оо
со
о
tsD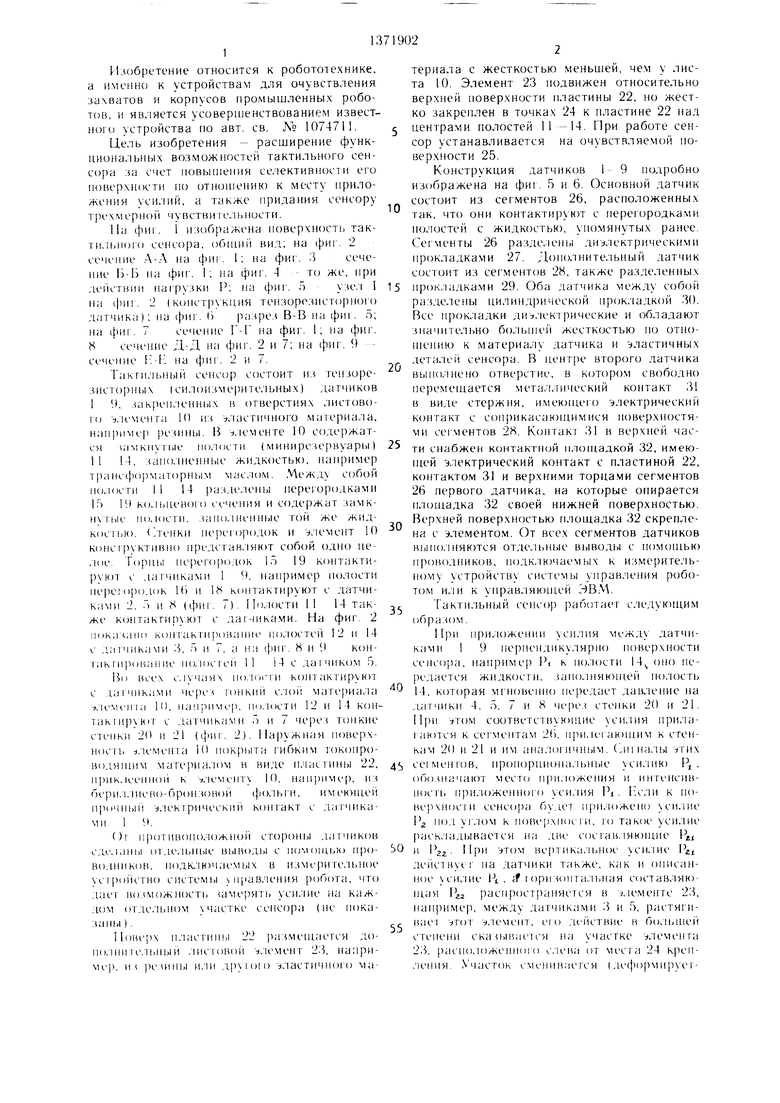
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| Вибрационный питатель | 1981 |
|
SU945014A1 |
| Матричный тактильный датчик | 1986 |
|
SU1388282A1 |
| Тактильный сенсор промышленного робота | 1981 |
|
SU1074711A1 |
| Транспортная система автоматизированной линии сборки | 1986 |
|
SU1495071A1 |
| Логическая игра "Спрут | 1988 |
|
SU1671332A1 |
| Кассета для мытья,сушки и хранения посуды | 1985 |
|
SU1329767A1 |
| Устройство для управления роботом технологического конвейера | 1987 |
|
SU1526985A1 |
| Устройство для многопостовой сварки | 1986 |
|
SU1344535A1 |
И.зобретеиие относится к робототе.х- нике, а и.менно к устройства.м для очувствления за.чватов и корпусов нро.мьпиленны.х роботов. Целью изобретения является рас- ншрение функниональны.х возможностей устройства за счет повышения его селективности по отно1иению к месту приложения усилий и |ридания тре.хмерной чувствительности. Для этого устройство, состоящее из листового упругого элемента, в котором вы- по.шены .замкнутые полости, заполненные жидкостью, токопроводящеи пластины, установленной на упругом элементе, и тензо- резисторны.х датчиков, расположенных в отверстиях упругого элемента и разделенных замкнутыми перегородками, также заполненными жидкостью,, снабжено дополнительным листовым упругим элементом, расположенным поверх токопроводяшей пластины, тензорезисторные датчики выполнены сегментны.ми со взаимной изоляцией сегментов, а внутри каждого датчика расположен дополнительный датчик, также состоящий из взаимно изолированных тов, причем оба датчика взаимно изолированы. Внутри дополнительного датчика установлен перемещающийся электрический контакт в виде стержня, верхняя часть которого соединена с дополнительным упругим элементом, который имеет точечное крепление над центрами замкнуты.х полостей основного упругого элемента. 9 ил. (Л
N
Изобретение относится к робототехнике, а именно к устройствам для очувствления захватов и корпусов промышленных роботов, и является усовер1ненствованием известного устройства по авт. св. Л 1074711.
