Позиция Центр лозицио- -i загрузки пирования первого poSoma
- Центр позиционирования Второго poSoma ,,, Позиция 07 Т/выгрузки
О /М
со сд
со
00 О5
Изобретение относится к обработке металлов давлением и может быть использовано для автоматизации штамповочных работ с применением промышленных роботов.
Целью изобретения является расширением технологических возможностей за счет обеспечения возможности независимой на- стройки гнезд с заготовками в конечных положениях кареток по двум координатам.
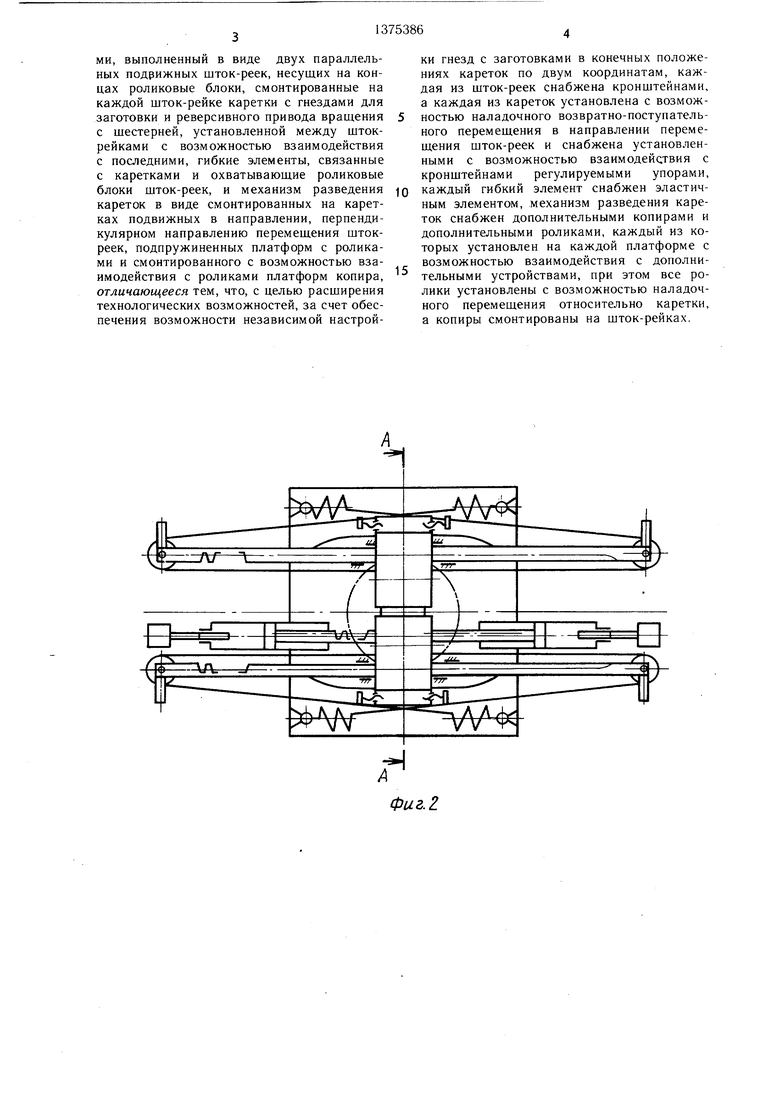
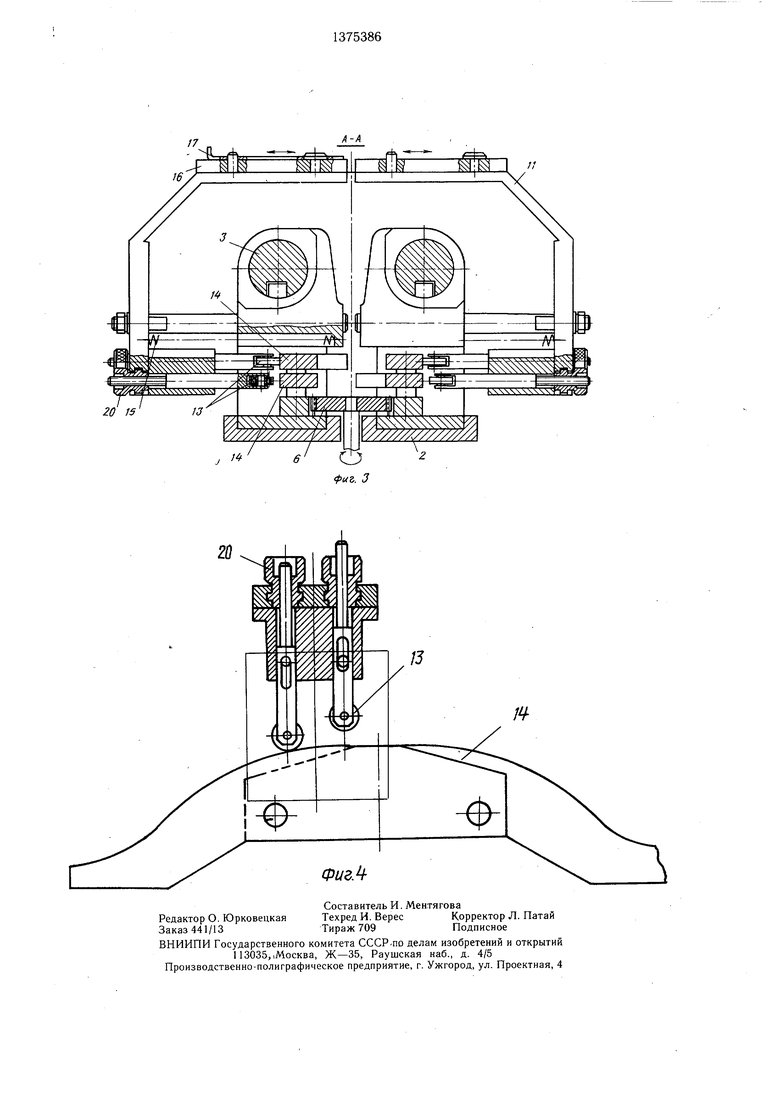
На фиг. 1 изображено предлагаемое устройство при крайних положениях кареток, план; на фиг. 2 - то же, при промежуточном положении кареток; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - момент перехода роликов с одного копира на другой.
Устройство содержит раму 1, в направляющих 2 которой установлены две подвижные вдоль оси шток-рейки 3, на концах которых закреплены роликовые блоки 4 с крон- штейнами 5. Шток-рейки 3 связаны шестерней 6, получающей реверсивное врашение от силовых цилиндров 7 реверсиввЕОго привода через рейку 8 и шестерню 9.
На шток-рейках 3 подвижно смонтированы каретки 10 с платформами 11, установленными на последних с возможностью перемещения в поперечных к подаче направлениях. Каретки 10 содержат по два противоположно расположенных регулируемых упора 12, взаимодействующих с кронштейнами 5.
