Изобретение относится к машиностроению, в частности к подъемно-транспортным механизмам.
Известно грузоподъемное устройство, содержащее гибкий замкнутый тяговый орган и полиспаст. Данное грузоподъемное устройство обеспечивает принудительное перемещение груза как при его подъеме, так и при опускании.
Однако данный подъемный механизм имеет достаточно низкий предел по максимальной массе поднимаемого груза. Наиболее близким к предлагаемому является грузоподъемный механизм, содержащий полиспаст, включающий гибкий тяговый орган, охватывающий два барабана, закрепленные на общей приводной оси, неподвижные и подвижные блоки, одни из которых размещены на раме грузоподъемного механизма, а другие - на грузоподъемной его части.
Недостатки известного устройства-«из- кие функциональные возможности, а также низкие надежность и безопасность работы.
Целью изобретения является расширение функциональных возможностей и повышение безопасности и надежности работы.
Указанная цель достигается тем, что в грузоподъёмном механизме, содержащем полиспаст, включающий гибкий тяговый орган, охватывающий два барабана, закрепленные на общей приводной оси, неподвижные и подвижные блоки, одни из которых размещены на раме грузоподъемного механизма, а.другие- на грузоподъемной его части, гибкий тяговый орган выполнен бесконечным с верхним и нижним контурами, огибающими две пары установленных друг над другом подвижных блоков и четыре неподвижных блока, закрепленные на раме попарно по обе стороны от подвижной части, упомянутые барабаны установлены между парами неподвижных блоков, каждый блок верхней пары охвачен скобой, на участке между скобами выполнено замыкание гибкого тягово- го органа в бесконечный посредством талрепа, на грузоподъемной части установлена пружина растяжения, соединенная с участком контура гибкого тягового органа между блоками нижней подвижной пары, при этом грузоподъемная часть установлена в направляющих.
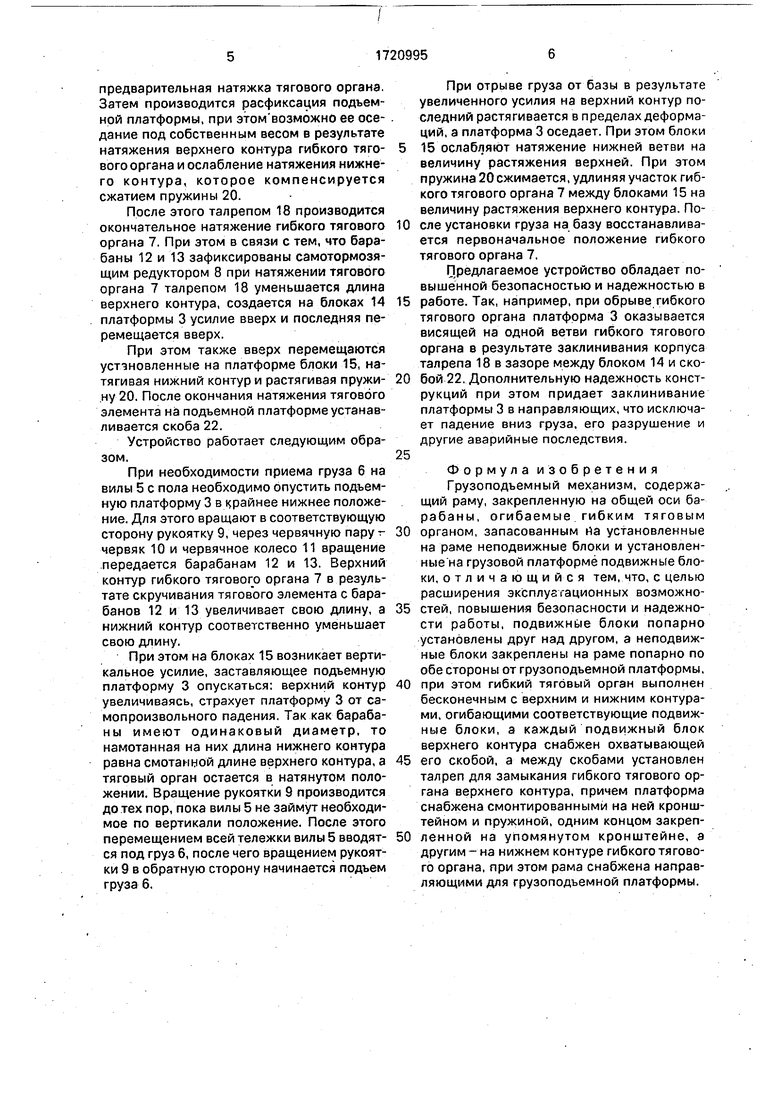
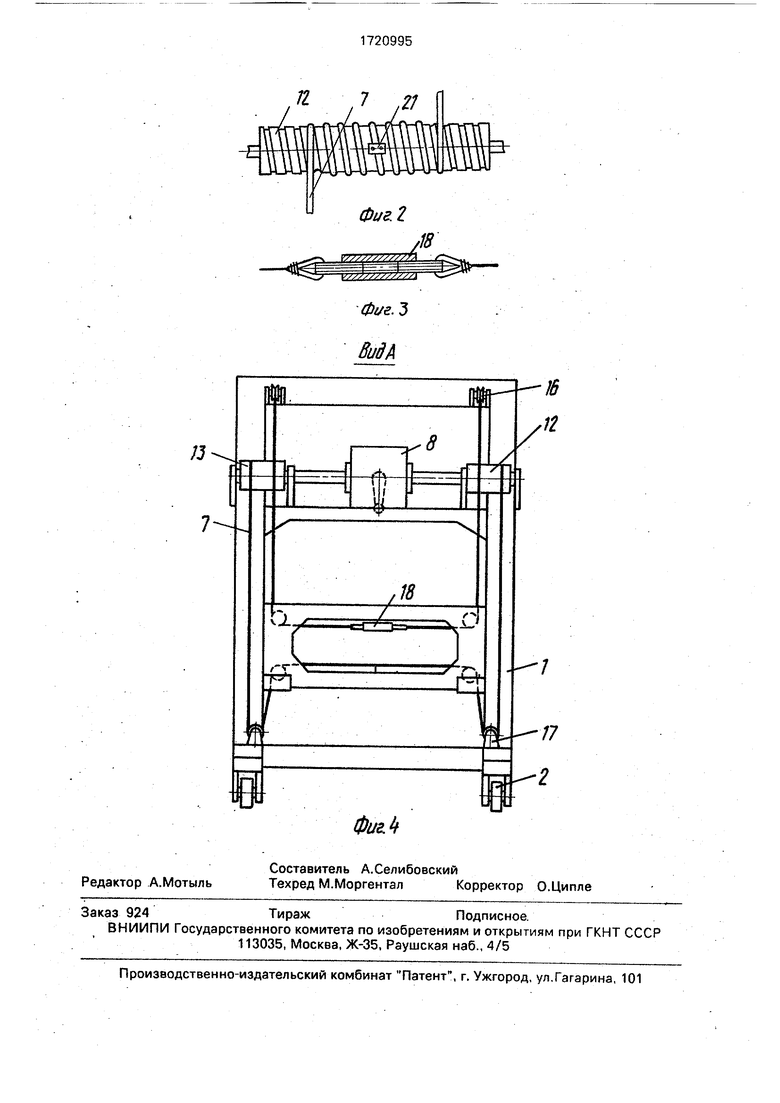
На фиг. 1 показан механизм, общий вид; на фиг. 2 - барабан грузоподъемного механизма; на фиг. 3 - схема соединения гибкого тягового органа в бесконечный посредством талрепа.
Грузоподъемный механизм содержит раму 1 с колесами 2, два из которых поворотны, На раме 1 С возможностью вертикального перемещения установлена подъемная платформа 3, перемещающаяся по направляющим 4, смонтированным на раме
1. На грузоподъемной части механизма, т. е. на платформе 3, жестко установлены вилы 5, предназначенные для подъема груза 6.
Механизм перемещения груза представляет собой полиспаст, гибкий тяговый
0 орган 7 которого приводится в движение от самотормозящего редуктора 8 посредством вращения рукоятки 9 через червяк 10 с червячным колесом 11, на оси которого установлены барабаны 12 и 13.
