СП DD СП sl
СО
ю
3 158
Изобретение относится к автоматике, а именно к технике измерения параметров передаточных функций линейных динамических звеньев систем автомати- зированного управления, и может быть использовано для определения пара(ет- ров линейных динамических звеньев, широко применяемых в различных отраслях промышленности при исследовании и налддке систем автоматизации.
Целью изобретения является расширение области применения.
Для этого через равные промежутки времени С с.пустя время t после пода чи тестового сигнала на вход исследуемого объекта с передаточной функцией
(p).
Т-,р+1
(1)
20
25
30
Ф1жеируются три значения Ур,У,У переходной характеристики, причем /3 Г выбирается из соотношения , где tnp - предполагаемое время переходного процесса. После этого вычисляются разностные сигналы 4У,- У;-У1-1 ,2 и вспомогательньй коэффициент 1сд 4У2//1у,, пр которым определяется постоянная времени знаменателя Т () и коэффициент усиления k(y/+koy,)/(k,+ 1). Задаваясь величиной шага дискретности Г из соотношения где 1П 1,2,3,..., последовательно определяют величины z{n 3 по рекуррентной формуле Z Си Z п-1 , что соответ-, 35 ствует движению по кривой переходной характеристики с шагом сР от момента времени + Моменту начала переходного процесса при (j-k,
tmf 1 причем R -Л - Г-. На каждом шаге ре ft шения формируется сигнал Ug контроля,
пропорциональный временному интервг - лу S tg+4 2-n $ , где ,1,2,... -порядковый номер шага, и проверяется неравенство , где сигнал Ug пропорционален временному интервалу , определяющему точность определения zfpl. В случае, когда на предыдущем
40
45
На фиг. 1 приведена структурная схема .устройства} на фиг. 2 - блок памяти; на фиг. 3 - блок формирования разностных сигналов; на фиг. 4 - блок решения рекурректньпс уравнений; на фиг. 5 - блок формирования сигнала контроля; на фиг. 6 - формирователь входного сигнала; на фиг. 7 - измеритель интервалов времени; на фиг. 8 - реле времени; на фиг. 9 - блок памяти; на фиг. 10 - вычислитель; на фиг. 11 - формирователь контрольного сигнала; на фиг. 12 - блок определения постоянной времени числителя.
Устройство для определения параметров передаточной функции линейного динамического объекта (фиг. 1) содержит исследуемый объект 1, формиро- ва.тель 2 входного сигнала, синхронизатор 3, измеритель 4 интервалов времени, компаратор 5, вычислитель 6, блок 7 решения рекуррентных уравнений, блок 8 памяти, блок 9 формирования разностных сигналов, блок 10 формирования сигнала контроля, блок 11 определения постоянной времени числителя, блок 12 индикации.
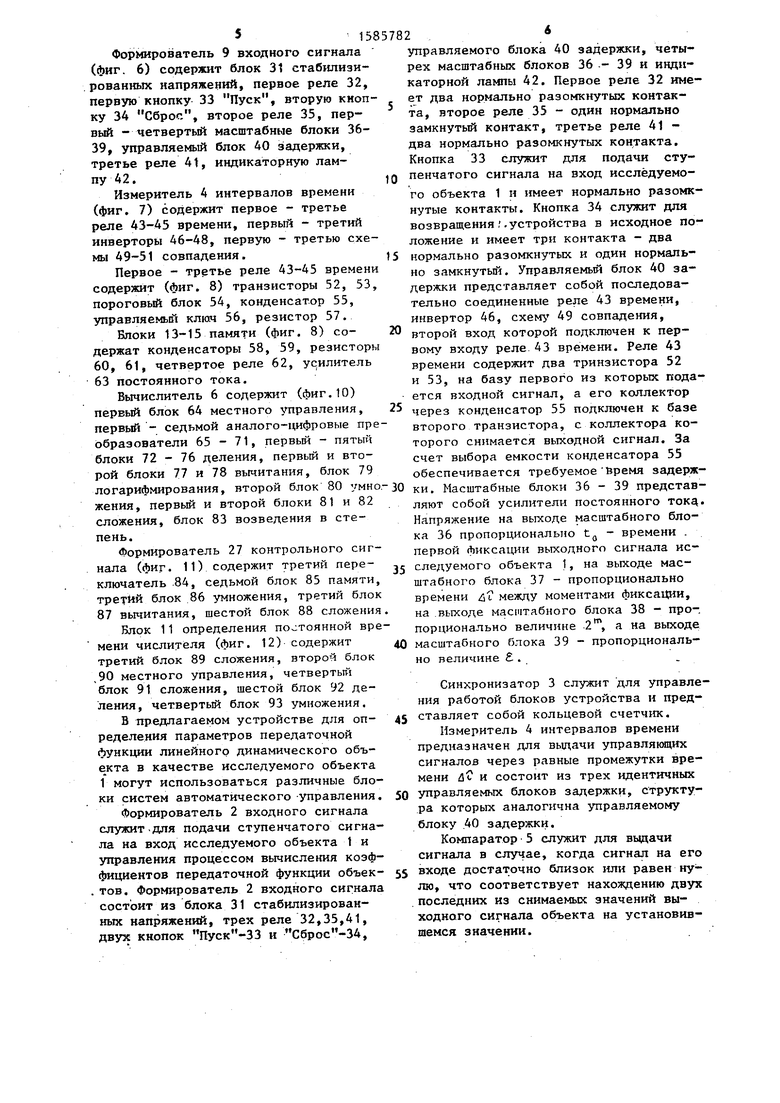
Блок 8 памяти (фиг. 2) содержит первый - третий блоки 13-15 памяти.