Цель изобретения - расширение функциональных возможностей тактильного сенсора за счет повьинепия селективности ei o поверхности но отнои1еник) к месту приложения усилий, а также придания сенсору трехмерной чуветви гель пости.
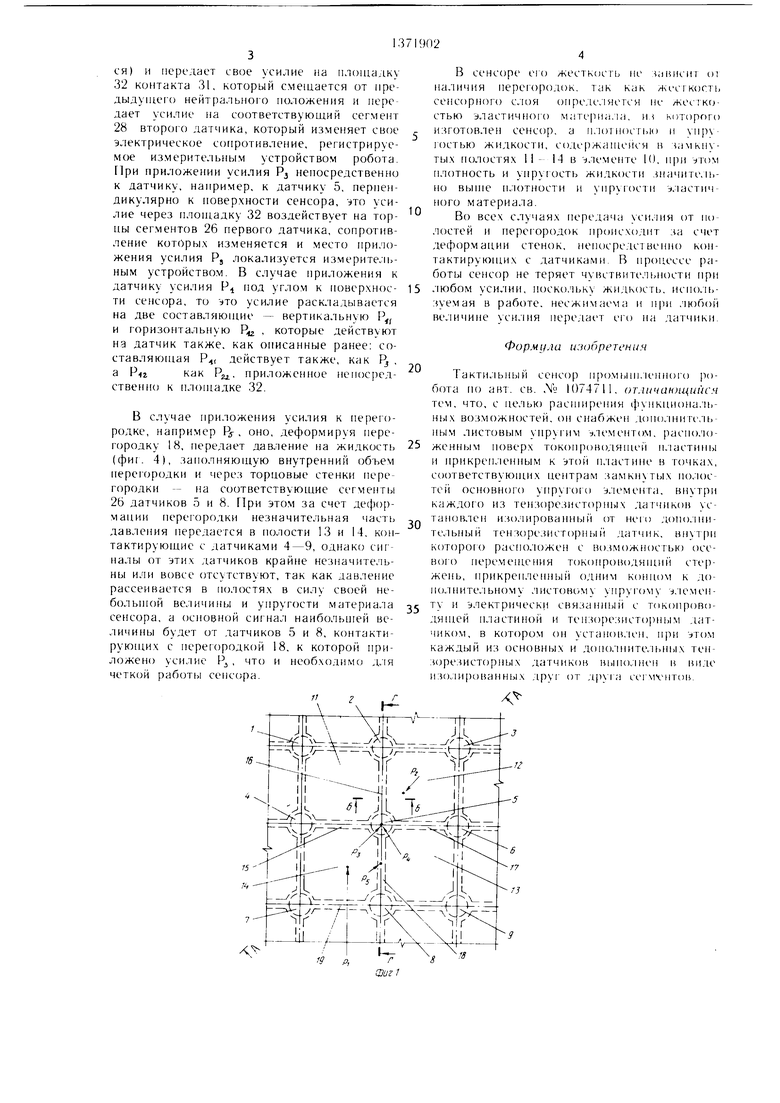
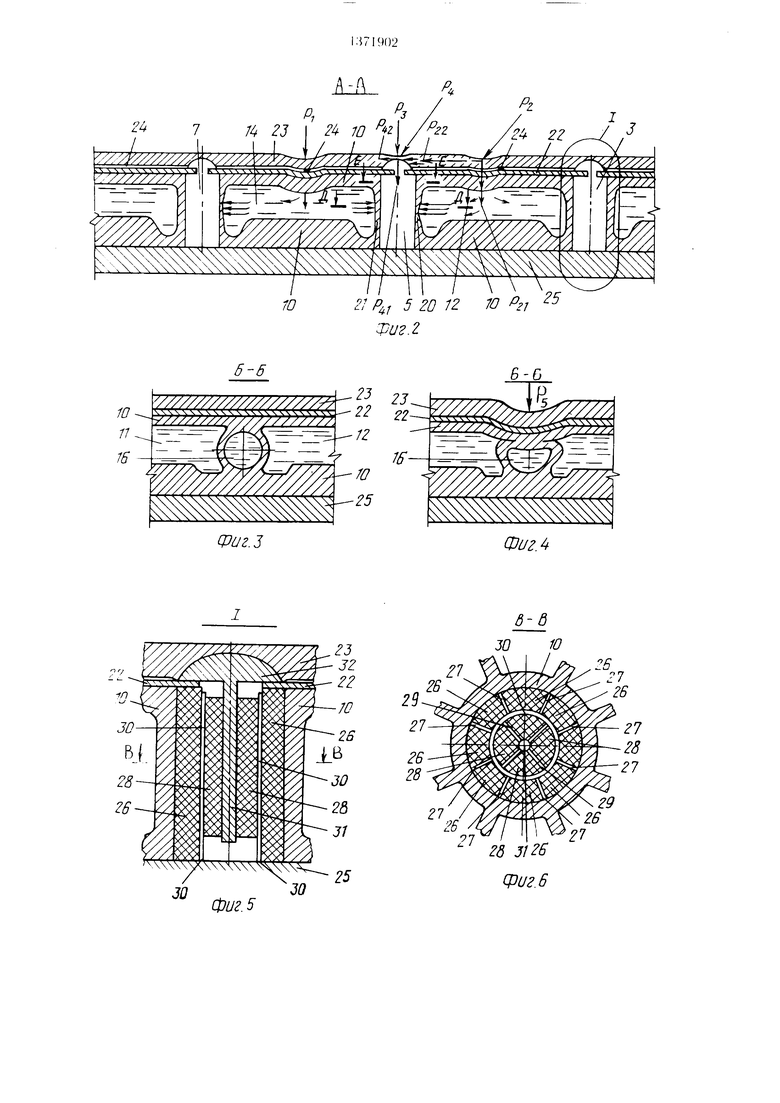
Па фиг. i изображена юверхность так- ти,1Ы1ого сенсора. oOinHii вид; на (зиг. 2 сечение .Л-.Л на фиг. 1; на фи1 . 3 сечение Ь-Ь на фиг. 1; на фиг. 4 то же, при действии нагрузки Р; на узе, 1 I на (|и11. 2 (конструкция тензорезисторного дагчика); на (})иг. ( разрез В-В на фиг. 5; на (.я . 7 сечение Г-Г на фиг. 1; на (нг. сечение Д-Д на фиг. 2 и 7; на фи1. 9 - сечепие М: на фн1. 2 и 7.
Такгильный сенсор состоит из гензоре- зисторных |силоиз 1е)ительных) датчиков
I9, зак 1е11ленн1)1Х в отверстиях ,тистово- го :1.1е 1ента 10 из ластичного материала, например рези1п 1. В элементе 10 содержатся замкпуг1,1е полости (минирезервуар,)
