Ю
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод хлопкоочистительной машины | 1980 |
|
SU874780A1 |
| Привод хлопкоочистительной машины | 1979 |
|
SU926096A1 |
| Устройство управления приводом хлопкоочистительной машины | 1986 |
|
SU1315533A1 |
| Устройство для управления приводом хлопкоочистительной машины | 1982 |
|
SU1097724A1 |
| Устройство управления хлопкоочистительной машиной | 1986 |
|
SU1514844A1 |
| Способ питания хлопкоочистительных машин волокнистым материалом | 1976 |
|
SU592880A1 |
| Устройство для контроля производительности батареи хлопкоперерабатывающих машин | 1989 |
|
SU1687659A1 |
| Устройство для управления процессом джинирования | 1986 |
|
SU1395701A1 |
| Устройство автоматического регулирования линейной плотности волокнистого материала | 1990 |
|
SU1770470A1 |
| Способ контроля работы хлопкоперерабатывающей машины и устройство для его осуществления | 1986 |
|
SU1333722A1 |
Изобретение относится к хлопко- перерабатывающему оборудованию,. Целью изобретения является повьппение точности управления путем учета фактической подачи волокна питающими валиками. Для этого стабилизирующий нагрузку рабочих органов контур регулирования , содержащий датчик 1 и задатчик 2 нагрузки главного привода 3 машины 4, компенсатор 8 холостого хода привода 3 и алгебраический сумматор 10, подключенный выходом к приводу 5 питающих валиков 6, снабжен датчиком 7 нагрузки привода пи- таюпц1х валиков и решающим блоком 9, выполняющим преобразование Xj(x 4 + + х,.)/2, что позволяет корректировать управляющее воздействие Ug по колебаниям фактической подачи волокна из распределительного шнека I1 к питающим валикам 6 по косвенному параметру х . 2 ил. (Л
ел
со
Изобретение относится к текстильной пром шшенности, к оборудованию для первичной обработки хлопка-сырца
Цель изобретения - повьппение точности управления лутем учета фактической подачи волокна питающими валиками.
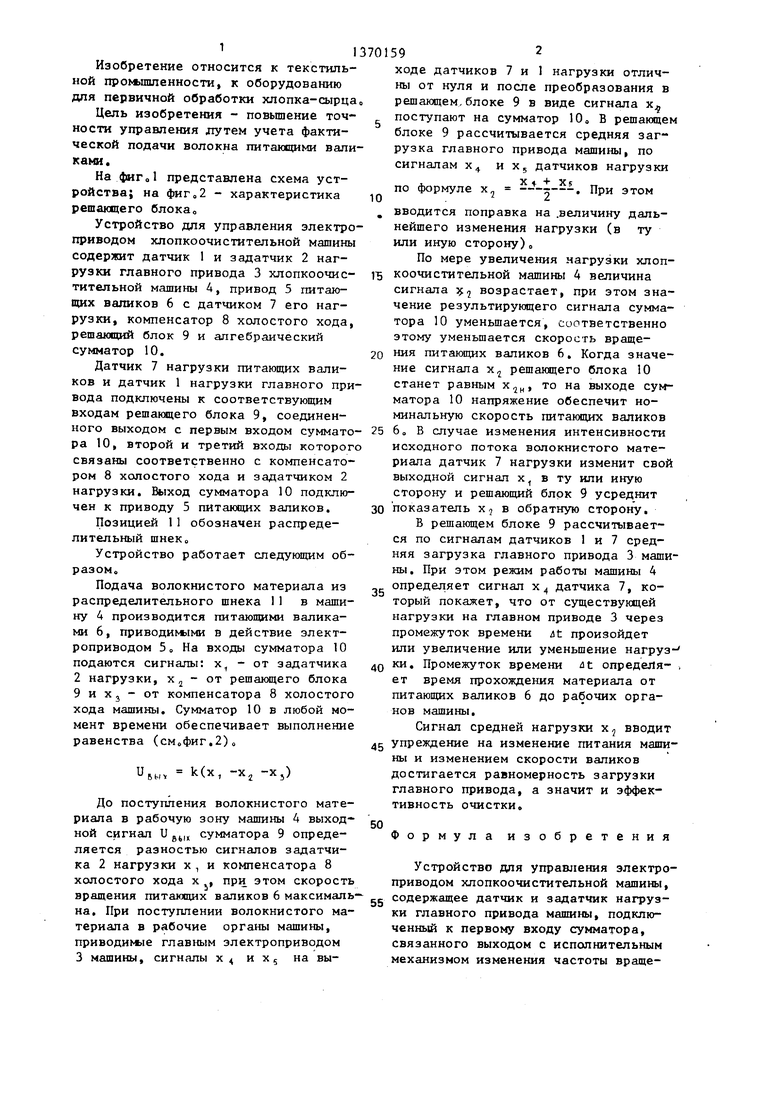
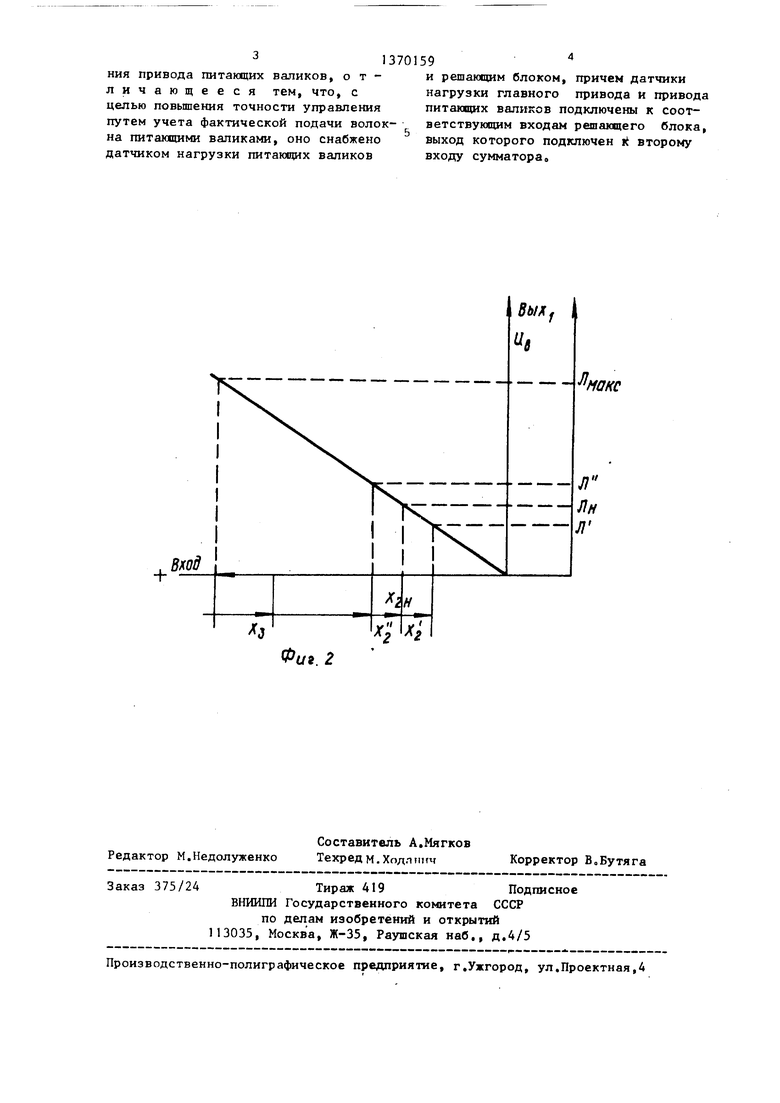
На фиг о 1 представлена схема устройства; на фиг о 2 - характеристика решающего блока
Устройство для управления электроприводом хлопкоочистительной машины содержит датчик 1 и задатчик 2 нагрузки главного привода 3 хлопкоочистительной машины А, привод 5 питающих валиков 6 с датчиком 7 его нагрузки, компенсатор 8 холостого хода, решаюпщй блок 9 и алгебраический сумматор 10.
