00
СД
00
О5
4
Изобретение относится к области управления эрлифтными установками.
Цель изобретения - повьшение КПД эрлифтной установки.
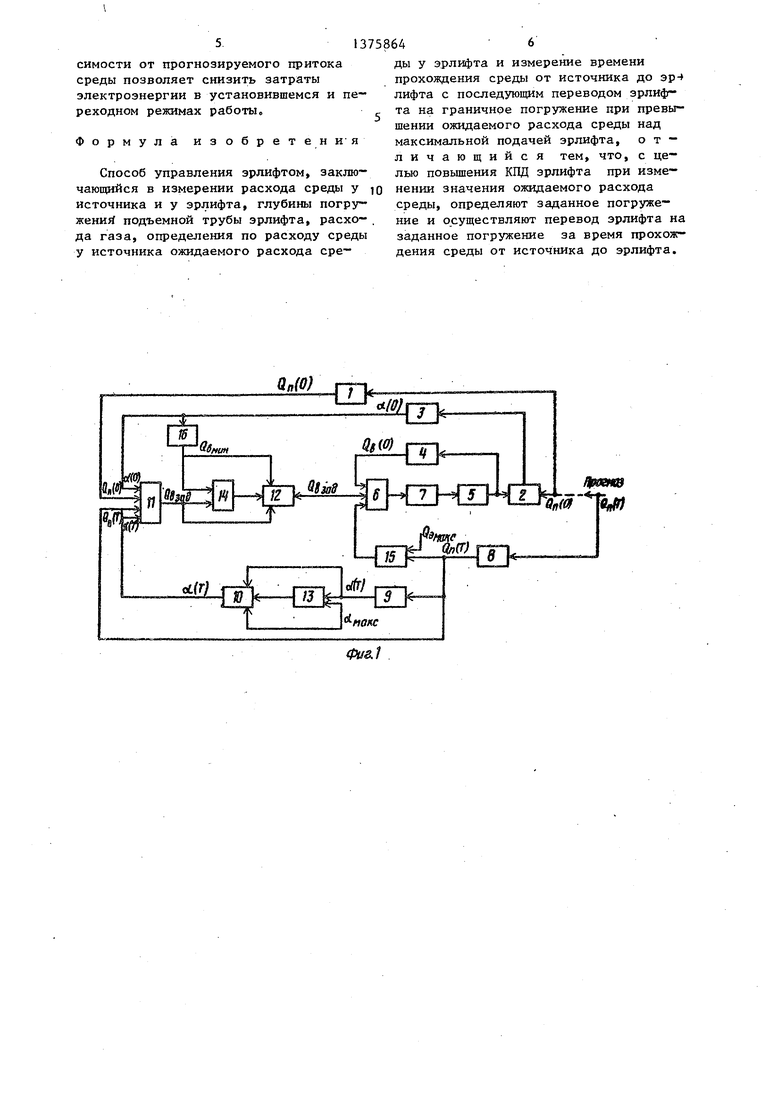
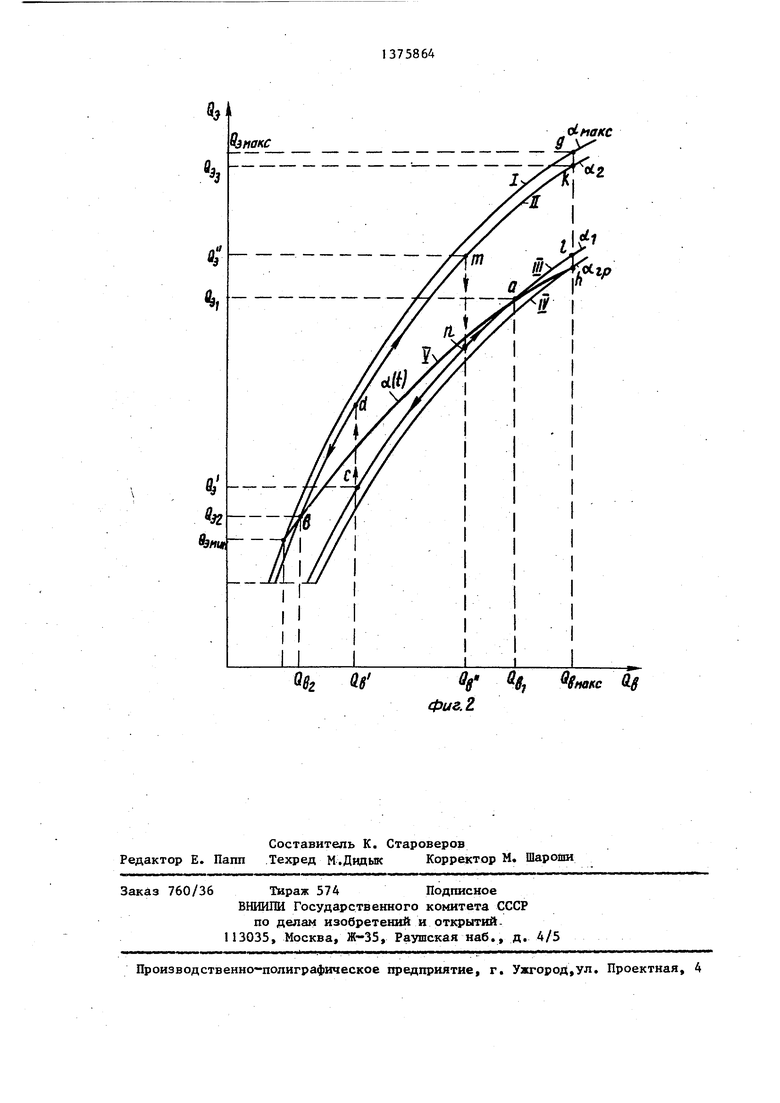
На фиг, 1 показана схема устройства, реализующего способ; на. фиг. 2 - расходные характеристики и другие графические зависимости, поясняющие предлагаемьш способ.
Устройство для оптимального управления эрлифтным гидррподъемом содержит датчики текущего притока 1 среды к эрлифту 2 и относительного погружения 3 подъемной трубы эрлифта 2, по- следовательно соединенные датчик 4 расхода воздуха компрессорной станции 5, регулятор 6 расхода, блок 7 регулирования компрессоров компрессорной станции 5, последовательно соединенные датчик 8 прогнозируемого притока среды, блок 9 заданного погружения, первьй ключ 10, блок II заданного расхода и второй ключ 12, соединенный с вторым входом регуля- тора 6 расхода, три компаратора ISIS, первый 13 из которых первым входом соединен с выходом блока 9 заданного погружения и выходом - с управляющим входом первого ключа 10, вто- рой 14 первым входом соединен с выходом блока 11 заданного расхода и выходом - с управляющим входом второго ключа 12, а третий 15 - первым входом - с выходом датчика 8 прогно- зируемого притока среды и выходом - с третьим входом регулятора 6 расхода, блок 16 минимального расхода, подключенный входом к датчику 3 относительного погружения и выходом к второму входу второго компаратора 14 и второго ключа 12. Датчики прогнозируемого притока 8 среды, текущего притока 1 среды и относительного погружения 3 подключены соответственно к второму, третьему и четвертому входам блока 11 заданного расхода, а на второй вход первого 13 и третьего 15 компараторов поданы сигналы, пропорциональные соответственно максималь- ному погружению и максимальной пода- ,че эрлифта.