II14, :uino.nieHHi)ie жидкостью, например транс(1)орматорным мас,пом. , собой нолосги II 14 разделены нере1 ородками 1Г) 19 кольцевого сечения и содержат замк- нугые по,1ости. запо.шенные той же жид- кос гыо. (/генки 11ерего|1одок и :, 1емент 10 KOHCI руктивно п)едстав,1як)Т собой одно пе- ,И)е. Торны пере1 ор()док 15 19 контакти- )ук)1 с дагчиками 1 9, например полости nefiei (1)одок К) и 18 контактируют с датчиками 2, Г) и 8 (())иг. 7). 1(),:|()сти II 14 также контактируют с да1чиками. На фиг- 2 показано коптактиjionanne iU),:iocTcii 12 и 14 с дагчиками 3, Г) и 7, а на фи1 8 и 9 кон- гак гиронаиие по, 1остеГ| 11 14 с дагчиком Г).
Bi) всех с.|учая но.юсти контактируют с датчиками че|)ез гонки c, ioii материала .тем1Ч1та II), fiaHjHiMep, но.тости 12 и 14 кон- гакгируюг с датчиками 5 и 7 через тонкие стенки 20 и 21 (фиг. 2). 11а|)ужная новерх- :(.темента 10 нок)ыта г ибким гоконро- нодяпшм , н виде и, 1асгипы 22, прик,К енной к , 1емент 10, fianpHviep, из бери. Line во-б РОИ 30 во И (|1ольги, имеюнк й н|п)чньп1 :,1ек грический контакт с дагчика- ми 1 9.