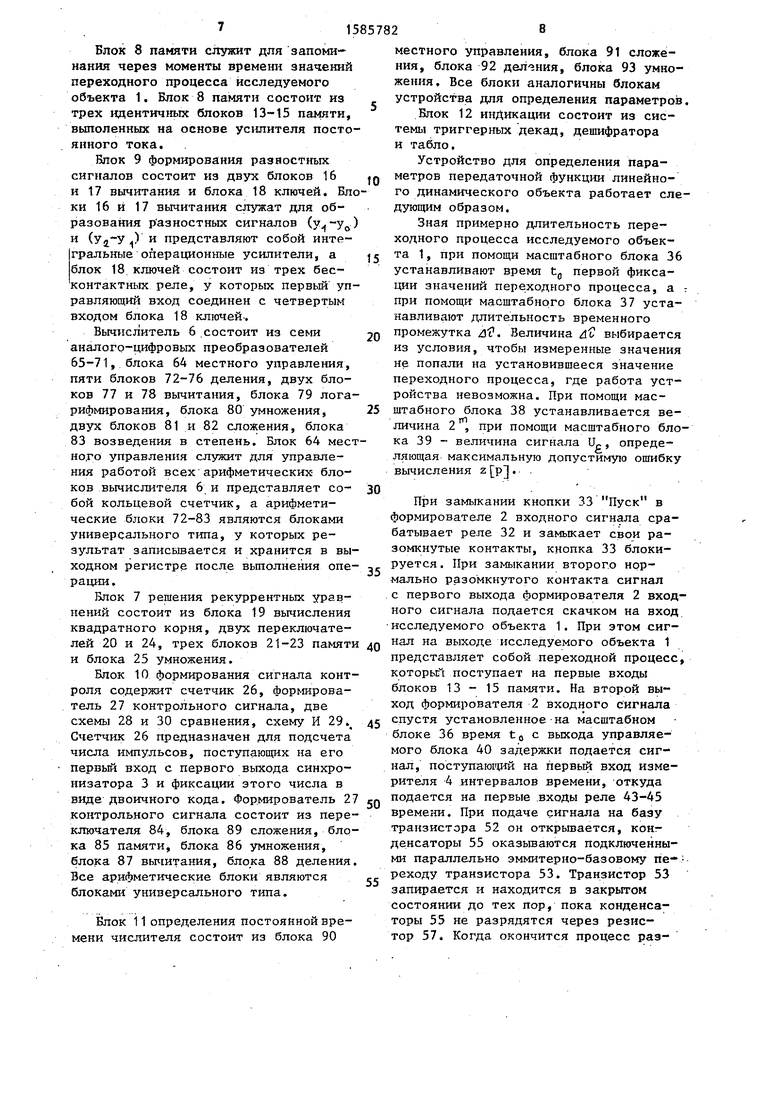
Блок 9 формирования разностных сигналов (фиг. 3) содержит первый и второй блоки 16 и 17 вычитания, блок 18 ключей.