Кривые I5 II, III и IV представляют собой расходные характеристики эрлифта соответственно при максимально возможном относительном погружении , при превьшении которого начинается перелив зумпфа, погружени
t и , и граничном относительнрм погружении oirp(i iiMoiKc о, о тр ). Граничное погружение oirp огцэеделяется из условия достижения погружением максимального значения ot, в том случае, если к эрлифту, работающему на о/.г- в точке h (Q - максимальI, КС
ный расход воздуха компрессорной станции), будет направлен максимальный приток Qy, среды в течение макс
максимально возможного для условий шахты времени Т,,. Расход воздуха
будет в течение всего времени Т
равен Q. . Предполагается также, MOI КС
что Qn больше максимально возмож длакс
НОЙ подачи эрлифта Q
Пример. Способ управления эрлифтом заключается в измерении расхода среды у источника и у эрлифта, глубины погружения подъемной трубы эрлифта, расхода газа, определении по расходу среды у источника ожидаемого расхода у эрлифта и измерении времени прохождения среды от источника до эрлифта с последующим переводом эрлифта на граничное погружение при превьш1ении ожидаемого расхода среды над максимальной подачей эрлифта, при этом при изменении значения ожидаемого расхода среды определяют заданное погружение и осуществляют перевод эрлифта на заданное погружение за время прохождения среды от источника до эрлифта. I
Устройство работает следующим образ ом.
