00 00
to
Oi
Pui.t
Изобретение относится к оборудованию складов, а именно к грузозахватным устройствам кранов-штабелеров.
Цель изобретения - упрощение конструкции и уменьшение габарита по ширине.
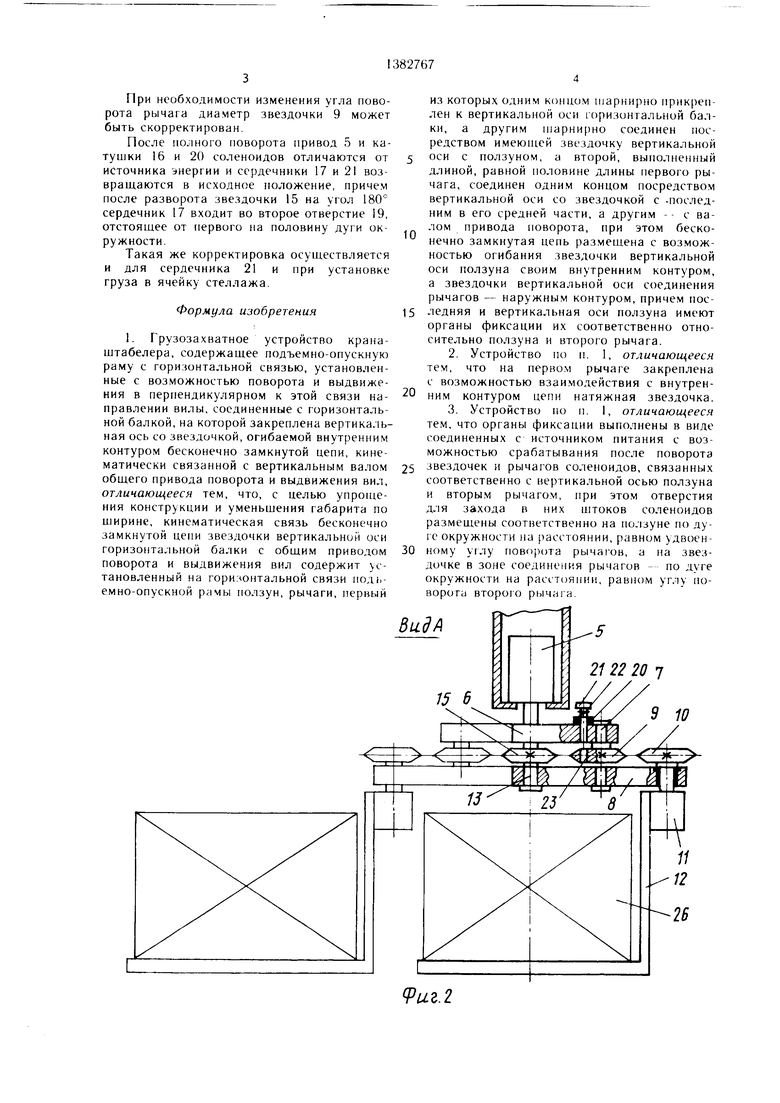
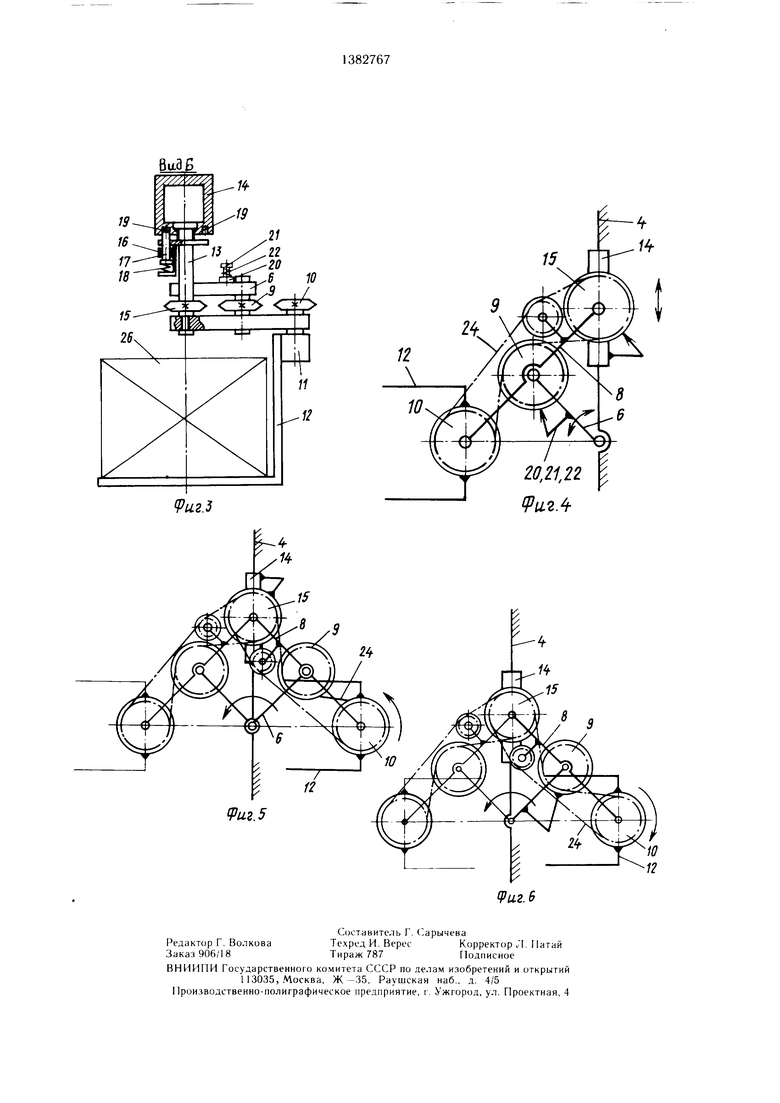
На фиг. 1 показано грузозахватное устройство крана-штабелера, общий вид; на фиг. 2 - вид А на фиг. 1 (перед установкой груза в стеллажи); на фиг. 3 - вид Б на фиг. 1 (перед установкой груза в стеллаж); на фиг. 4 - кинематическая схема грузозахватного устройства; ни фиг. 5 - то же, при установке груза в стеллаж; на фиг. 6 - то же, с другой стороны прохода между стеллажами.