5 Гибкий тяговый орган кроме барабанов 12 и 13 охватывает две пары установленных друг над другом подвижных блока 14 и 15, а также четыре неподвижных блока, два из которых (блоки 16) размещены по одну сто.0 рону подвижной платформы 3, а два других (блоки 17) по другую сторону от подвижной платформы 3, Гибкий тяговый орган 7 замыкается в бесконечный посредством талпера 18 на участке между блоками верхней по5 движной пары. Талрепом 18обеспечивается натяжение гибкого тягового органа. На подъемной платформе 3 установлен кронштейн 19 с закрепленной на нем пружиной 20 растяжения, соединенной с участком гибко0 го тягового органа между блоками нижней подвижной пары.
На барабанах 12 и 13 установлены прижимы 21, фиксирующие тяговый орган 7 на каждом барабане. Каждый блок 14 верхней
5 подвижной пары с внешней стороны охвачен скобой 22, предохраняющей гибкий тяговый орган от выпадения из канавки блока и обеспечивающей останов подъемной платформы при обрыве гибкого тягового ор0 Гана, т. е. при этом талреп заклинивается между соответствующим блоком и скобой. Подъемная платформа 3 фиксируется в направляющих (не показаны) в среднем вертикальном положении. Монтаж гибкого тя5 гового органа 7 начинают с нижнего контура. Тяговый орган 7 укладывается на блоки 15 так, чтобы его концы были равны. Затем каждый конец гибкого тягового органа перебрасывается через блоки 17, на ба0 рабаны 12 и 13 наматывается столько витков, сколько необходимо для последующего подъема платформы 3 в крайнее верхнее положение. После этого тяговый орган 7 фиксируется прижимами.21 (фиг. 2). Затем
5 на барабаны 12 и 13 наматывается, столько витков, сколько необходимо для последую- щего опускания платформы в крайнее нижнее положение. После этого концы гибкого тягового органа перебрасываются через блоки 16 и 14 и талрепом 18 производится
предварительная натяжка тягового органа, Затем производится расфиксация подъемной платформы, при этом возможно ее оседание под собственным весом в результате натяжения верхнего контура гибкого тягового органа и ослабление натяжения нижнего контура, которое компенсируется сжатием пружины 20.
После этого талрепом 18 производится окончательное натяжение гибкого тягового органа 7. При этом в связи с тем, что барабаны 12 и 13 зафиксированы самотормозящим редуктором 8 при натяжении тягового органа 7 талрепом 18 уменьшается длина верхнего контура, создается на блоках 14 платформы 3 усилие вверх и последняя перемещается вверх.
При этом также вверх перемещаются установленные на платформе блоки 15, натягивая нижний контур и растягивая пружину 20. После окончания натяжения тягового элемента на подъемной платформе устанавливается скоба 22.
Устройство работает следующим образом.
При необходимости приема груза 6 на вилы 5 с пола необходимо опустить подъемную платформу 3 в крайнее нижнее положение. Для этого вращают в соответствующую сторону рукоятку 9, через червячную пару т- червяк 10 и червячное колесо 11 вращение передается барабанам 12 и 13. Верхний контур гибкого тягового органа 7 в результате скручивания тягового элемента с барабанов 12 и 13 увеличивает свою длину, а нижний контур соответственно уменьшает свою длину.
При этом на блоках 15 возникает вертикальное усилие, заставляющее подъемную платформу 3 опускаться: верхний контур увеличиваясь, страхует платформу 3 от самопроизвольного падения. Так как барабаны имеют одинаковый диаметр, то намотанная на них длина нижнего контура равна смотанной длине верхнего контура, а тяговый орган остается в натянутом положении. Вращение рукоятки 9 производится до тех пор, пока вилы 5 не займут необходимое по вертикали положение. После этого перемещением всей тележки вилы 5 вводятся под груз 6, после чего вращением рукоятки 9 в обратную сторону начинается подъем груза 6.
При отрыве груза от базы в результате увеличенного усилия на верхний контур последний растягивается в пределах деформаций, а платформа 3 оседает. При этом блоки 5 15 ослабляют натяжение нижней ветви на величину растяжения верхней. При этом пружина 20сжимается, удлиняя участок гибкого тягового органа 7 между блоками 15 на величину растяжения верхнего контура. По0 еле установки груза на базу восстанавливается первоначальное положение гибкого тягового органа 7.