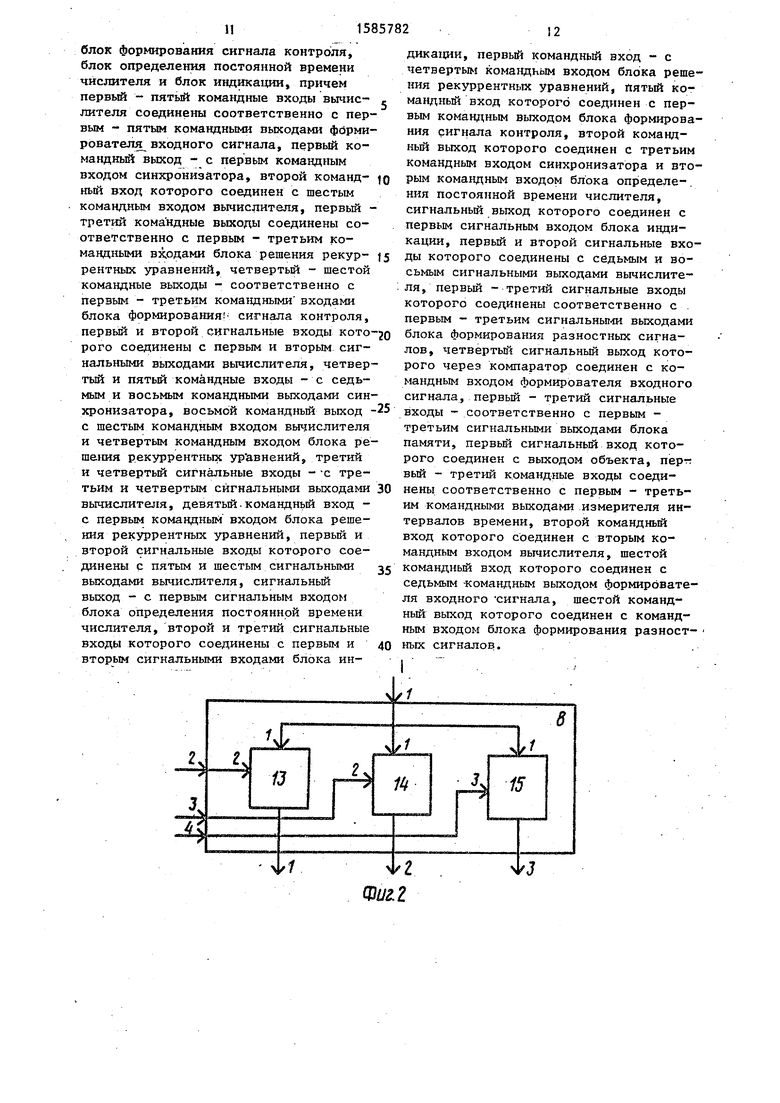
Блок 7 решения рекуррентных уравнений (фиг. 4) содержит блок 19 вычисr:b:z- r :: :x -v
шаг сР уменьшается вдвое, а процесс восстановления повторяют, начиная с , увеличивая п на единицу до тех пор, пока не выполнится неравенство 55 и по величине определяетки 21-25 памяти, второй переключатель 24, первьй блок 25 умножения.
,
ся параметр
Т. stgJi T,
(2)
Блок 10 формирования сигнала контроля (фиг.5) содержит счетчик 26, фор мирователь 27 контрольного сигнала, первую схему 28 сравнения, схему И 29 вторую схему 30 сравнения.
д
з
0
25
30
35
40
45
Теоретическими предпосылками работы устройства являются вьфажения, полученные в результате отображения решений непрерывного дифференциального уравнения, соответствующего передаточной функции (1), наблюдаемые в дискретные моменты времени через интервалы ЛС, на множество соответствующих им. дискретных уравнений. При этом для рассматриваемого класса объектов связь между дискретными и Непрерывными уравнениями осуществляется с помощью коэффициента kj,.
На фиг. 1 приведена структурная схема .устройства} на фиг. 2 - блок памяти; на фиг. 3 - блок формирования разностных сигналов; на фиг. 4 - блок решения рекурректньпс уравнений; на фиг. 5 - блок формирования сигнала контроля; на фиг. 6 - формирователь входного сигнала; на фиг. 7 - измеритель интервалов времени; на фиг. 8 - реле времени; на фиг. 9 - блок памяти; на фиг. 10 - вычислитель; на фиг. 11 - формирователь контрольного сигнала; на фиг. 12 - блок определения постоянной времени числителя.
Устройство для определения параметров передаточной функции линейного динамического объекта (фиг. 1) содержит исследуемый объект 1, формиро- ва.тель 2 входного сигнала, синхронизатор 3, измеритель 4 интервалов времени, компаратор 5, вычислитель 6, блок 7 решения рекуррентных уравнений, блок 8 памяти, блок 9 формирования разностных сигналов, блок 10 формирования сигнала контроля, блок 11 определения постоянной времени числителя, блок 12 индикации.
Блок 8 памяти (фиг. 2) содержит первый - третий блоки 13-15 памяти.
