Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для перемещения грузов.
Цель изобретения - уменьшение энергозатрат оператора при манипуляции объектом вручную и уменьшение металлоемкости конст рукции путем выполнения размеров звеньев с уч,етом их деформации под нагрузкой.
, На .чертеже изображена кинематическая схема манипуляторам
; Манипулятор содержит корпус 1, установленный с возможностей поворота на основании 2. В корпусе 1 з&kfjeплeны вертикальные 3 и горизонтальные 4 направляющие. Грузовая стрела представляет собой параллелограммный механйзй со звеньями 5-8. На звеньях Этого механизма установлены ролик 9, размещенный в направляющей 4, и ролик 10, закрепленный на зубчатой рейке 11 - размещенный в направляющих 3, который через шестерню 12 связан с приводом 13. Звенья параллелограммного механизма стрелы связаны друг с другом посредством шарниров 14-17. На одном из звеньев закреплено захватное устройство 18с рукояткой 19 для манипулирования грузом. Масса подвижных частей стрелы уравновешивается пружиной 20. Захватное устройство 18 установлено на звене стрелы шарнирно на оси 21. Для уравновешивания груза оси щарниров 21 и 17 и ось ролика 10 должны лежать
в одной плоскости, что обеспечивается соотношением длин звеньев стрелы манипулятора. Одиако при нагружейии стрелы весом груза за счет упругих деформаций звеньев, с ось 21 шарнира смещается, что вызывает появление дополнительных усилий при горизонтальном перемещении груза.
Для устранения этого явления длина звена 5 выполняется меньшей по отношению к длине звена 7 на величину AL, определяео мую по формуле
д1,:(0-8 0.22)Р.а
где Р - масса груза;
а - длина звена параллелограммного механизма, противолежащего звену, связанному с приводом; с - жесткость рычага, связанного с грузозахватным устройством; L - длина звеиа параллелограммного механизма, связанного с приводом. Манипулятор работает следующим образом.
При захвате объекта захватным устройством 18 звенья стрелы манипулятора изменяют свою геометрию таким образом, что оси шарниров 21 и 17 и ось ролика 10 устанавливаются в одной плоскости, что обеспечивает уменьшение усилия оператора, необходимое для перемещения груза вручную.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор | 1989 |
|
SU1673432A1 |
| Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом | 2023 |
|
RU2835999C1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| КРАН | 2017 |
|
RU2734966C2 |
| Кран-манипулятор | 1980 |
|
SU922048A1 |
| Манипулятор | 1980 |
|
SU935450A2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
1. МАНИПУЛЯТОР, содержащий привод, основание, установленный на нем с возможностью поворота корпус, а также грузовую стрелу, выполненную в виде параллелограммного механизма, одно из звеньев которого связано с грузозахватным устройством, имеющим рукоятку для манипулирования объектом, а другое звено - с приводом, отличающийся тем, что, с целью уменьщения энергозатрат оператора при манипуляции объектом вручную и уменьщения металлоемкости конструкции, звено параллелограммного механизма, связанное с приводом, выполнено короче звена, ему проСО 00 00 N9 тиволежащего, на величину, соответствующую удлинению звена, связанного с приводом в пределах упругой деформации под нагрузкой. 2. Манипулятор по п. 1, отличающийся тем, что звено параллелограммного механизма, связанное с приводом, выполнено короче звена, ему противолежащего, на величину AL, определяемую по формуле 1 тР-а C-L где Р - масса груза; а - длина звена параллелограммного механизма, противолежащего звену, связанному с приводом; С - жесткость рычага, связанного с грузозахватным устройством; L - длина звена параллелограммного механизма, связанного с приводом; т 0,18-0,22.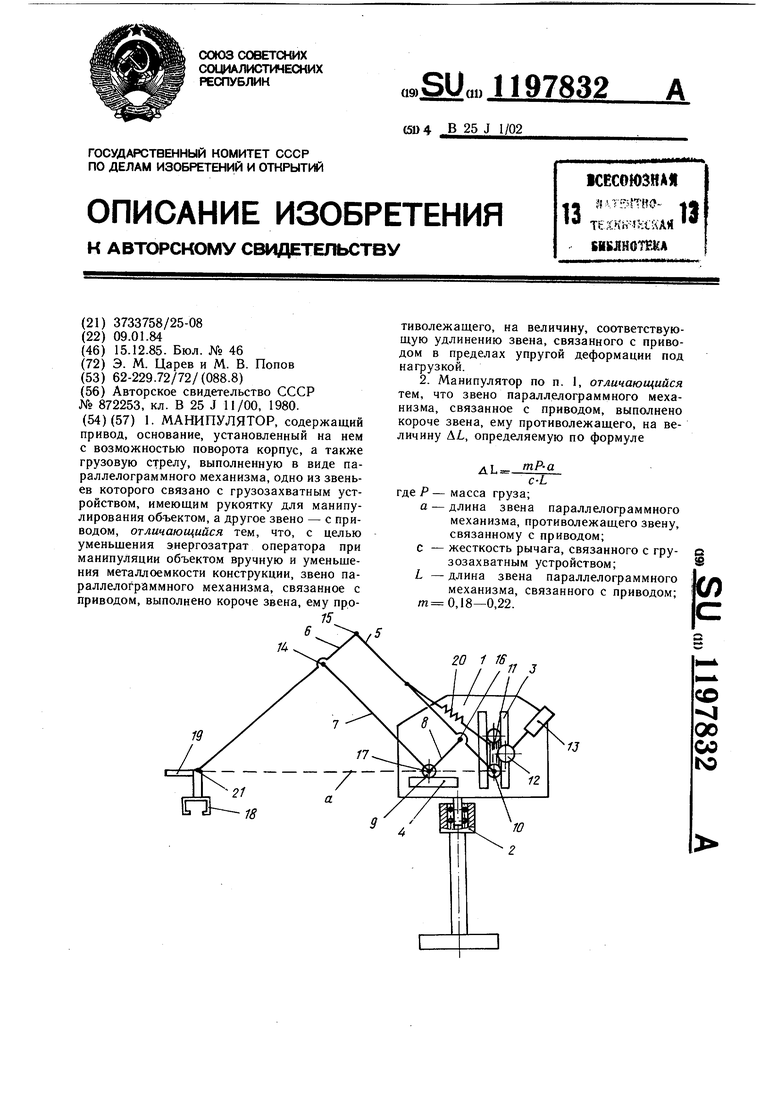
| Манипулятор | 1980 |
|
SU872253A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