Ог П|)ОТ11В0110. 10ЖНОЙ стороны Д 1 ЧИКОВ
сде,1с1НЬ1 О1дельп1 1е В1 1воды с ncjMoinbH) ii)o- водннков, нодк.тючаемьгх в изме)иге,тьное ус r})t iicTBo системы 1||1ав,1ения робота, что дает Возможность замерять уси, 1ие па каждом отде,ты1ом частке сепсора (не показаны ).
Поверх нласгнпы 22 размешается дополните.тьн1)1Й .THCTOBoii .темент 2.3, нанри- vu p, и резины или дру10 о :1,тастичн()го ма0
5
0
5
0
5
0
Ь
O
5
териала с жесткостью меньшей, че.м у листа К). Элемент 23 иодвижен относительно верхней поверхности пластины 22, но жестко закреплен в точках 24 к пластине 22 з;. центрами полостей 11-14. При работе сенсор устанавливается на очувствляемой по- верхпости 25.
Конструкция датчиков 1 9 подробно изображена на фи1. 5 и 6. Основной датчик состоит из сегментов 26, расположенны.х так, что они контактируют с перегородками нолостей с жидкостью, уномянутых ранее. Сегменты 26 разделены диэлектрическими ирокладками 27. Доиолнительный датчик состоит из сегментов 28, также разделенных ирокладками 29. Оба датчика между собой разделены цилиндрической прокладкой 30. Все прокладки ди:(,чектрические и обладают зиачительно бо.пьшей жесткостью по отношению к материалу датчика и эластичных дета.тей сенсора. В цент)е второго датчика вьиюлнено отверстие, в котором свободно перемешается мета, 1лический контакт 31 в виде стержня, имеющего электрический контакт с сонрикасаюшимися новерхиостя- ми се -ментов 28. Контакг ,31 в верхней части снабжен контактной пло1цадкой 32, имеющей электрический контакт с цластиной 22, контактом 31 и верхними торцами сегментов 26 первого датчика, на которые опирается площадка 32 своей нижней поверхностью. Верхней поверхностью площадка 32 скреплена с элементом. От всех сегментов датчиков выпо.тняются отде.тьные выводы с помоншю 11ров()дников, нодк.тючаемьгх к измерительному устройству системы управлепия роботом ИоТИ к управ.тяюпгей ЭВМ.
Тактильный сенсор работает следующим образом.
При приложении усилия между датчиками I 9 перпендику.тярно новерхиости сенсора, например Pi к нолости 14, оно передается жндкости, заио,тняюним1 полость 14, которая мгновенно передает дав:1ение на дагчики 4. 5. 7 и 8 через стенки 20 и 21. При этом cooTBCTCTByKiHUic уси,тия при.ча- гаются к сегмептам 2(), прилегающим к стенкам 20 и 21 и им аналогичн1)1М. (ли этих се мен1ов, проп()р 1иопал1)Ные уси,тию Р, , обозначают месго при.южения и интенсив- носП) при.тоженного уси.чия Pi. Глми к tio- верхносги сепсора будет . 1ожепо ycn,ine Р под углом к iiofU pxnoc I и, го такое уси.тие раск,чадывается на две сосгав.тяюии1е и Ргг При этом вертика,тык)е уси,тие l- де11ствус1 па датчики также, как и описанное усилие PI , ;f I оризоита.тьная составляю- И1ая распрост)апяется в э.тементе 215, паприме|), между датчиками Л и 5, растягивает этот элемепт, eiо действие в бо.тьшей степени сказьп .ается на участке элеме1гга 23. )аспо,тожс-1ПИ11 о с.тева от месга 24 креп- , 1е1П1я. част()к (. 1еппва1тся (Д(.()1())мируе1 6-6
, ojp
,, - - -/////// - //////
(чЧЧУчЧ с Q с с чЧЧ («; ггт- - // 7(/(. 777/// /.(
7 f / ХУ /X ////J - Х- X X X X X У,.: л X л. -у -у -у
Фиг.:
I
0 ,
фиг. 5
25
21 5 ZO 12
cpu.z
70
B-G
Фиг А
в-д
Л-Л
--Iфиг.9
78
| Тактильный сенсор промышленного робота | 1981 |
|
SU1074711A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
