Фи.г
Изобретение относится к машиностроению, может быть использовано для автоматизации штамповочных работ с применением промышленных роботов.
Целью изобретения является расширение технологических возможностей путем обеспечения ориентирования изделий в крайних положениях каретки.
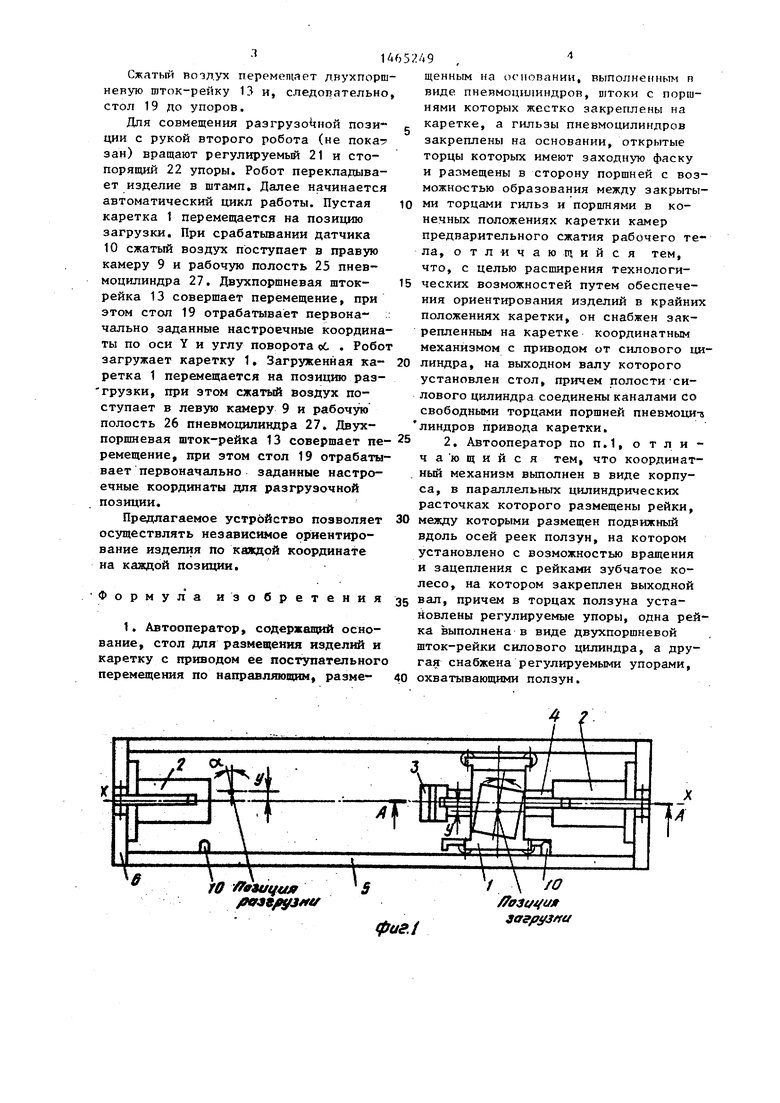
На фиг.1 изображен автооператор, общий ВИД; на фиг.2 - сечение А-А на фипН} на фиг.З - сечение Б-Б на фиг.2. .
Автооператор содержит каретку 1 и пневмоцилиндры, выполненные в виде гильз 2, поршней 3 со штоками 4. Направляющие 5 образзтот основание 6, на котором жестко закреплены гильзы 2. Каретка 1 фиксируется в конечных положениях выступами 7 и подпружиненными захватами 8, В камеры 9 предварительного сжатия пневмоцилиндров подается сжатый воздух. Устройство оборудовано датчиками 10 положения каретки 1.
На каретке t установлен координатный механизм 11, содержащий корпус 12, в цилиндрическгас расточках которого установлены двухпоршневая шток-рейк а 13 и рейка 14. Рейки 13 и 14 находятся в зацеплении с зубчатым колесом 15, расположенным в подвижном ползуне 16 на подшипниках 17. На выходном валу 18 зубчатого колеса 15 закреплен стол 19, на котором крепится трафарет 20 под изделие. В торцах ползуна 16 диаметрально расположены регулируемые упоры 21, взаимодействующие с корпусом 12. В торцы рейки 14 ввернуты стопорящие упоры 22, охватывшощие ползун 16,
Одна цилиндрическая расточка корпуса 12 закрыта крышками 23, в которых имеются каналы 24 для подвода воздуха к рабочим полостям 25 и 26 силового цилиндра 27. Каналы 24 под ключаются к камерам 9 предварительного сжатия.
Автооператор работает следуницим образом.