Текущая установившаяся рабочая точка эрлифта определяется из условия статической оптимизации, т.е. она лежит на линии V оптимальных статических режимов. Так, например, при величине притока среды, равном Qn(T) - Qn( - ) Q,, находят относительное погружение об(Т) б6, , при котором расход электроэнергии в установившемся режиме минимален. Соответствующая данному притоку среды рабочая точка обозначена буквой -а (фиг. 2). Данное состояние работы поддерживается до тех пор, пока не изменится прогнозируемое значение притока Qf,(T) среды от датчика 8. Например, предсказанное значение Qn(T) среды через время Т становится равным Qn(T) Q, . При
этом в блоке 9 определяется новое значение относительного погружения сб(Т), которое также лежит на линии V оптимальных статических режимов и равно об (т) й 2-Это значение поступает в блок 11 через ключ 10. Рабочая точка эрлифта, соответствующая новому режиму работы, обозначена буквой Ъ.
Изменение режима работы эрлифта, т.е. переход из точки а в точку Ъ осуществляется из условия динамической оптимизации, Дпя этого в блоке 11 определяется постоянное значение
расхода воздуха Q в
- Q
зад
димое для изменения погружения с 6(0) ui на (т) обг за время
необхоТ
Т
пр.
Это значение Q
„ через ключ Взад
12 поступает на регулятор 6, который воздействует на блок 7, что приводит к тому, что расход воздуха Qg(0) компрессорной станции становится равным Q . Режим работы эрлифта при этом мгновенно переводится на погружение об, в точку с. На протяжении всего вре времени Q :f t ё Т.,., расход воздуха
Р поддерживают равным Qg Qg, . Так
как приток среды 0.(0) - Q больше подачи эрлифта Q, в точке с, то относительное погружение увеличивается по линии cd. По истечении времени Т„р режим работы эрлифта переводится в точку d на погружение - . Величина притока Qp(0) становится равной Q-i и блок 1 1 выдает заданный расход
«Э1
что приводит к переводу
ь,ал режима работы из точки d в точку Ъ на погружении об.., , На этом операции по изменению режима работы заканчиваются.
При необходимости обратного перехода из точки Ъ в точку а (такая необходимость возникает при изменении прогнозируемого значения притока с Qg на Q, ).работа осуществляется
аналогично.
в этом случае
Переход осуществляется по линии Ъ
г
При работе эрлифта в точке Ъ и при изменении прогнозируемого приток
m п а. /
Qn(T) среды с Qg,, на
мак
;Э2 - П макс
срабатывает третий компаратор 15 и на его выходе вместо нулевого сигнала устанавливается максимальный сигнал,- воздействующий на регулятор 6,
10
fS
20
25 -
30
35
40
а
50
с
.55
что природи.т к установлению максимального расхода воздуха Qg компрессорной станции 5, Рабочая точка при этом переводится из точки Ъ в точку k на погружении oi. . Так как подача эрлифта Q. в точке k больше
текущего притока гидросмеси, равного Qn(0) Q., то происходит откачка
среды из зумпфа с максимально возмолг- ным быстродействием. К моменту времени t Tnps когда к эрлифту будет направлен максимальный приток Qn ..
WoKC /
относительное погружение снизится до величины ci р (точка h), и при существовании этого максимального притока в течение максимально возможного времени Т Tfl вйовь увеличится и
Я fAQKC
достигнет в момент t симального значения tJL
TO
«а«
(точка g).
