Изобретение относится к устройствам точного управления движением научно-исследовательских судов для проведения геолого-геофизических работ с использованием буксируемых сейсмических пьезокос в качестве носителей приемников первичной ИИформации сейсморазведки и, в особенности, при автоматическом удержании иаучио-исследовательского судна на заданной линии профиля, без внесения устройством дополннтельных шумов в пьезоприемники. обеспечивая надежность и безопасность работы с сейсмопьезокосами, в частности для проведения сейсмической разведки с использоваиием сейсмических пьезокос большой длины (порядка 3000 м и более), что предъявляет повышенные требования к сглаженности траектории движения научно-исследовательских судов. Известно устройство для стабилизации судна на заданном курсе (авторулевой), содержащее датчик требуемого значения курсового угла, датчик истинного значения курсового угла, устройство сравнения, регулятор, нуль-орган, исгголнительиое устройство, рулевую машину, руль и датчик обратной связи по положению руля (Ij/ Испол1 зование данного устройстйа для стабилизации судна с сейсмопьезокосой на курсе, совпадающем с направлением задан нОго профиля, позволяет свести колебания курса судна к минимуму и тем самым с одной стороны снизить уровень собственных шумов в приемных устройствах, с другой стороны - исключить перегрузки в косе. Недостаток устройства - недостаточная для проведения морских геологоразведоч иых работ точность удержання судна на заданной линии профиля из-за отсутствия компенсации бокового сноса судна за счет внешних воздействий, действующих по нор Мали к стабилизируемому курсу. Наиболее близким техиическйм решением к изобретению является устройство для стабнлизацни судна на заданной линии профи1Я, содержащее радионавигационные дат 4ИКИ курса, скорости, отклонения судна от заданного курса, гкфвый блок сравнения, второй блок сраннеиня, регулятор курса, исполнительный механиш (2J
Такое устройство позволяет обеспечивать стабилизацию судна на задаиной линии профиля с высокой точностью и обеспечивает решение ряда геолого-геофизических задач управления движением.
Недостатки такого устройства - возможность колебаний курса судиа в пределах, достаточных для возникновения в пьезоприемниках дополнительных шумов, что ведет к снижению точности и эффективности сейсморазведки; колебания курса обуславливают также возрастание натяжения в сейсм6кос е, что в конечном итоге может привести к ее обрыву; не обеспечена безопасная эксплуатация устройства при удержании судна с сейсмопьезокосой в случаях возрастания уровня помех по каналам радиосвязи или увеличения , периода дискретности обновления информации выше критического значё йия, что мОжет привести к повреждению сейсмопьезокосы судном.
Цель изобретения - повышение точности и надежности устройства.
Поставленная цель достигается тем, что устройство содержит датчик внешних возмущений, задатчик ширины коридора Хода судна, задатчик курса и последовательно ; с Ъ&дИпенные датчик максимального натяжения сейсмопьезокосы, вычислитель, ключ, блок памяти и сумматор, выход которого соединен с первым входом второго блока сравнения, а второй вход - с выходом задатчика курса, первый вход первого блока сравнения подключен к выходу задатчика ширины коридора хода сулна, второй вход - к выходу датчика отклонения судна от. заданного курса и ко второму входу вычислителя, а вы ход - ко второму входу ключа, выходы скорости связаны соответствеяно с первым входом датчика отклонения судна от заданного курса и с третьим входом вычис лителя, к четвертом у входу которого подключен датчик внешних возмущений, а вы ходы датчика курса подключены соответственно ко второму входу датчика отклонения судна от заданного курса и ко второму входу второго блока сравнения, выход которого через регулятор курса подключен к исполнительному механизму.