Датчик 7 нагрузки питающих валиков и датчик 1 нагрузки главного привода подключены к соответствующим входам решакщего блока 9, соединенного выходом с первым входом сумматора 10, второй и третий входы которог связаны соответственно с компенсатором 8 холостого хода и задатчиком 2 нагрузки. Выход сумматора 10 подключен к приводу 5 питающих валиков.
Позицией 11 обозначен распределительный шнек о
Устройство работает следукяцим образом
Подача волокнистого материала из распределительного шнека 11 в машину 4 производится питающими валиками 6, приводимыми в действие электроприводом 5 о На входы сумматора 10 подаются сигналы: х. - от задатчика
2 нагрузки, X2 - от решающего блока 9 и X3 - от компенсатора 8 холостого хода машины. Сумматор 10 в любой момент времени обеспечивает выполнение равенства (смоФиг.2),
и
Rt-iv
k(x, -х,2 -х,)
До поступления волокнистого материала в рабочую зону машины 4 выходной сигнал и сумматора 9 определяется разностью сигналов задатчика 2 нагрузки X, и компенсатора 8 холостого хода х , при этом скорость
45 упреждение на изменение питания машины и изменением скорости валиков достигается равномерность загрузки главного привода, а значит и эффективность очистки.
50
Формула изобретения
Устройство для управления электроприводом хлопкоочистительной машины, вращения питающих валиков 6 максималь содержащее датчик и задатчик нагруз- на. При поступлении волокнистого ма-ки главного привода машины, подклютериала в рабочие орггшы машины, приводиьые главным электроприводом
ченный к первому входу сумматора, связанного выходом с исполнительным механизмом изменения частоты враще3 машины, сигналы х 4 и Xj на вы
2
ходе датчиков 7 и 1 нагрузки отличны от нуля и после преобразования в решающем-блоке 9 в виде сигнала х поступают на сумматор 10 В решающем блоке 9 рассчитывается средняя загрузка главного привода машины, по
сигналам х их, датчиков нагрузки
по формуле X,
При этом
X f + Х5
5 - 5 .
вводится поправка на .величину дальнейшего изменения нагрузки (в ту или иную сторону)о
По мере увеличения нагрузки хлоп- коочистительной машины 4 величина сигнала з возрастает, при этом значение результирующего сигнала сумматора 10 уменьшается, соответственно этому уменьшается скорость вращения питанщих валиков 6. Когда значение сигнала х решающего блока 10 станет равным х,|, то на выходе сумматора 10 напряжение обеспечит номинальную скорость питающих валиков 6 о В случае изменения интенсивности исходного потока волокнистого материала датчик 7 нагрузки изменит свой
выходной сигнал х, в ту или иную
сторону и решающий блрк 9 усреднит показатель Xj в обратную сторону,
В решающем блоке 9 рассчитывается по сигналам датчиков 1 и 7 средняя загрузка главного привода 3 машины. При этом режим работы машины 4 определяет сигнал х датчика 7, который покажет, что от существующей нагрузки на главном приводе 3 через промежуток времени ut произойдет или увеличение или уменьшение нагруз-
ки. Промежуток времени ut опредеЛя- , ет время прохождения материала от питающих валиков 6 до рабочих органов машины.
Сигнал средней нагрузки х вводит
упреждение на изменение питания машины и изменением скорости валиков достигается равномерность загрузки главного привода, а значит и эффективность очистки.
50
Формула изобретения
ченный к первому входу сумматора, связанного выходом с исполнительным механизмом изменения частоты вращения привода питающих валиков, отличающееся тем, что, с целью повьшения точности управления путем учета фактической подачи волокна питающими валиками, оно снабжено датчиком нагрузки питающих валиков
С макс
Фи9.2
и решающим блоком, причем датчики нагрузки главного привода и привода питакщих валиков подключены к соответствующим входам решающего блока, выход которого подключен k второму входу сумматора
| Привод хлопкоочистительной машины | 1979 |
|
SU926096A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