Платформы 11 снабжены каждая двумя регулируемыми роликами 13, расположенными со смещением один над другим и взаимодействующими с закрепленными также один над другим на шток-рейках 3 копирами 14, и пружинами 15 возврата. Кроме того, на платформах 11 установлены трафареты 16 с гнездами для заготовок 17. Каретки
10соединены с гибкими элементами цепями 18, охватывающими роликовые блоки 4 шток-реек 3. Концы цепей 18 натянуты и закреплены через эластичный элемент-пружину 19 на раме 1 устройства. Положение каждого ролика относительно платформы
11регулируется гайкой 20.
Устройство работает следующим обра- зом.
На позиции загрузки рука первого промышленного робота с заготовкой 17 расположена над трафаретом 16 каретки 10. Для точной укладки заготовки, т.е. совмещения центров позиционирования робота и трафарета, оператор, вращая упор 12, упирающийся в кронштейн 5, передвигает каретку по линии передачи за счет деформации пружин 19 и совмещает трафарет 16 с заготовкой 17 по оси X. Далее оператор, регули- руя выдвижение ролика 13 вращением гайки 20, перемещает за счет деформации пружины 15 платформу 11 в поперечном к по
5
0
5
5
5
0
0
0
даче направлении и добивается совмещения трафарета с заготовкой по оси У.
В это время вторая каретка 10 находится на позиции выгрузки.
