жение каретку 4 с вилами 5. Для обеспечения поворота вил включают вращение.при- водной звездочки по часовой стрелке. При этом захват должен быть свободен от груза. Ползун, перемещая каретку 4, движется по наклонным ветвям 15 цепи 13. При этом цевки 17 огибают звездочку 12 и, двигаясь по нижней параллельной ветви 14, входят в пазы ведомого звена 20. Благодаря тому, что цевки движутся по параллельной ветви цепи, а ползун, перемещающий каретку, - по наклонным ветвям, скорость перемещения цевок больше скорости каретки, поэтому цевки обеспечивают поворот ведомого звена 20 и через связанное с ним зубчатое колесо поворачивают на 90° вилы. Выдвижение вил в правую сторону осуществляется вращением приводной звездочки в том же направлении, при этом цевки 17 располагаются на средней параллельной ветви цепи, не входя в зацепление с ведомым эвеном. Поворот вил в обратную сторону производится аналогично при реверсировании привода. Благодаря тому, что поворот вил производится одновременно с их перемещением в сторону, противоположную направлению поворота, обеспечивается сокращение размеров пространства, необходимого для этой операции. За счет обеспечения перемещения и поворота вил с помощью одного привода повышаются производительность и удобство в эксплуатации. 12 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU787314A1 |
| Транспортно-накопительная система | 1988 |
|
SU1682255A1 |
| Грузозахват стеллажного кранаштабелера | 1988 |
|
SU1594080A1 |
| Грузозахватное устройство крана-штабелера | 1986 |
|
SU1382767A1 |
| Штаблер для обслуживания полочных стелажей | 1976 |
|
SU591379A1 |
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU918219A1 |
| Устройство для ориентации передаточной тележки стеллажного крана-штабелера относительно межстеллажного прохода | 1989 |
|
SU1705197A1 |
Использование: оборудование складов, а именно грузозахватные устройства стеллажных кранов-штабелеров. Сущность изобретения: устройство содержит закрепленный на цепи 13 ползун 18, размещенный между средней и нижней горизонтальными ветвями 14 цепи. При этом каретка 4 в исходном положении находится в крайней левом положении, а вилы 5 повернуты для обслуживания стеллажных ячеек (не показаны) с левой стороны, т.е. располагаются под грузом. После захвата груза путем подъема рамы 2 вдоль колонны 1 привод 16 вращает звездочку 6 по часовой стрелке, при этом ползун перемещается, вправо вдоль средней горизонтальной ветви 14 цепи, а вилы вместе с грузом устанавливаются в межстеллажном проходе. В этом положении привод останавливается. Для повторного выдвижения вил включают вращение приводной звездочки 6 против часовой стрелки. Ползун движется влево по средней параллельной ветви 14 цепи 13, приводя в дви10 с а к xl Ю Ј
Изобретение относится к оборудованию складов, а именно к грузозахватным устройствам кранов-штабелеров.
Известно грузозахватное устройство, содержащее несущий кронштейн с направ- ляющим рельсом, закрепленный на направ- ляющем рельсе, с возможностью перемещения и поворота, вилочный захват и привод перемещения и поворота захвата, содержащий управляемые муфты.
Устройство имеет значительные габариты, обусловленные размерами направляющего рельса, и сложную конструкцию привода.
Известно также грузозахватное устрой- ство крана-штабелера, содержащее подъемно-опускную раму с направляющими, ползун, каретку с выдвижными вилами, выполненными в виде расположенных в одной плоскости с возможностью поворота на оси пар захватных пластин, механизм для выдвижения и поворота вил, связанную с этим механизмом замкнутую цепь со звездочками, образующую параллельные и наклонные ветви к направлению выдвижения вил, и привод.
В связи с тем, что поворот вил в этом устройстве осуществляется в плоскости, параллельной плоскости захватных пластин, необходима значительная ширина межстел- лажного прохода (не менее удвоенной длины захватных пластин), кроме того, привод включает в себя управляемые фиксаторы в виде электромагнитов.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является грузозахватное устройство крана-штабелера, содержащее подъемно-опускную раму с горизонтальными направляющими, установленную на последних каретку с поворотными посредством горизонтальной оси вилами, приводной механизм перемещения каретки и механизм поворота вил.
