75
//////////////// /
(Л
со
со
Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышленных роботах, применяемых для подъема и переноса грузов.
Цель изобретения - снижение энергозатрат при подъеме груза за счет увели- чения точности уравновешивания.
На чертеже показана кинематическая схема устройства.
На основании 1 с по.мощью шарнира 2 установлено входное звено 3 пантографа, шарнирно соединенное с выходным звеном 4. Замыкающие пантограф стержни 5 и 6 также шарнирно соединены со звеньями 3 и 4 и друг с другом шарниром 7. В шарнире 7 смонтирован опорный ролик 8, размешенный в горизонтальной направляюш,ей 9 которая с рычагами 10 и 11 и с основанием 1 образует дополнительный и1арнир- но-рычажный параллелограмм. На конце выходного звена 4 с помоп ью шарнира 12 установлено захватное устройство 13 с дат- чиком нагрузки и система 14 управления. На стойке 1 установлен привод 15 ползуна 16 с направляющей 17, сквозь который пропущен стержень 18, подпружиненный пружиной 19 и прикрепленный с помощью шарнира 20 к рычагу 11.
Для уравновеп1ивания звеньев пантографа (без груза) служит пружинный механизм 21.
Сбалансированный манипулятор работает следуюп1им образом.
Оператор подводит захватное устройство 13 к грузу и с 11омоп1ью системы 14 управления включает привод 15, который перемещает ползун 16с направляющей 17 и, сжимая пружину 19, создает уравновешивающий момент, соответствующий весу груза. После достижения требуемого усилия датчик нагрузки включает привод 15. Шарниры 2, 7 и 12рабочие точки пантографа - лежат на одной прямой. П1)и переменхении захватного устройства 13 в горизонтальном направлении изменяется плечо груза относительно основания пропорционально расстоянию между шарнирами
5
0 Q 5
0
0
5
2 и 12, Но в той же пропорции изменяется расстояние между щарнирами 2 и 7 т. е. плечо реакции на шарнир 7, значит эта реакция остается такой же, как в начале перемещения. При вертикальном перемещении плечо груза относительно основания 1 не изменяется, следовательно, не изменяется и момент от веса груза. Плечо силы упругости пружины 19 относительно шарнира, соединяющего рычаг 11 и основание 1, изменяется, но обратно пропорционально этому изменяется и деформация пружины, т. е. сила упругости. Следовательно, уравновешивающий момент, создаваемый пружиной 19, также остается неизменным. Таким образом, манипулятор остается сбалансированным в любом положении. Оператор подводит захватное устройство 13 с грузом в требуемую точку и, включив привод 15, освобождает груз и раз- балансирует манипулятор, приводя его в исходное положение, в котором он сбалансирован без груза.