Автооператор устанавливают по линии передачи изделий. В исходном положении каретка 1 находится на позиции загрузки и удерживается при помощи выступа 7 подпружиненным захватом 8. Окатый воздух подается в паровую камеру 9 предварительного сжатия и по каналам 24 в рабочую
0
0
5
0
5
0
5
полость 25 силового цилиндра 27. Рабочая полость 26 силового цилиндра 27 через другие каналы 24 соединена с атмосферой. Давлением сжатого воз.- духа в полости 25 двухпоршневая шток- рейка 13 отжимается к центру, но ее перемещению препятствуют вьщвинутые упоры 21 ползуна 16, а вращение зубчатого колеса 15 невозможно ввиду фиксации рейки 14 относительно ползуна 16 стопорящими упорами 22 Таким образом, стол 19 с трафаретом 20 строго фиксируется.
Рука первого робота (не показан) устанавливается с изделием над трафаретом 20. При несовпадении изделия с трафаретом 20 ориентируют каретку 1 вдоль линии передачи изделий (ось X), перемещая ее по направляющей, например, за счет вылета выступа 7. Далее при вращении регулируемого упора освобождается ползун 16, который получает перемещение через зубчатое колесо 15 и двухпоршневую шток-рейку 13 под действием давления воздуха в рабочей полости 25 силового цилиндра 27. При этом перемещается стол 19 с трафаретом 20 до совмещения с изделием по координате Y перпендикулярно линии подачи изделий.
Если требуется совмещение изделия с трафаретом 20 по углу, то, вращая стопорящий упор 22, освобождают рейку 14 от блокировки с ползуном 16, при этом под действием давления сжатого воздуха двухпоршневая шток-рейка 13 дополнительно перемещается, вращая зубчатое колесо 15, т.е. совмещая трафарет 20 с изделием по углу.
Робот кладет изделие в трафарет 20. Выдает сигнал на перемещение каретки 1. Открьшается захват 8, и за счет энергии сжатого воздуха поршень 3 перемещается на расстояние, равное длине последнего, срабатьгаает датчик 10, отключающий подачу сжатого воздуха. При подходе к аретки 1 к позиции разгрузки поршень 3 входит в противоположную гильзу 2, далее cpaбaть - вают подпружиненный захват 8 и датчик .10, который выдает сигнал на подачу сжатого воздуха в левую камеру 9 предварительного сжатия и по каналу 24 в рабочую полость 26 цилиндра. При этом рабочая полость 25 каналом 24 соединена с атмосферой.
1
Сжатьй воэдух перемещает диухпорш невую шток-ренку 13 и, следовательно стол 19 до упоров.
Для совмещения разгрузочной позиции с рукой второго робота (не пока зан) вращают регулируемый 21 и стопорящий 22 упоры. Робот перекладывает изделие в штамп. Далее начинается автоматический цикл работы. Пустая каретка 1 перемещается на позицию загрузки. При срабатывании датчика 10 сжатый воздух поступает в правую камеру 9 и рабочую полость 25 пнев- моцилиндра 27. Двухпоршневая шток- рейка 13 совершает перемещение, при этом стол 19 отрабатывает первона- ; чально заданные настроечные координаты по оси Y и углу поворота оС . Робот загружает каретку 1, Загруженная ка- ретка 1 перемещается на позицию раз- грузки, при этом сжатый воздух поступает в левую камеру 9 и рабочуто полость 26 пневмоцилиндра 27. Двухпоршневая шток-рейка 13 соверщает пе- ремещение, при этом стол 19 отрабатывает первоначально заданные настроечные координаты для разгрузочной позиции.
Предлагаемое устройство позволяет осуществлять независимое ориентирование изделия по каждой координате на каждой позиции.
Формул а изобретения
1. Автооператор, содержащий основание, стол для размещения изделий и каретку с приводом ее поступательного перемещения по направляющим, разме-
/,9 ,-
ценным на основании, выполненным п виде пнеимоцшшндров, штоки с поршнями которых жестко закреплерш на каретке, а гильзы пневмоцилиндров закреплены на основании, открытые торцы которых имеют заходную фаску и размещены в сторону поршней с воз- можно :тью образования между закрытыми торцами гильз и порпшями в конечных положениях каретки камер предварительного сжатия рабочего тела, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения ориентирования изделий в крайних положениях каретки, он снабжен закрепленным на каретке координатным механизмом с приводом от силового цилиндра, на выходном валу которого установлен стол, причем полости силового цилиндра соединены каналами со свободными торцами поршней пневмоци-в линдров привода каретки.