В известном грузозахватном устройстве поворот вил для обслуживания стеллажных ячеек с противоположной стороны осуществляется путем подъема рамы, ее перемещения и опускания вновь, причем в процессе повторного опускания поворотные вилы должны взаимодействовать со специальными упорами в верхней части стеллажей. Это усложняет работу и снижает производительность.
Целью изобретения является повышение производительности и удобства в эксплуатации.
Поставленная цель достигается тем, что механизм перемещения каретки содержит замкнутую цепь, огибающую закрепленные на раме звездочки, одна из которых соединена с приводом, с образованием параллельных горизонтальным направляющим горизонтальных и размещенных под углом к последним наклонных ветвей, и соединенный с этой цепью ползун, при этом каретка выполнена с вертикальным пазом для указанного ползуна, а механизм поворота вил содержит зубчатое колесо, жестко соединенное с горизонтальной ось вил, шарнирно закрепленное на каретке ведомое звено, выполненное с пазами и зубчатым сектором для зацепления с упомянутым зубчатым колесом, и цевки, закрепленные на замкнутой цепи с возможностью захода в пазы ведомого звена для поворота вил при расположении этих цевок на одной из горизонтальных
и расположении ползуна в зоне наклонных ветвей.
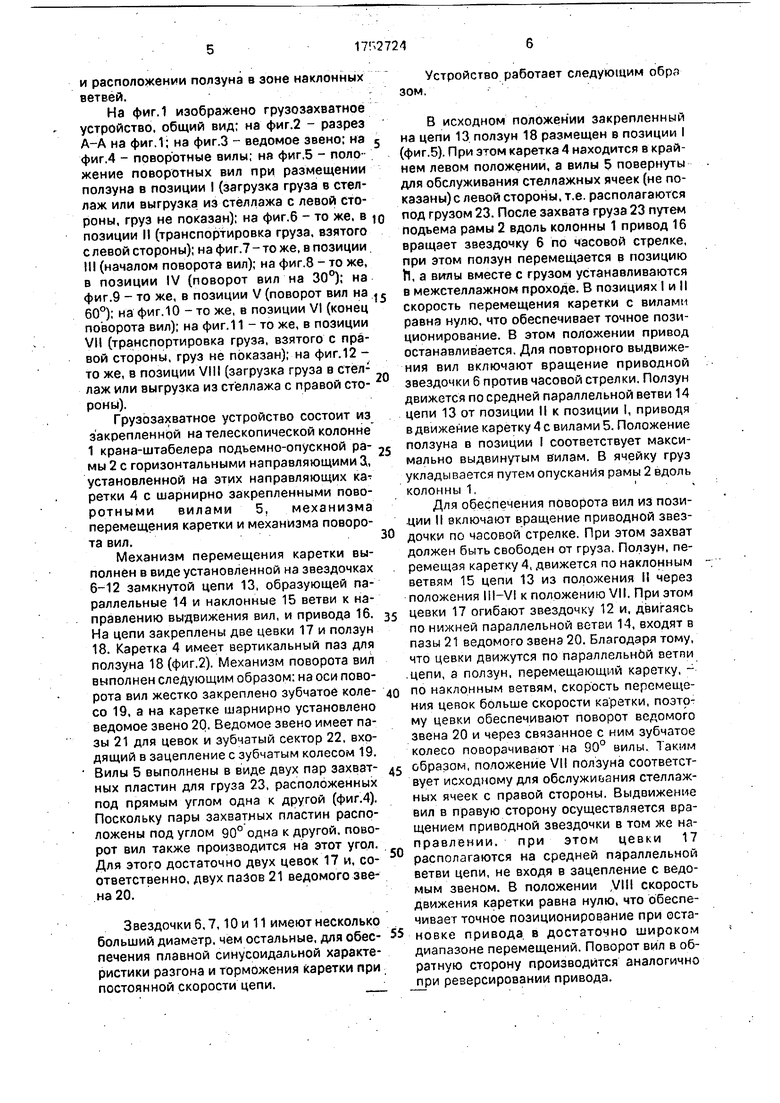
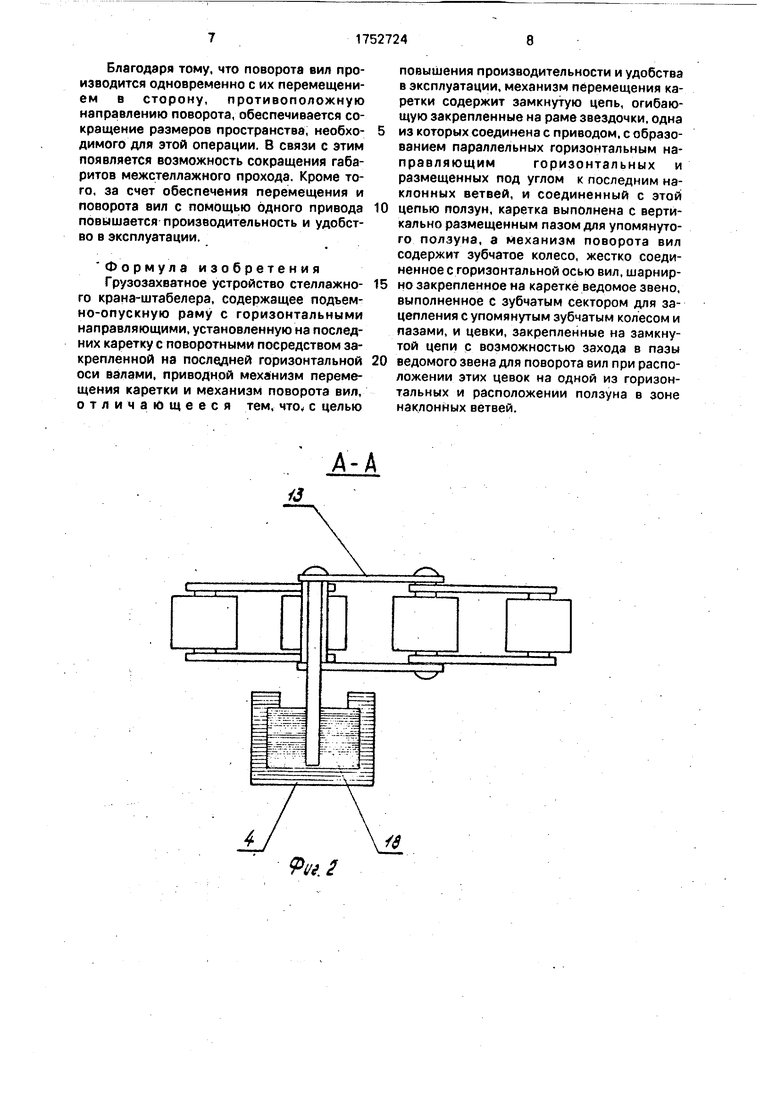
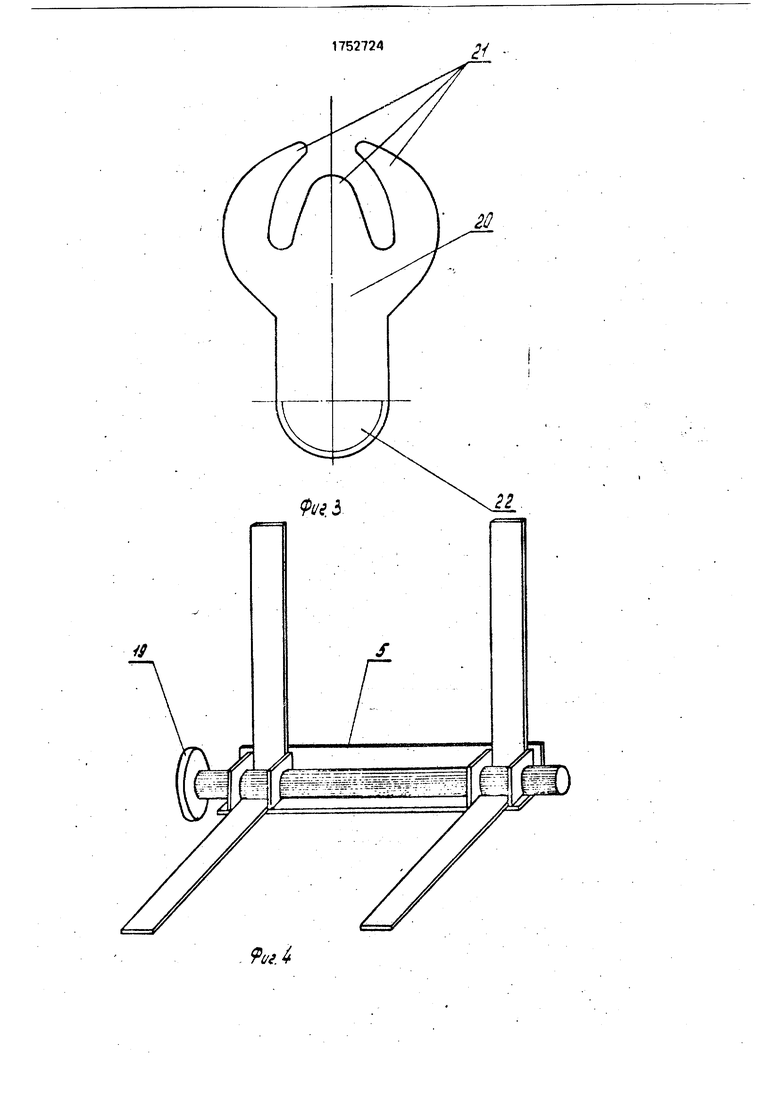
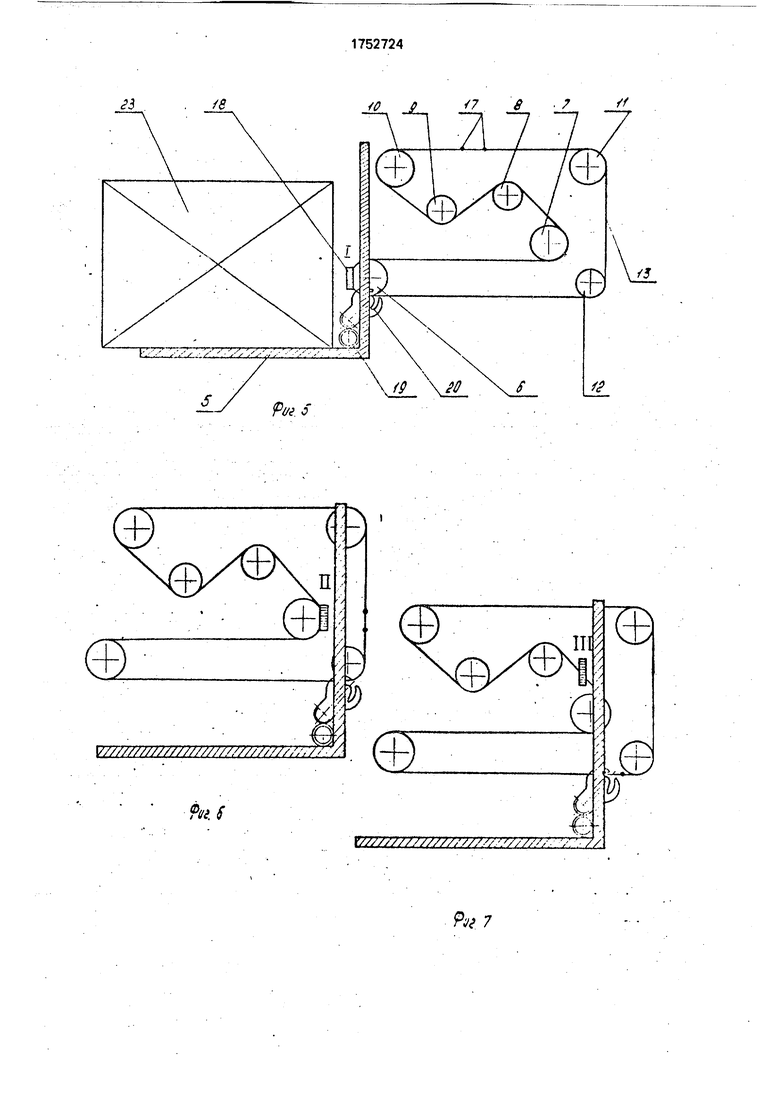
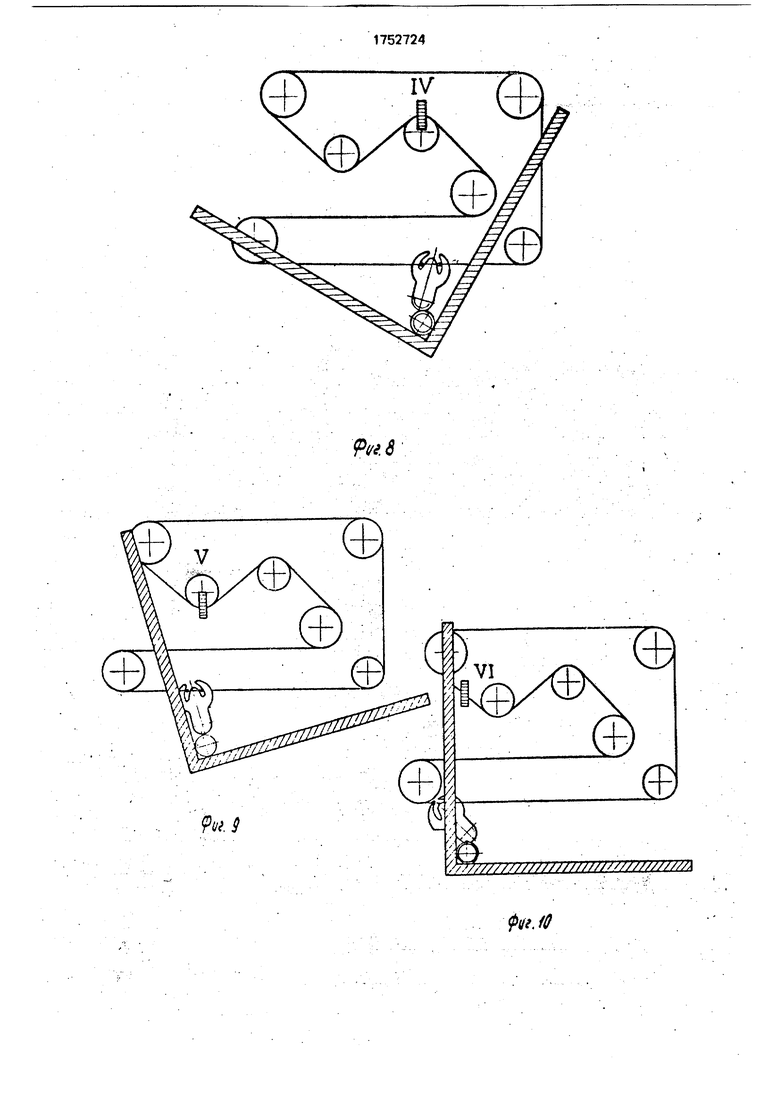