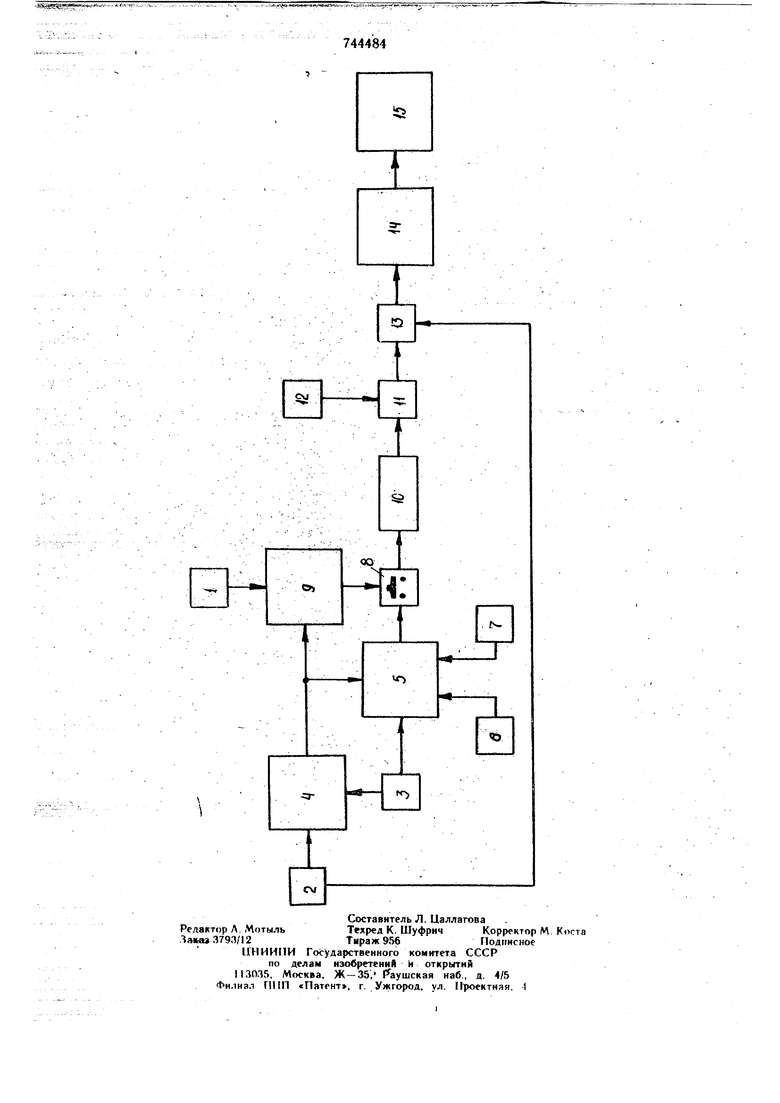
На чертеже представлена блок-схема устройства.
Устройство содержит задатчик 1 ширины коридора хода судна, датчик 2 курса, датчик 3 скорости и датчик 4 сугклонения судна от заданного курса. Сигналы с датчика 3 скорости и датчика 4 отклонения судна от заданного курса поступают в вычислитель 5 градусных поправок, на два дру - Plp(- g хода которого пода н Ь1 си гн алы с датчика 6 максимального натяжения сейсмопьезоксх-ы и датчики 7 внешних возмущений, а выходной сигнал вычислителя 5 через ключ 8. управляемый первым блоком 9 срав ЙГёШСна входы которого подключены выход
задатчика 1 ширины коридора хода судна и выход датчика 4 отклонения судна от заданного курса, подан на блок 10 памяти, выход которого соединен со входом сумматора il, на,второй вход которого подан сигнал с задатчика 12 курса, выход же сумматора 1 подключен к первому входу второго блока 13 сравнения, на второй вход ко торого поступает сигнал с датчика 2 курса, выход же второго блока 13 сравнения, в свою очередь, подключен ко входу регулятора 14 курса, выходной сигнал которого является входным для исполнительного механизма 15.
...-
Устройство работает следующим образом.
