Изобретение относится к машиностроению и может быть использовано в погрузочных манипуляторах.
Цель изобретения - улучшение условий труда оператора за счет уменьшения сил трения в горизонтальных направляющих поворотного узла.
На чертеже изображена кинематическая схема сбалансированного манипулятора.
Манипулятор содержит основание, выполненное в виде колонны 1 /опорно-поворотный узел 2, установленный на колонне 1 и несущий уравновешенную стрелу в виде пантографа с шарнирно-рычажным транс лятором, состоящим из тяг 3,4, 5 и серьги в, грузозахватное устройство 7, шарнирно связанное с тягой бис выходным звеном 8 пантографа, привод 9, кинематически связанный с ведущим шарниром пантографа посредством ролика 10, установленным в вертикальных направляющих 11 опорно-поворотного устройства 2, а также установленных направляющих 12 опорно-поворотного устройства 2, ролик 13 второго ведущего шарнира пантографа и дополнительный пантограф 14, несущий противовес 15.
Сбалансированный манипулятор работает следующим образом.
При включении электродвигателя 9 дви- жение передается ролику 10, который совершает поступательное перемещение, обеспечивая подъем или опускание манипулируемого объекта. В горизонтальной плоскости перемещение захватного устройства осуществляется вручную. При этом из-за на личия противовеса 15 силы трения в горизонтальных направляющих 12 минимальны, что позволяет осуществить манипулирование груза наименьшими энергозатратами. Формула изобретения Сбалансированный манипулятор, содержащий основание, выполненное в виде колонны, поворотный узел, шарнирно установленный на колонне и имеющий горизонтальные и вертикальные направляющие, захватное устройство, два ролика, первый пантограф, два смежных звена которого шарнирно соединены с первым роликом, расположенным в горизонтальных направляющих поворотного узла, а два других его смежных звена шарнирно связаны соответственно с захватным устройством и с вторым роликом, расположенным в вертикальных направляющих поворотного узла, а также транслятор, шарнирно связанный с этим пантографом, отличающийся тем, что, с целью улучшения условий труда оператора за счет уменьшения сил трения в горизонтальных направляющих поворотного узла, он снабжен вторым пантографом, два смежных звена которого шарнирно закреплены на поворотном узле, одно из двух других его звеньев шарнирно соединено с первым роликом, а другое - жестко связано с дополнительно введенным противовесом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор | 1986 |
|
SU1379105A1 |
| СБАЛАНСИРОВАННЫЙ ЗАГРУЗОЧНЫЙ РУКАВ БЕЗ ОСНОВАНИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ ТЕКУЧЕГО ПРОДУКТА | 2011 |
|
RU2580488C2 |
| Манипулятор | 1986 |
|
SU1324843A1 |
| БАЛАНСИРНЫЙ ПНЕВМАТИЧЕСКИЙ МАНИПУЛЯТОР | 2013 |
|
RU2625356C2 |
| Манипулятор | 1988 |
|
SU1602728A2 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Сбалансированный манипулятор | 1987 |
|
SU1468739A1 |
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
| Манипулятор | 1986 |
|
SU1542791A2 |
| Перегрузочный манипулятор | 1985 |
|
SU1247257A1 |
Изобретение относится к машиностроению и может быть использовано в погрузочных манипуляторах. Цель изобретения - улучшение условий труда оператора за счет уменьшения сил трения в горизонтальных направляющих поворотного узла. При включении электродвигателя 9 происходит вертикальное перемещение ролика 10, расположенного в вертикальных направляющих поворотного узла 2. При этом первый пантограф обеспечивает вертикальное перемещение захватного устройства. Для горизонтального перемещения захватного устройства оператор вручную воздействует на него. При этом ролик 13 перемещается в горизонтальных направляющих поворотного узла. Одновременно второй пантограф, шарнирно установленный на поворотном узле, изменяет свою конфигурацию, что обеспечивает постоянное направленное вверх уравновешивающее усилие противовеса 15, приложенное к ролику 13. За счет этого уменьшается трение в горизонтальных направляющих поворотного узла. 1 ил.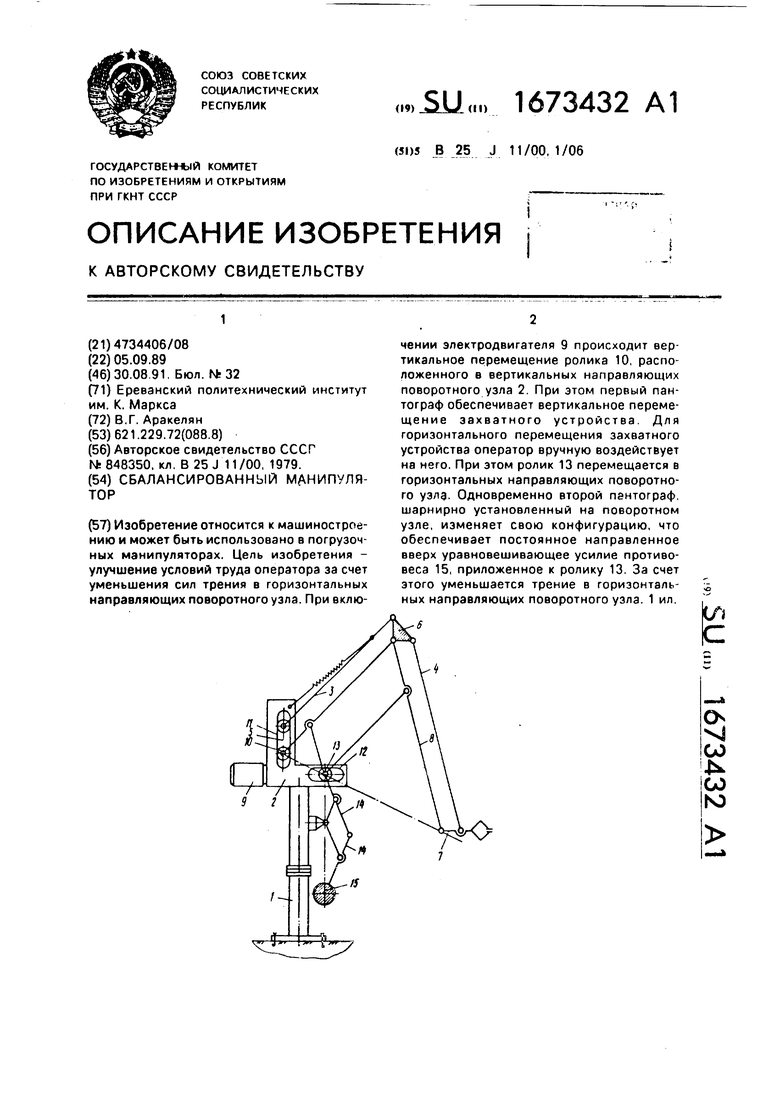
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