Блок 9 формирования разностных сигналов (фиг. 3) содержит первый и второй блоки 16 и 17 вычитания, блок 18 ключей.
Блок 7 решения рекуррентных уравнений (фиг. 4) содержит блок 19 вычис
ки 21-25 памяти, второй переключатель 24, первьй блок 25 умножения.
Блок 10 формирования сигнала контроля (фиг.5) содержит счетчик 26, фор-- мирователь 27 контрольного сигнала, первую схему 28 сравнения, схему И 29, вторую схему 30 сравнения.
Формирователь 9 входного сигнала (фиг. 6) содержит блок 31 стабилизированных напряжений, первое реле 32, первую кнопку 33 Пуск, вторую кнопку 34 Сброс, второе реле 35, первый - четвертый масштабные блоки 36- 39, управляемый блок 40 задержки, третье реле 4t, индикаторную лампу 42 .
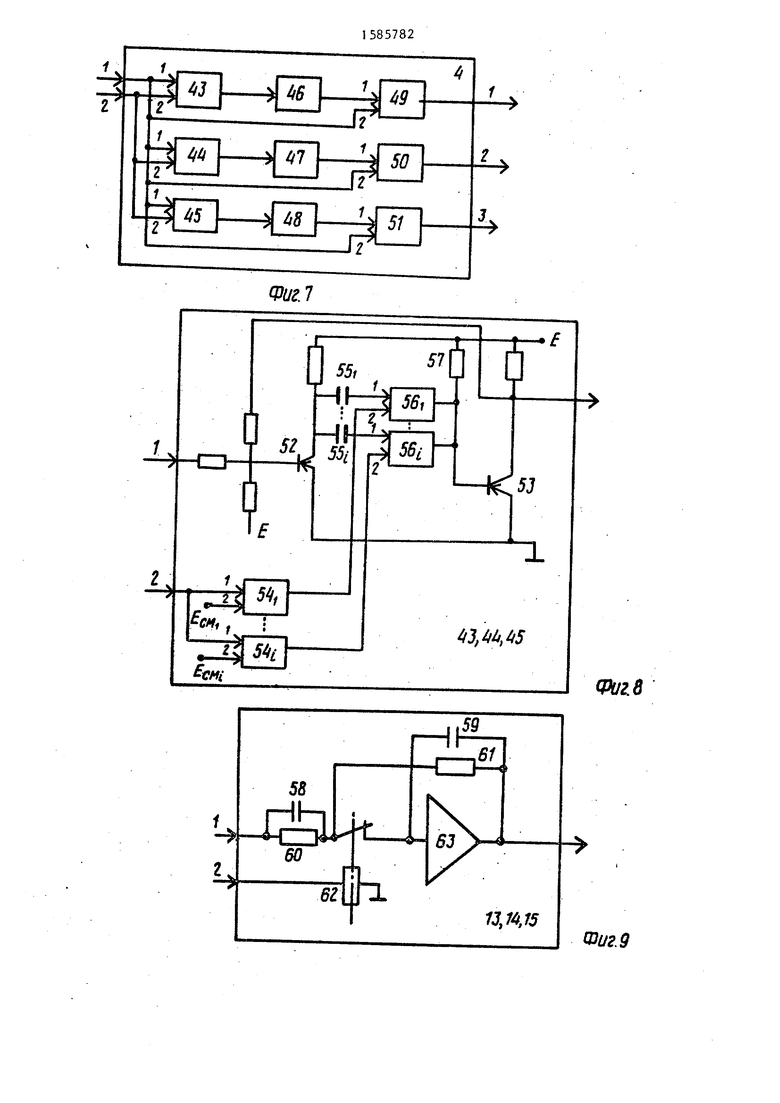
Измеритель 4 интервалов времени (фиг. 7) содержит первое - третье реле 43-45 времени, первьпЧ - третий инверторы 46-48, первую - третью схемы 49-51 совпадения.
Первое - третье реле 43-45 времени содержит (фиг. 8) транзисторы 52, 53, пороговый блок 54, конденсатор 55, управляемый клюм 56, резистор 57.
Блоки 13-15 памяти (фиг. 8) содержат конденсаторы 58, 59, резисторы 60, 61, четвертое реле 62, усилитель 63 постоянного тока.