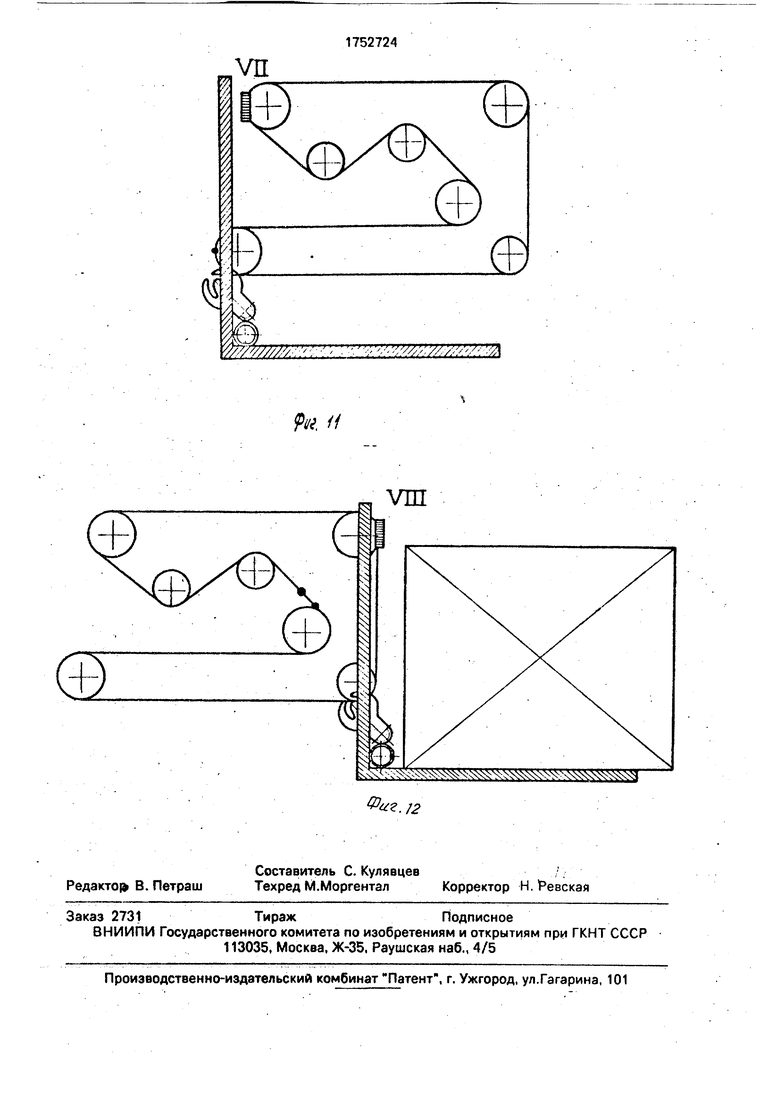
На фиг.1 изображено грузозахватное устройство, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - ведомое звено; на фиг.4 - поворотные вилы; на фиг.5 - положение поворотных вил при размещении ползуна в позиции I (загрузка груза в стеллаж или выгрузка из стеллажа с левой стороны, груз не показан); на фиг.6 - то же, в позиции II (транспортировка груза, взятого с левой стороны); на фиг.7 - то же, в позиции III (началом поворота вил); на фиг.З - то же, в позиции IV (поворот вил на 30°); на фиг.9 - то же, в позиции V (поворот вил на 60°); на фиг. 10 - то же, в позиции VI (конец поворота вил); на фиг.11 - то же, в позиции VII (транспортировка груза, взятого с правой стороны, груз не показан); на фиг. 12 - то же, в позиции VIII (загрузка груза в стел: лаж или выгрузка из стеллажа с правой стороны).