Предлагаемое устройство обладает повышенной безопасностью и надежностью в
5 работе. Так, например, при обрыве гибкого тягового органа платформа 3 оказывается висящей на одной ветви гибкого тягового органа в результате заклинивания корпуса талрепа 18 в зазоре между блоком 14 и ско0 бой 22. Дополнительную надежность конструкций при этом придает заклинивание платформы 3 в направляющих, что исключает падение вниз груза, его разрушение и другие аварийные последствия.
5
Формула изобретения Грузоподъемный механизм, содержащий раму, закрепленную на общей оси барабаны, огибаемые гибким тяговым
0 органом, запасованным на установленные на раме неподвижные блоки и установленные на грузовой платформе подвижные блоки, отличающийся тем, что, с целью расширения эксплуатационных возможно5 стей, повышения безопасности и надежности работы, подвижные блоки попарно установлены друг над другом, а неподвижные блоки закреплены на раме попарно по обе стороны от грузоподъемной платформы,
0 при этом гибкий тяговый орган выполнен бесконечным с верхним и нижним контурами, огибающими соответствующие подвижные блоки, а каждый подвижный блок верхнего контура снабжен охватывающей
5 его скобой, а между скобами установлен талреп для замыкания гибкого тягового органа верхнего контура, причем платформа снабжена смонтированными на ней кронштейном и пружиной, одним концом закреп0 ленной на упомянутом кронштейне, а другим-на нижнем контуре гиб ко го тягового органа, при этом рама снабжена направляющими для грузоподъемной платформы.
11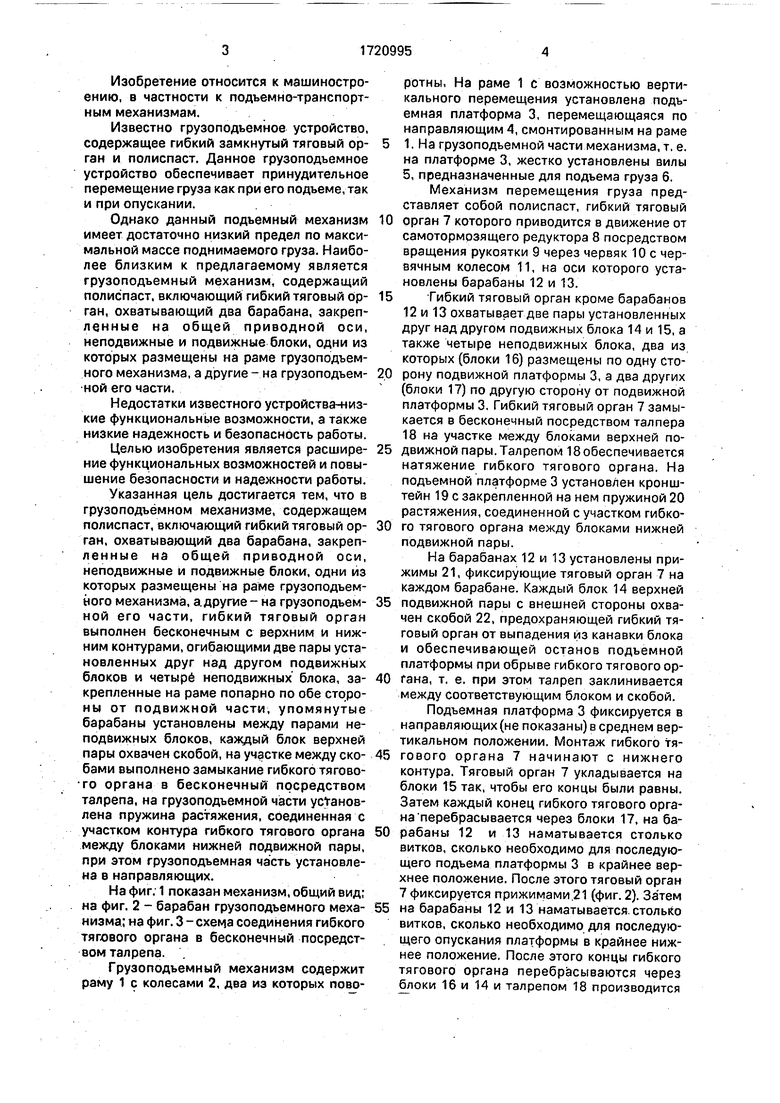