Вычислитель 6 содержит (фиг.10) первый блок 64 местного управления, первый - седьмой аналого-цифровые преобразователи 65 - 71, первый - пятый блоки 72 - 76 деления, первый и второй блоки 77 и 78 вычитания, блок 79
10
управляемого блока 40 за чержки, четырех масштабных блоков 36 .- 39 и индикаторной лампы 42. Первое реле 32 имеет два нормально разомкнутых контакта, второе реле 35 - один нормально замкнутый контакт, третье реле 41 - два нормально разомкнутых контакта. Кнопка 33 служит для подачи ступенчатого сигнала на вход исследуемого объекта 1 и имеет нормально разомкнутые контакты. Кнопка 34 служит для возвращения,.устройства в исходное положение и имеет три контакта - два нормально разомкнутых и один нормально замкнутьй. Управляемый блок 40 задержки представляет собой последовательно соединенные реле 43 времени, инвертор 46, 49 совпадения, второй вход которой подключен к первому входу реле. 43 времени. Реле 43 времени содержит два тринзистора 52 и 53, на базу первого из которых подается входной сигнал, а его коллектор 25 через конденсатор 55 подключен к базе второго транзистора, с коллектора которого снимается выходной сигнал. За счет выбора емкости конденсатора 55 обеспечивается требуемое бремя задерж15
20
логарифмирования, второй блок ВО умно-ЗО кн. Масштабные блоки 36 - 39 представжения, первый и второй блоки 81 и 82 сложения, блок 83 возведения в степень.
Формирователь 27 контрольного сигнала (фиг. 11) содержит третий переключатель 84, седьмой блок 85 памяти, третий блок 86 умножения, третий блок 87 вычитания, шестой блок 88 сложения.
Блок 11 определения постоянной вре- мени числителя (фиг. 12) содержит третий блок 89 сложения, второй блок ,90 местного управления, четвертый блок 91 сложения, шестой блок 92 деления, четвертый блок 93 умножения,
В предлагаемом устройстве для определения параметров передаточной функции линейного динамического объекта в качестве исследуемого объекта 1 могут использоваться различные блоки систем автоматического управления.
Формирователь 2 входного сигнала служит.для подачи ступенчатого сигнала на вход исследуемого объекта 1 и управления процессом вычисления коэффициентов передаточной функции объек- . тов. Формирователь 2 входного сигнала состоит из блока 31 стабилизированных напряжений, трех реле 32,35,41, двух кнопок и Сброс -34,
ляют собой усилители постоянного токд. Напряжение на выходе масштабного блока 36 пропорционально времени . первой фиксации выходного сигнала ис35 следуемого объекта 1, на выходе масштабного блока 37 - пропорционально времени 4 между моментами фиксации, на выходе масштабного блока 38 - про-. порционально величине 2, а на выходе
40 масштабного блока 39 - пропорционально величине ..
45
50
55
Синхронизатор 3 служит для управления работой блоков устройства и представляет собой кольцевой счетчик.
Измеритель 4 интервалов времени предназначен для выдачи управляющих сигналов через равные промежутки времени dC и состоит из трех идентичных управляемых блоков задержки, структура которых аналогична управляемому блоку 40 задержки.
Компаратор 5 служит для вьщачи сигнала в случае, когда сигнал на его входе достаточно близок или равен нулю, что соответствует нахождению двух последних из снимаемых значений выходного сигнала объекта на установившемся значении..
5782
10
управляемого блока 40 за чержки, четырех масштабных блоков 36 .- 39 и индикаторной лампы 42. Первое реле 32 имеет два нормально разомкнутых контакта, второе реле 35 - один нормально замкнутый контакт, третье реле 41 - два нормально разомкнутых контакта. Кнопка 33 служит для подачи ступенчатого сигнала на вход исследуемого объекта 1 и имеет нормально разомкнутые контакты. Кнопка 34 служит для возвращения,.устройства в исходное положение и имеет три контакта - два нормально разомкнутых и один нормально замкнутьй. Управляемый блок 40 задержки представляет собой последовательно соединенные реле 43 времени, инвертор 46, 49 совпадения, второй вход которой подключен к первому входу реле. 43 времени. Реле 43 времени содержит два тринзистора 52 и 53, на базу первого из которых подается входной сигнал, а его коллектор 25 через конденсатор 55 подключен к базе второго транзистора, с коллектора которого снимается выходной сигнал. За счет выбора емкости конденсатора 55 обеспечивается требуемое бремя задерж15
20
ЗО кн. Масштабные блоки 36 - 39 представляют собой усилители постоянного токд. Напряжение на выходе масштабного блока 36 пропорционально времени . первой фиксации выходного сигнала ис35 следуемого объекта 1, на выходе масштабного блока 37 - пропорционально времени 4 между моментами фиксации, на выходе масштабного блока 38 - про-. порционально величине 2, а на выходе
40 масштабного блока 39 - пропорционально величине ..