Центр позиционирования второго робота не совпадает с центром позиционирования первого робота, поэтому оператор, вращая упор 12 и ролик 13 второй каретки 10, также добивается совмещения центров позиционирования для позиции выгрузки. Включаются силовые цилиндры 7. Через щестер- ню 9 рейка 8 вращает щестерню 6 и перемещает шток-рейки 3 в направляющих 2 во взаимно противоположных направлениях. При этом цепи 18 перемещают каретки 10 по шток-рейкам 3 навстречу друг другу вдоль общей линии подачи. При подходе кареток 10 друг к другу ролики 13, скользя каждый по профилю своего копира 14, раздвигают платформы в направлении, поперечном к направлению подачи. Этим обес- печивается возможность дальнейщего движения кареток 10. Полностью раздвинувшись, ролики 13 и, следовательно, платформы 11 получают заданное положительное или отрицательное приращение движения по координате У до тех пор, пока второй ролик 13 не войдет в контакт со своим копиром 14. Таким образом, ролики 13 вторую фазу движения совершают по другому копиру 14. После расхождения кареток 10 под действием пружин 15 платформы 11 возвращаются на линию передачи с заданной разницей координат. В конце хода кареток 10 упоры 12 упираются в свои кронштейны 5 и прекращают относительное движение по шток-рейкам 3, продолжающим переносное движение. Остановка кареток 10 компенсируется деформацией пружины 19. Таким образом, абсолютное движение кареток осуществляется с заданной разницей координат по оси X.
После этого на позиции загрузки совмещают центры позиционирования робота с кареткой, вернувщейся с позиции разгрузки, и в нее укладывается новая заготовка, а другая каретка 10, переместившаяся на позицию выгрузки, позиционируется с вторым роботом и освобождается от заготовки. После этого цикл работы устройства повторяется.
Изобретение позволяет осуществлять независимую настройку каждой каретки с заготовками по двум координатам, при этом время переналадки устройства на новую заготовку сокращается.
Формула изобретения
Устройство для переноса заготовок, содержащее смонтированные на раме передаточный механизм с транспортными органами, выполненный в виде двух параллельных подрижных шток-реек, несущих на концах роликовые блоки, смонтированные на каждой шток-рейке каретки с гнездами для заготовки и реверсивного привода врашения с шестерней, установленной между шток- рейками с возможностью взаимодействия с последними, гибкие элементы, связанные с каретками и охватывающие роликовые блоки шток-реек, и механизм разведения кареток в виде смонтированных на каретках подвижных в направлении, перпендикулярном направлению перемещения шток- реек, подпружиненных платформ с роликами и смонтированного с возможностью взаимодействия с роликами платформ копира, отличающееся тем, что, с целью расширения технологических возможностей, за счет обеспечения возможности независимой настрой
Q
5
ки гнезд с заготовками в конечных положениях кареток по двум координатам, каждая из шток-реек снабжена кронштейнами, а каждая из кареток установлена с возможностью наладочного воз врат но-поступательного перемещения в направлении перемещения шток-реек и снабжена установленными с возможностью взаимодействия с кронштейнами регулируемыми упорами, каждый гибкий элемент снабжен эластичным элементом, механизм разведения кареток снабжен дополнительными копирами и дополнительными роликами, каждый из которых установлен на каждой платформе с возможностью взаимодействия с дополнительными устройствами, при этом все ролики установлены с возможностью наладочного перемещения относительно каретки, а копиры смонтированы на шток-рейках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса заготовок | 1982 |
|
SU1050884A2 |
| Устройство для переноса заготовок | 1979 |
|
SU893586A1 |
| Автооператор | 1986 |
|
SU1364430A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автооператор | 1987 |
|
SU1465249A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Устройство для переноса заготовок | 1983 |
|
SU1260075A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| ПОРТАЛЬНЫЙ РОБОТ | 1988 |
|
RU2022770C1 |
Изобретение относится к обработке металлов давлением и может быть использовано для автоматизации штамповочных работ с применением промышленных роботов. Цель изобретения - расширение технологических возможностей за счет обеспечения возможности независимой настройки гнезд с заготовками в конечных положениях кареток по двум координатам. Цель достигается введением независимого позиционирования заготовок на конечных позициях переноса. Для этого устройство снабжено Двумя регулируемыми упорами 12, расположенными на каретке, кронштейнами 5, закрепленными на концах шток-реек, пружинами 19, соединяющими раму с цепью, и двумя регулируемыми роликами, расположенными со смещением один над другим и взаимодействующими со своими копирами 14. Последние закреплены также один над другим на щток-рейке. При этом время переналадки устройства на новую заготовку снижается. 4 ил. to
Фиг. г
/(-А
20 15
/«
2й
| Устройство для переноса заготовок | 1979 |
|
SU893586A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