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| ПОЛИСПАСТ | 2001 |
|
RU2192386C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Рольганг | 1986 |
|
SU1362686A1 |
| Траверса-кантователь | 1987 |
|
SU1477657A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2002 |
|
RU2223216C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2001 |
|
RU2189938C1 |
| Кабельный кран | 1987 |
|
SU1532530A1 |
| Механизм перемещения секций телескопической стрелы | 1986 |
|
SU1368255A1 |
| ГРУЗОВОЙ ПОДЪЕМНИК | 2014 |
|
RU2563926C1 |
Изобретение относится к машиностроению, в частности к подъемно-транспортным механизмам. Цель изобретения - расширение функциональных возможностей и повыние екия . и к , оеым ревы шение безопасности и надежности механизма в работе. Грузоподъемный механизм содержит раму 1, полиспат, включающий бесконечно замкнутый гибкий тяговый орган 7, охватывающий два барабана 12 и 13, закрепленные на общей приводной оси, подвижные блоки 14 и 15 и неподвижные блоки 16 и 17. Каждый блок 14 из подвижной пары охвачен скобой 22. На участке между скобами 22 выполнено замыкание гибкого тягового органа в бесконечный посредством талрепа 18, регулирующего натяжение тягового органа и выполняющего роль клина при обрыве тягового органа, фиксирующего последний между блоками 14 и скобами 22. Участок тягового органа между блоками 15 соединен с подвижной платформой 3 пружиной растяжения 20. 4 ил. В Ё Фш1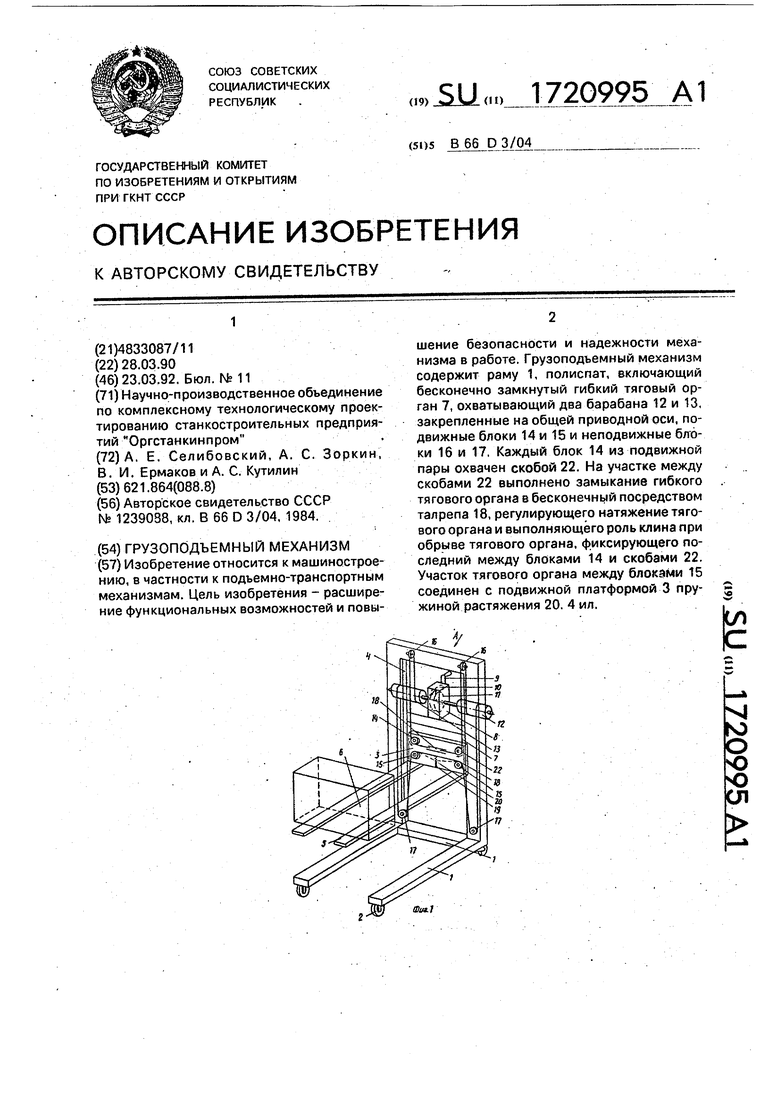
MA
Фиг. Ъ
| Рольганг-ускоритель для штучных грузов | 1984 |
|
SU1239038A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