,. В процессе движения судна текущие значения курсового угла У кет. от датчика 2 и скорости движения судна от датчика 3 поступают в датчик 4 отклонения судна от заданной линии профиля, который на их основе вырабатывает значения счисляемых
координат судна, а по данным радионавигационной системы определяет обсервованные значения этих же координат и после их совместной обработки выдает в первый блок 9 сравнения и в вычислитель 5 истинные значения отклонения судна от заданной линии профиля Лу. Одновременно с этим вычислитель 5 градусной поправки определяет минимальное значение градусной поправки к курсу, необходимой для возвращения судна на заданную линию профиля, т. е,
Д niin скорости движения судна, которая определяется датчиком 3 скорости, и с учетом внешних сил, вызывающих снос судна в направлении, перпендикулярном ieкущему значению стабилизируемого курса,
J Величина этих сил определяется датчиком 7. Значение ширины коридора, с которого нужно возвращать судно на заданную линию профиля для вычислителя 5 является «плавающим, т. е. совпадающим с текущим значением отклонения судна Лу. Это позволяет,
о не вводя каких-либо изменений в вычисли-™ тель 5.. менять значение ширины коридора ц, выдаваемого задатчиком 1. Постоянная оценка динамических нагрузок на сейсмокосу за счет датчика 6 ее максимального натяжения позволяет сформировать функцию f f(T J). Откорректированное с учетом значения функции f значение и min виде поправки дУс выхода вь(числителя 5 поступает на ключ 8. Ключ управляется первым блоком 4 сравнения в соответствии со зНаче0 нием величины Луо Если Луо 0, то ключ разомкнут (судно находится в коридоре), если же , то ключ замыкается и вычислитель через блок 10 памяти начинает выдавать градусную поправку в
J сумматор П. Причем запоминающее устройство всегда хранит последнее значение градусной поправки, стирая предыдущее. На второй вход сумматора 11 с задатчика 12 курса постоянно подается направление про филя, характеризуемого углом %f. На выходе сумматора формируется значение нового требуемого стабилизированного угла курса тр - Yfip + А, которое во втором блоке 13 сравнения сравнивается .с истинным курсовым углом Уист. и выделяет на своем выходе сигнал их рассогласования . - Vrp . Регулятор 14 курса совместно с исполнительным механизмом 15 переводят судно на новый курс и стабилизируют его на новом курсе. Судно возвращается в коридор, ключ 8 размыкается и с этого момента значение курсовой поправки Д постоянное по величине подается с выхода блока 10 памяти в сумматор П. Таким образом, в работе устройства можно выделить два режима. Первый - судно находится в заданном коридоре, когда оно. стабилизируется на курсе, величина которого практически неизменна, и второй - когда судно выходит на границу коридора, в этом случае устройство плавно переводит судно на новый курс, компенсируя силы сноса судна и возвращая его на заданную линию профиля. Благодаря тому, что коррекция курса судна осуществляется эпизодически (в случаях выхода судна из коридора) и с учетом ограничений исключаются постоянные колебания курса, вызывающие возрастание собственных шумов в пьезоприемниках и увеличение нагрузок в косе. Исключается возможность повреждения косы судном в случае возрастания периода обновления информации об отклонении от ЗЛП или рост щумов по линиям радиосвязи, так как в этом случае устройство продолжает стабилизировать судно на курсе, соответствующем последнему значению градусной поправки. Применение пред.чагаемого устройства позволяет осуществлять точное и плавное Движение судна и буксируемой сейсмопьезокосы по заданной линии профиля и обеспевход - к выходу датчика отклонения судна от заданного курса и ко второму входу вы числителя, а выход - ко второму входу ключа, выходы датчика скорости связаны соот-. чивать при этом безопасность и надежность буксировки. Формула изобретения Устройство для автоматической стабилизации судна с буксируемой сейсмопьезокосой на заданной траектории, содержащее Датчики курса, скорости, отклояения судна от заданного курса, первый блок сравнения, второй,блок сравнения, регулятор курса и исполнительный механизм, отличающееся тем, что, с целью повышения точности и надежности устройства, оно содержит датчик внещних возмущений, задатчик ширины коридора хода судна, задатчик курса и последовательно соединенные датчик максимальиого натяжения сейсмопьезокосы, вычислитель, ключ, памяти и сумматор, выход которого соединен С первым входом второго блока сравнения, а второй вход - с выходом задатчика курса, первый вход первого блока сравнения подключен к выходу задатчика ширины коридора хода судна, второй ветственно с первым входом датчика отклонения судна от заданного курса и с третьим входом вычислителя, к четвертому входу которого подключен датчик внещних возмущений, а выходы датчика курса подключены соответственно ко второму входу датчиНа отклонения судна от заданного курса и КО второму входу второго блока сравнения, выход которого через регулятор курса подключен к исполнительному механизму. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ № 2110391, кл. G 05 D 1/02, 1975. 2,Авторское свидетельство CCCF по заявке № 2407078, кл. G 05 D 1/00, 27.06.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления курсом судна | 1989 |
|
SU1716485A1 |
| СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583350C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПУТЕВОЙ СИСТЕМЕ КООРДИНАТ С ПРИВОДОМ ПОВОРОТА АППАРАТУРЫ НАБЛЮДЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497728C2 |
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2579384C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| Гироскопическое устройство для определения курса | 1989 |
|
SU1783302A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Система стабилизации бурового судна | 1986 |
|
SU1360405A1 |