Грузозахватное устройство состоит из закрепленной на телескопической колонне 1 крана-штабелера подьемно-опускной ра- мы 2 с горизонтальными направляющими 3,, установленной на этих направляющих каретки 4 с шарнирно закрепленными поворотными вилами 5, механизма перемещения каретки и механизма поворота вил.
Механизм перемещения каретки выполнен в виде установленной на звездочках 6-12 замкнутой цепи 13, образующей параллельные 14 и наклонные 15 ветви к направлению выдвижения вил, и привода 16, На цепи закреплены две цевки 17 и ползун 18. Каретка 4 имеет вертикальный паз для ползуна 18(фиг,2). Механизм поворота вил выполнен следующим образом: на оси поворота вил жестко закреплено зубчатое коле- со 19, а на каретке шарнирно установлено ведомое звено 20. Ведомое звено имеет пазы 21 для цевок и зубчатый сектор 22, входящий в зацепление с зубчатым колесом 19. Вилы 5 выполнены в виде двух пар захват- ных пластин для груза 23, расположенных под прямым углом одна к другой (фиг.4). Поскольку пары захватных пластин расположены под углом 90° одна к другой, поворот вил также производится на этот угол. Для этого достаточно двух цевок 17 и, соответственно, двух пазов 21 ведомого звена 20.
Звездочки б, 7,10 и 11 имеют несколько больший диаметр, чем остальные, для обес- печения плавной синусоидальной характеристики разгона и торможения каретки при постоянной скорости цепи.
0
с 0
5 0 j
5
Устройство работает следующим обря зом.