макс
Taки образом, з-аблаговременно откачанной емкостью от до ot, будет скомпенсирован максимальньй приток среды, т.е. выполнено ограниче-
ние oi. oi
макс
При определении блоком 9 заданного погружения рб(Т), величина которого больше Ы)д, , срабатывает компаратор 13 воздействует на управляющий вход ключа 10, выход которого при. этом подключается к второму входу, т.е. в качестве заданного погружения 6i,(T) в этом случае берется максималь ное погружение об ,лакс
Это способствует надежной работе
подъема, когда ui
При определении блоком 11 заданного расхода воздуха ЯвзЬд величина 45 которого меньше Qg , срабатывает
компаратор 14, воздействует на управ ляющий вход ключа 12, выход которого при этом подключается к второму входу (к блоку 16), т.е. в качестве
заданного расхода QegoA яук-а в этом случае берется минимально воз- мож1шй из условия транспорта эрлифтом 2 твердого материала расход
Вмин
Таким образом, предлагаемый способ управления эрлифтом за счет изменения режима: работы подъема в зависимости от прогнозируемого притока среды позволяет снизить затраты электроэнергии в установившемся и переходном режимах работы.
Формула изобретен И я
Способ управления эрлифтом, заключающийся в измерении расхода среды у источника и у эрлифта, глубины погружений подъемной трубы эрлифта, расхо- да газа, определения по расходу среды у источника ожидаемого расхода ере-
Q.
58646
ды у эрлифта и измерение времени прохождения среды от источника до эр- лифта с последующим переводом эрлиф та на граничное погружение при превышении ожидаемого расхода среды над максимальной подачей эрлифта, отличающийся тем, что, с целью повышения КПД эрлифта при изменении значения ожидаемого расхода среды, определяют заданное погружение и осуществляют перевод эрлифта на заданное погружение за время прохолг- дения среды от источника до эрлифта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления эрлифтом | 1985 |
|
SU1341394A1 |
| Устройство для управления компрессорной станцией эрлифтного гидроподъема | 1981 |
|
SU1060813A1 |
| Устройство для регулирования уровня жидкости в емкости | 1978 |
|
SU723527A1 |
| Способ управления эрлифтом | 1986 |
|
SU1495526A1 |
| Способ сооружения бесфильтровой скважины | 1989 |
|
SU1710707A1 |
| Эрлифтная установка | 1982 |
|
SU1086236A1 |
| Устройство для контроля подачи эрлифта | 1985 |
|
SU1278816A1 |
| Устройство для управления гидроподъемной системой | 1989 |
|
SU1655886A1 |
| СПОСОБ РАЗРАБОТКИ КИМБЕРЛИТОВЫХ ТРУБОК В СЛОЖНЫХ ГИДРОГЕОЛОГИЧЕСКИХ УСЛОВИЯХ | 2001 |
|
RU2258810C2 |
| Устройство для автоматического регулирования режима обжатий на обжимных станах | 1986 |
|
SU1391746A1 |
Изобретение касается управления эрлифтными установками и позволяет повысить КПД установки. Для этого измеряют расход среды у источника и у эрлифта (э), глубину погружения подьемной трубы Э и расход газа. По значению расхода среды у источника определяют ожидаемый расход среды у Э и измеряют время прохождения среды от источника до Э с последующим переводом Э на граничное погружение, если ожидаемьш расход среды превышает максимальную подачу Э. При изменении значения ожидаемого расхода среды определяют заданное погружение и переводят Э на заданное погружение за время прохождения среды от источника до Э. В результате обеспечивается надежная работа Э, когда постоянно сохраняются условия транспортирования Э твердого материала, исключающие его засорение и аварийную остановку.- За счет изменения режима работы подъема в зависимости от прогнозируемого притока среды снижаются затраты электроэнергии в установившемся и переходном режимах работы. 2 ил. с W
Qn(0)
cl-макс
V %; фиг. г.
fftoKc dg
| Способ автоматического регулирования расхода сжатого воздуха многоступенчатой эрлифтной установки | 1978 |
|
SU687267A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ откачки среды из шахты | 1983 |
|
SU1160125A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