2. Автооператор по п.1, о т л и - ча ющийся тем, что координатный механизм выполнен в виде корпуса, в параллельных цилиндрических расточках которого размещены рейки, между которыми размещен подвижный вдоль осей реек ползун, на котором установлено с возможностью вращения и зацепления с рейками зубчатое колесо, на котором закреплен выходной вал, причем в торцах ползуна установлены регулируемые упоры, одна рейка выполнена в виде двухпоршневой шток-рейки силового цилиндра, а другая снабжена регулируемыми упорами, охватьшающими ползун.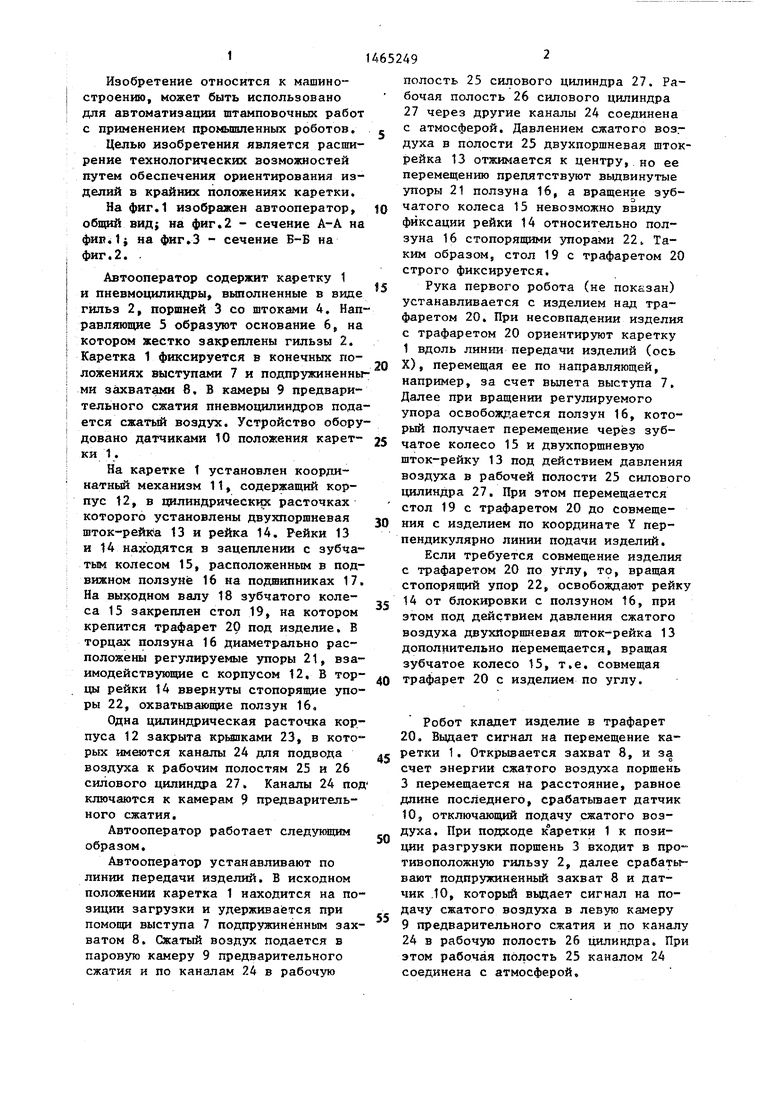
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1202861A1 |
| Плоскошлифовальный автоматический комплекс для двусторонней обработки деталей | 1988 |
|
SU1657372A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Многопозиционный пресс для штамповки деталей | 1988 |
|
SU1542670A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1986 |
|
SU1366265A2 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автооператор | 1982 |
|
SU1033288A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |

Изобретение относится к области машиностроения и может быть использовано для автоматизации штамповочных работ с применением промьшшенных роботов. Цель изобретения - расширение технологических возможностей путем обеспечения ориентирования изделий в крайних положениях каретки. Х-х Для Этого устройство снабжено координатным механизмом, содержащим .параллельные шток-рейку 13 и рейку 14, находящиеся в зацеплении с зубчатым колесом 15, расположенным в ползуне, подвижном вдоль осей этих реек. На валу 18 зубчатого колеса 15 закреплен стол 19, а в торцах ползуна расположены регулируемые упоры. Шток- рейка 13 выполнена двухпоршневой, а рейка 14 снабжена упорами, охватывающими ползун, причем обе рейки расположены в цилиндрических расточках корпуса 12, при этом одна из расточек с двухпоршневой шток-рейкой 13 с обоих торцов закрыта крьш1ками, образуя при этом силовой пневмоцилиндр. 1 з.п. ф-лы, 3 ил. « сл
Л ff99uqw9 /9039/ fftf
фаг/
г /
ffo3t/ tjr yaa/yyjffef
2
Редактор Л.Веселовская
Составитель Е.Ермолаев Техред М.Дидык
Заказ 870/18
Тираж 892
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб. д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина,101
6-6
gjt/.
Корректор М.Демчик
Подписное
| Пневмопривод каретки | 1979 |
|
SU840525A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