Формула изобретения
Сбалансированный манипулятор, содержащий основание, пшрнирно связанные с ним исполнительный механизм, выполненный в виде пантографа, в одном из щарни- ров которого смонтирован опорный ролик, и дополнительный шарнирно-рычажный параллелограмм с горизонтальной направляющей, в которой размещен указанный ролик, привод и систему управления, отличающийся тем, что, с целью снижения энергозатрат при подъеме груза за счет увеличения точности уравновещивания, основание снабжено ползуном с шарнирно связанной с ним направляющей и подпружиненным относительно нее стержнем, при этом стержень шарнирно связан с одним из рычагов дополнительного параллелограмма, привод кинематически связан с указанны.м ползуном, в пантограф снабжен захватным устройством с датчиком, который взаимодействует через систему управления с приводом.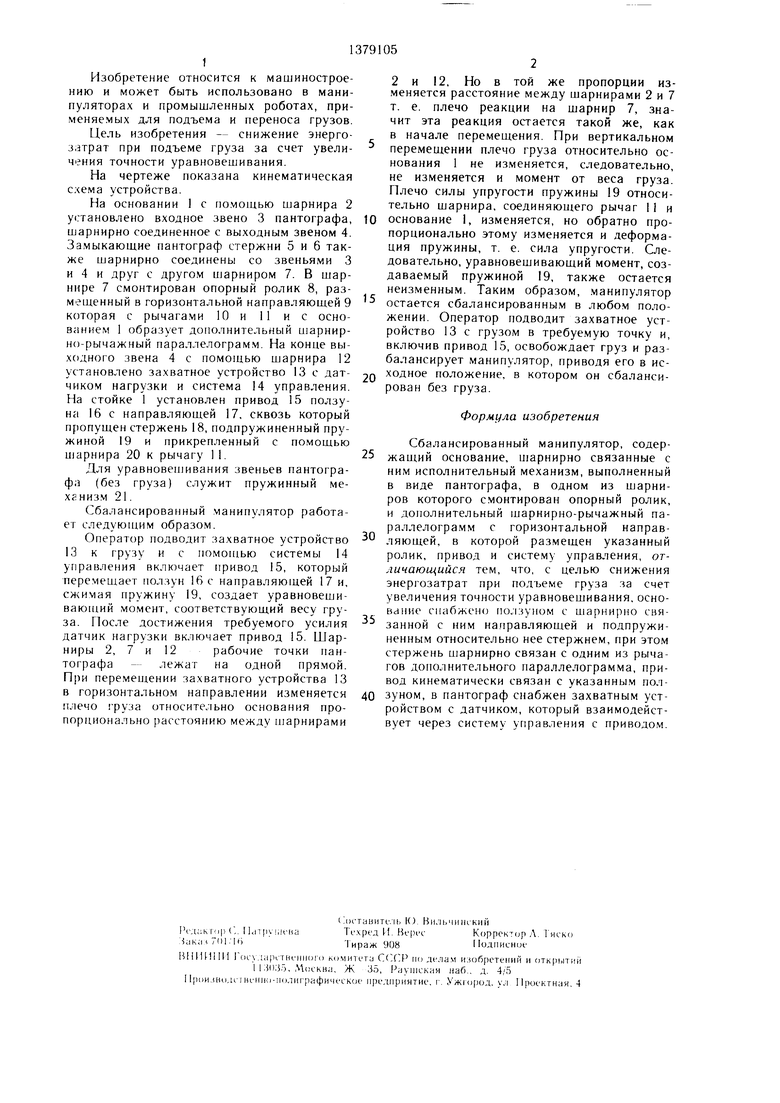
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1549747A1 |
| Манипулятор | 1986 |
|
SU1324843A1 |
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
| Сбалансированный манипулятор | 1987 |
|
SU1423367A1 |
| Уравновешенный манипулятор | 1988 |
|
SU1521579A1 |
| Сбалансированный манипулятор | 1989 |
|
SU1673432A1 |
| Манипулятор | 1984 |
|
SU1284822A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Манипулятор | 1984 |
|
SU1197832A1 |
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
Изобретение относится к области машиностроения и может быть использовано в манипуляторах и промышленных роботах, применяемых для подъема и переноса груза. Пель изобретения - снижение энергозатрат при подъеме груза за счет увеличения точности уравновешивания. При захвате груза включается привод 15, который перемещает ползун 16 с шарнирно связанной с ним направляющей 17 по основанию 1. При этом происходит деформация пружины 19 до величины, обеспечивающей уравновешивание груза, посте чего по команде от датчика, размещенного в захватном устройстве, привод 15 выключается и далее оператор перемещает груз в требуемую точку. 1 ил. Z1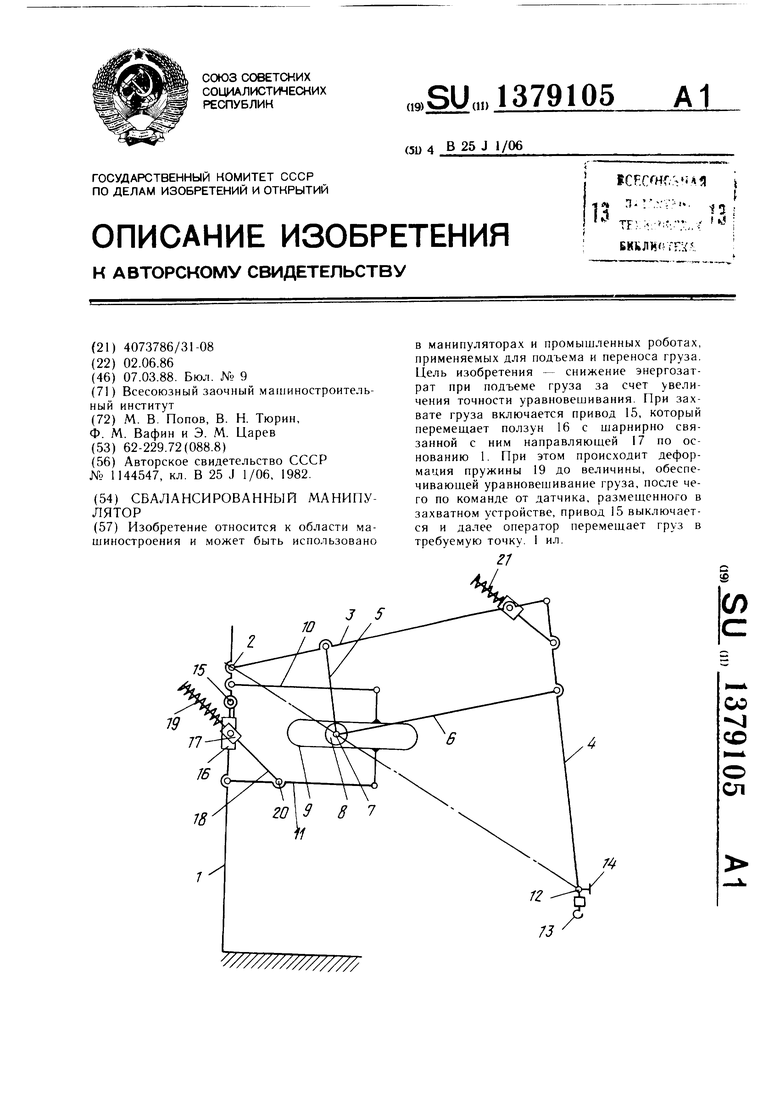
| Авторское свидетельство СССР № 1144547, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