5
0
5
Синхронизатор 3 служит для управления работой блоков устройства и представляет собой кольцевой счетчик.
Измеритель 4 интервалов времени предназначен для выдачи управляющих сигналов через равные промежутки времени dC и состоит из трех идентичных управляемых блоков задержки, структура которых аналогична управляемому блоку 40 задержки.
Компаратор 5 служит для вьщачи сигнала в случае, когда сигнал на его входе достаточно близок или равен нулю, что соответствует нахождению двух последних из снимаемых значений выходного сигнала объекта на установившемся значении..
Блок 8 памяти служит для запоминания через моменты времени значений переходного процесса исследуемого объекта 1. Блок 8 памяти состоит из трех идентичных блоков 13-15 памяти, вьшоленных на основе усилителя постоянного тока.
Блок 9 формирования разностных сигналов состоит из двух блоков 16 и 17 вычитания и блока 18 ключей. Блоки 16 и 17 вычитаьшя служат для об разования разностных сигналов () и ( J и представляют собой интегральные операционные усилители, а блок 18 ключей состоит из трех бесконтактных реле, у которых первый управляющий вход соединен с четвертым входом блока 18 .
Вычислитель 6 состоит из семи аналого-цифровых преобразователей 65-71, блока 64 местного управления, пяти блоков 72-76 деления, двух блоков 77 и 78 вычитания, блока 79 логарифмирования, блока 80 умножения, двух блоков 81 и 82 сложения, блока 83 возведения в степень. Блок 64 местного управления служит для управления работой всех арифметических блоков вычислителя 6 и представляет собой кольцевой счетчик, а арифметические блоки 72-83 являются блоками универсального типа, у которых результат записБшается и хранится в выходном регистре после вьшолнения операции.
Блок 7 решения рекуррентных уравнений состоит из блока 19 вычисления квадратного корня, двух переключателей 20 и 24, трех блоков 21-23 памяти и блока 25 умножения.
Блок 10 формирования сигнала контроля содержит счетчик 26, форьшрова- тель 27 контрольного сигнала, две схемы 28 и 30 сравнения, схему И 29. Счетчик 26 предназначен для подсчета числа импульсов, поступающих на его первьй вход с первого выхода синхронизатора 3 и фиксации этого числа в виде двоичного кода. Формирователь 27 контрольного сигнала состоит из переключателя 84, блока 89 сложения, блока 85 памяти, блока 86 умножения, блока 87 вычитания, блока 88 деления. Все арифметические блоки являются блоками универсального типа.
1Влок i 1 определения постоянной времени числителя состоит из блока 90
o
5
0
5
0
5
0
5
0
5
местного управления, блока 91 сложения, блока 92 дел-эния, блока 93 умножения. Все блоки аналогичны блокам устройства для определения параметр ois.
Блок 12 индикации состоит из системы триггерных декад, дешифратора и табло.
Устройство для определения Параметров передаточной функции линейного динамического объекта работает следующим образом.
Зная примерно длительность переходного процесса исследуемого объекта 1, при помощи масштабного блока 36 устанавливают время t первой фиксации значений переходного процесса, а - при помощи масштабного блока 37 устанавливают длительность временного промежутка t. Величина г1с выбирается из условия, чтобы измеренные значения не попали на установившееся значение переходного процесса, где работа устройства невозможна. При помощи масштабного блока 38 устанавливается величина 2 , при помощи масштабного блока 39 - величина сигнала IL, определяющая максимальную допустимую ошибку вычисления .
При замыкании кнопки 33 Пуск в формирователе 2 входного сигнала срабатывает реле 32 и замыкает свои разомкнутые контакты, кнопка 33 блокируется . При замыкании второго нормально разомкнутого контакта сигнал с первого выхода формирователя 2 входного сигнала подается скачком на вход исследуемого объекта 1. При этом сигнал на выходе исследуемого объекта 1 представляет собой переходной процесс, которьЕ поступает на первые входы блоков 13 - 15 памяти. На второй выход формирователя 2 входного сигнала спустя установленноена масштабном блоке 36 время to с выхода управляемого блока 40 задержки подается сигнал, поступаюгщй на первый вход измерителя 4 интервалов времени, откуда подается на первые .входы реле 43-45 времени. При подаче сигнала на базу транзистора 52 он открьтается, конденсаторы 55 оказываются подключенными параллельно эммитерно-базовому пе- реходу транзистора 53. Транзистор 53 запирается и находится в закрытом состоянии до тех пор, пока конденсаторы 55 не разрядятся через резистор 57. Когда окончится процесс раз
9
рядки конденсаторов 55, снова появится базовый ток транзистора 53, последний откроется, и сигнала на выходе не будет. Таким .образом, выдержка времени зависит от постоянной времени Количество конденсаторов 55 подключенных к схеме, определяется количеством сработавших ключей 56. Задержка сигналов измерителем 4 интервалов времени равна соответственно лС, , Зд-Г. По мере поступления сигналов на вторые входы блоков памяти 13-15 происходит срабатывание реле 62 и запоминание соответствующих значений переходного процесса.