В исходном положении закрепленный на цепи 13 ползун 18 размещен в позиции I (фиг.5). При этом каретка 4 находится в крайнем левом положении, а вилы 5 повернуты для обслуживания стелпажных ячеек (не по- казаны) с левой стороны, т.е. располагаются под грузом 23. После захвата груза 23 путем подъема рамы 2 вдоль колонны 1 привод 16 вращает звездочку 6 по часовой стрелке, при этом ползун перемещается в позицию tl, а вилы вместе с грузом устанавливаются в межстеллажном проходе. В позициях I и II скорость перемещения каретки с вилами равна нулю, что обеспечивает точное позиционирование. В этом положении привод останавливается. Для повторного выдвижения вил включают вращение приводной звездочки 6 против часовой стрелки. Ползун движется по средней параллельной ветви 14 цепи 13 от позиции II к позиции I, приводя в движение каретку 4 с вилами 5. Положение ползуна в позиции I соответствует максимально выдвинутым вилам. В ячейку груз укладывается путем опускания рамы 2 вдоль колонны 1,
Для обеспечения поворота вил из позиции II включают вращение приводной звездочки по часовой стрелке. При этом захват должен быть свободен от груза. Ползун, перемещая каретку 4, движется по наклонным ветвям 15 цепи 13 из положения II через положения III-VI к положению VII, При этом цевки 17 огибают звездочку 12 и, двигаясь по нижней параллельной ветви 14, входят в пазы 21 ведомого звенэ 20. Благодаря тому, что цевки движутся по параллельной ветпи цепи, а ползун, перемещающий каретку, - по наклонным ветвям, скорость перемещения цевок больше скорости каретки, поэтому цевки обеспечивают поворот ведомого звена 20 и через связанное с ним зубчатое колесо поворачивают на 90° вилы. Таким образом, попожение VII ползуна соответствует исходному для обслужиьания стеллажных ячеек с правой стороны. Выдвижение вил в правую сторону осуществляется вращением приводной звездочки в том же направлении, при этом цевки 17 располагаются на средней параллельной ветви цепи, не входя в зацепление с ведомым звеном. В положении ,Vlll скорость движения каретки равна нулю, что обеспечивает точное позиционирование при остановке привода в достаточно широком диапазоне перемещений. Поворот вил в обратную сторону производится аналогично при реверсировании привода.
Благодаря тому, что поворота вил производится одновременно с их перемещением в сторону, противоположную направлению поворота, обеспечивается сокращение размеров пространства, необходимого для этой операции, В связи с этим появляется возможность сокращения габаритов межстеллажного прохода. Кроме того, за счет обеспечения перемещения и поворота вил с помощью одного привода повышается производительность и удобство в эксплуатации.
Формула изобретения
Грузозахватное устройство стеллажного крана-штабелера, содержащее подъемно-опускную раму с горизонтальными направляющими, установленную на последних каретку с поворотными посредством закрепленной на последней горизонтальной оси валами, приводной механизм перемещения каретки и механизм поворота вил, отличающееся тем, что, с целью
А-А
Vi/i.2
повышения производительности и удобства в эксплуатации, механизм перемещения каретки содержит замкнутую цепь, огибающую закрепленные на раме звездочки, одна
из которых соединена с приводом, с образованием параллельных горизонтальным направляющим горизонтальных и размещенных под углом к последним наклонных ветвей, и соединенный с этой
цепью ползун, каретка выполнена с вертикально размещенным пазом для упомянутого ползуна, а механизм поворота вил содержит зубчатое колесо, жестко соединенное с горизонтальной осью вил, шарнирно закрепленное на каретке ведомое звено, выполненное с зубчатым сектором для зацепления с упомянутым зубчатым колесом и пазами, и цевки, закрепленные на замкнутой цепи с возможностью захода в пазы
ведомого звена для поворота вил при расположении этих цевок на одной из горизонтальных и расположении ползуна в зоне наклонных ветвей.
i
-fc-.
го.
III
/-LX/L. LL
SSЈ8 i
S Щ
©
//7т7/{7/{/////////////////////////Л
я
f V.
Ј M(j
ее
fr2i29il
9м §
Ркв
77777777/ // / / f/// ///////S///////////A
фаг. Ю
Як //
УШ
i4-sS U S
| СПОСОБ СТЕРИЛИЗАЦИИ КОМПОТА ИЗ ЧЕРЕШНИ | 2012 |
|
RU2517900C2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