Разность двух последних запомненных значений с выхрда блока 17 вычитания поступает на вход компаратора 5. В случае, если длительность про межутка времени г)( выбрана правильно, т.е. зафиксированные значения переходного процесса не попали на установившийся участок, появляется сигнал на выходе компаратора 5, реле 41 замыкает свои нормально разомкнутые контакты. Индикаторная лампа 42 загорается, и возникает сигнал управления на шестом выходе формирователя 2 входного сигнала, который, поступая на четвертый вход ьло- ка 18 ключей, приводит к срабатыванию ключей, после чего запомненные значения переходного процесса посту- пают на входы вычислителя 6, Затем по тому же сигналу управления происходит вычисление параметров- К и Т передаточной функции.
После окончания процесса ь гчисле- ния блок 64 местного управления выра батывает сигнал, поступающий на первый вход синхронизатора 3, и запускает егоо Синхронизатор 3, поочередно выдавая сигналы на входы управления, блоков 21,25,23,89,85,84, организует процесс вычисления значений величины
- t- ,л
с шагом дискретности 4 -fn и
15
сравнение величины сигнала контроля Ug t +/jC-n (f с нулем и величиной U. Процесс расчета будет продолжаться до тех пор, пока сигнал контроля Ug не станет меньше нуля, а условие не выполнится, в зтом случае о уменьшается вдвое, а число шагов п вычисления, фиксируемое счетчиком 26j сбрасывается, и расчет повторяется сначала, пока не вьтолнится неравенство . Тогда по последнему
to
15
де, е
о-ро- 40 45
25
50
j 585782 10
f
значению блоком 11 определения постоянной времени числителя вычисляется величина Т,которая вместе с К иТ вы- свечивается на табло блока 30 индикации.
В случае, если длительность временного промежутка f выбрана неправильно, сигнал на первом входе формирователя 2 входного сигнала не появляется и реле 41 не замыкает свои нормально разомкнутые контакты, индикаторная лампа 42 не загорается и управляющий сигнал .на входы блоков 12- 15 не поступает. В этом случае необходимо уменьшить величину 41 на выходе масштабного блока 37 и повторить эксперимент сначала. Повторный пуск возможен только после того, как объект 1 вернулся в исходное состояние. Для этого необходимо нажать кнопку 34 Сброс формирователя 2 входного сигнала, тогда снимается сигнал с обмотки управления реле 32, оно размыкает свои нормально разомкнутые контакты и отключает сигнал с входа исследуемого объекта 1. Одновременгю подается сигнал на седьмой выход формирователя 2 входного сигнала и передается на обнуляющие входы всех цифровых блоков устройства.
Преимущество предлагаемого устрой- ства заключается в возможности опреде- ления параметров числителя передаточной функции объекта, что существенно расширяет его область применения путем обеспечения возможности исследования широкого класса интегро-диффе- ренцирующих звеньев. При зтом достаточно получить всего три значения пе- реходной характеристики исследуемого ; объекта на любом ее участке,что существенно упрощает процедуру идентификации.
Формула изобретения. Устройство для определения параметров передаточной функции линейного динамического объекта, содержащее формирователь входного сигнала, первый сигнальный выход которого соеди-. нен с входом исследуемого объекта, а первый командный выход - с первым командным входом измерителя интервалов времени, а также компаратор и вычислитель, от. личающееся тем, что, с целью расширения области применения устройства, в него введены блок памяти, блок формирования разностных сигналов, синхронизатор, блок решения рекуррентных уравнений,
30
35
блок формирования сигнала контроля, блок определения постоянной времени числителя и блок индикации, причем первый - пятый командные входы вычислителя соединены соответственно с первым - пятым командными выходами фЬрми- рователя входного сигнала, первый командный выход - с первым командным входом синхронизатора, второй команд- |Q ный вход которого соединен с шестым командным входом вычислителя, первый - третий командные выходы соединены соответственно с первым - третьим кодикации, первый командный вход - с четвертым командным входом блока реше ния рекуррентных уравнений, Пятьй ко- мандньпЧ вход которого соединен с первым командным выходом блока формирова ния сигнала контроля, второй команд- ньщ выход которого соединен с третьим командным входом синхронизатора и вто рым командным входом блока определения постоянной времени числителя, сигнальный выход которого соединен с первым сигнальным входом блока индикации, первый и второй сигнальные вхо
мандными входами блока решения рекур- t5 ды которого соединены с седьмым и ворентных уравнений, четвертьй - шестой командные выходы - соответственно с первым - третьим комавдными входами блока формирования: сигнала контроля.
сьмым сигнальными выходами вычислителя, первый - третий сигнальные входы которого соединены соответственно с первым - третьим сигнальньп и выходами
сьмым сигнальными выходами вычислителя, первый - третий сигнальные входы которого соединены соответственно с первым - третьим сигнальньп и выходами
первый и второй сигнальные входы KOTO-JQ блока формирования разностных сигнадикации, первый командный вход - с четвертым командным входом блока решения рекуррентных уравнений, Пятьй ко- мандньпЧ вход которого соединен с первым командным выходом блока формирования сигнала контроля, второй команд- ньщ выход которого соединен с третьим командным входом синхронизатора и вторым командным входом блока определения постоянной времени числителя, сигнальный выход которого соединен с первым сигнальным входом блока индикации, первый и второй сигнальные входы которого соединены с седьмым и восьмым сигнальными выходами вычислителя, первый - третий сигнальные входы которого соединены соответственно с первым - третьим сигнальньп и выходами
блока формирования разностных сигна

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| Устройство для измерения чистого запаздывания инерционного звена | 1984 |
|
SU1236430A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Устройство для определения параметров динамического звена | 1987 |
|
SU1478194A1 |
| Устройство для определения параметров динамического звена второго порядка | 1984 |
|
SU1231489A1 |
| Устройство для определения параметров линейных динамических объектов | 1991 |
|
SU1837259A1 |
| Устройство для определения коэффициента усиления динамического объекта | 1984 |
|
SU1211700A1 |
| Анализатор частотных характеристик | 1985 |
|
SU1307373A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| Устройство для определения импульсной переходной функции | 1985 |
|
SU1345175A1 |



Изобретение относится к автоматике и обеспечивает автоматическое определение постоянных времени числителя, знаменателя и коэффициента усиления передаточных функций линейных динамических объектов. Целью изобретения является расширение области его применения. Для достижения цели в устройство введены блок 8 памяти, блок 9 формирования разностных сигналов, синхронизатор 3, блок 7 решения рекуррентных уравнений, блок 10 формирования сигналов контроля, блок 11 определения постоянной времени числителя, блок 12 индикации. 12 ил.
рого соединены с первым и вторым сигнальными выходами вычислителя, четвертый и пятый командные входы - с седьмым и восьмым командными выходами синхронизатора, восьмой командный выход -25 с шестым командным входом вычислителя и четвертым командным входом блока ре- ше1шя рекуррентных ур авнений, третий и четвертьй сигнальные входы - -с третьим и четвертым сигнальными выходами 30 нены соответственно с первым - третьим командными выходами измерителя интервалов времени, второй командньй вход которого соединен с вторым командным входом вычислителя, шестой 35 командньй вход которого соединен с
седьмым -командным выходом формирователя входного сигнала, шестой командньй выход которого соединен с командным входом блока формирования разностных сигналов.
вычислителя, девятьй-командньй вход - с первым командным входом блока решения рекуррентных уравнений, первьй и второй сигнальные входы которого соединены с пятым и шестым сигнальными выходами вычислителя, сигнальньй выход - с первым сигнальным входом блока определения постоянной времени числителя, второй и третий сигнальные входы которого соединены с первым и вторым сигнальными входами блока ин40
лов, четвертьй сигнальньй выход которого через компаратор соединен с командным входом формирователя входного сигнала, первьй - третий сигнальные входы - соответственно с первым - третьим сигнальными выходами блока памяти, первьй сигнальньй вход которого соединен с выходом объекта, пергг вьй - третий командные входы соедиФиг.3
ФигМ
6
1585782
Г 2 J 5 7
/
О1
/USC/Ш гб
Фг/г.5
Ю
/
О1
/USCgl/JXULUu
27
28
г /.
J
J
6
«7
I
5
-lf
Фг/г7
F
49
JP
50
Фиг.11
| Рабкин Г.Л | |||
| и др | |||
| Экспериментальное исследование судовых автоматических систем | |||
| Л.: Судостроение, 1966, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Авторское свидетельство СССР № 651511, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