Кран-1итабелер состоит из верхней платформы 1 с установленной на ней подъемной лебедкой 2 и приводами перемещения платформы в горизонтальной плоскости (не показано).
Снизу к платформе прикреплены две телескопические колонны 3, концевые секции которых связаны между собой нижней горизонтальной связью -- балкой 4.
Грузозахватное устройство, размещенное на балке 4, содержит реверсивный привод 5, на оси которого закреплен рычаг 6, другой конец которого щарнирно посредством вертикальной оси 7 соединен с серединой рычага 8.
На оси 7, кроме того, жестко посажена звездочка 9. Рычаг 8 имеет на одном конце шарнирно установленную звездочку 10, жестко связанную с переходной горизонтальной балкой II, на которой размещены вилы 12. Другой конец рычага 8 шарнирно посредством вертикальной оси 13 установлен на ползуне 14. В свою очередь ось 13 установлена на ползуне с возможностью поворота и имеет жестко связанную с ней звездочку 15 и орган фиксации оси 13 от поворота относительно ползуна, выполненный, например, в виде соленоида, состоящего из катущки 16 и сердечника 17, который в ис.ходном положении (при отсутствии тока в ) выдвинут пружиной 18 и находится в соответствующем отверстии 19 ползуна 14.
Звездочка У взаимодействует с органом фиксации ее от поворота относительно рычага 6, выполненным аналогично описанному выше, причем катушка 20 установлена на рычаге 6, сердечник 21 в исходном положении выведен пружиной 22 из соответствующего отверстия 23 на звездочке 9 и находится напротив него.
Вокруг осей 7 и 13 напротив сердечников соленоидов по дуге окружностей выполнены два отверстия 23. Расстояние между отверстиями 23 равно углу поворота рычага 6, а между отверстиями 19 в два раза больше. В середине рычага 8 закреплен одним концом рычаг 6, причем длина последнего вдвое меньше.
0
5
0
5
0
5
0
5
0
5
Звездочки 9, 10 и 15 имеют одинаковый диаметр и связаны замкнутой цепью 24, причем звездочки 10 и 15 охвачены цепью 24, а звездочка 9 входит в зацепление только с одной ее ветвью. Для предотвращения взаимодействия звездочки 9 со второй ветвью цепи, так как звездочки 9, 10 и 15 расположены .на одной оси, вторая ветвь цепи 24 отведена от звездочки 9 звездочкой 25, закрепленной на рычаге 8 и являющейся одновременно и натяжным устройством.
Грузозахватное устройство крана-штабелера работает следующим образом.
В исходном положении вилы 12 грузозахватного устройства размещены под балкой 4, при этом сердечник 17 под действием пружины 18 находится в отверстии 19, фиксируя зЬездочку 15 от поворота относительно ползуна 14. Сердечник 21 под действием пружины 22 выведен из отверстия 23 и звездочка 9 может поворачиваться относительно рычагов 6 и 8.
Для взятия груза из ячейки ст .ллажа кран-штабелер подходит к стеллажу, вилы 12 грузозахватного устройства устанавливаются напротив необходимой ячейки.
При включении привода 5 (фиг. 5) рычаг 6 поворачивается против часовой стрелки, ползун 14 перемещается вдоль нижней балки 4 крана-штабелера, при этом благодаря определенному соотношению длины рычагов 6 и 8 (рычаг 6, закрепленный на середине рычага 8, вдвое его короче) осуществляется прямолинейное (перпендикулярное движению ползуна) перемещение оси звездочки 10. Прямолинейное движение вил 12 обес11ечивается перемещением звездочки 10 с помощью цепи 24 на угол, равный углу поворота рычага 8 относительно звездочки 15. Звездочка 9 при этом свободно поворачивается относительно рычагов 6 и 8.
После полного выдвигания вил 12 подъемной лебедкой 2 осуществляется взятие груза 26 из ячейки стеллажа. Перемещение груза 26 под балку 4 производится поворотом рычага 6 в противоположную сторону.
Для взятия груза из ячейки стеллажа с другой стороны прохода (фиг. 6) перед или одновременно с включением привода 5 подается энергия в катущки 16 и 20 соленоидов. Сердечник 17, преодолевая действие пружины 22, входит в отверстие 23 звездочки 9; фиксируя ее от поворота относительно рычага 6. Рычаг 6, поворачиваясь против часовой стрелки, вращает звездочку 9 относительно рычага 8 против часовой стрелки, причем угол поворота звездочки 9 в два раза больше угла поворота рычага 6. Например, для поворота вил 12 на 180° угол поворота рычага 6 будет равен 90°.
При необходимости изменения угла поворота рычага диаметр звездочки 9 может быть скорректирован.
После полного поворота привод 5 и катушки 16 и 20 соленоидов отличаются от источника энергии и сердечники 17 и 21 возвращаются в исходное положение, причем после разворота звездочки 15 на угол 180° сердечник 17 входит во второе отверстие 19, отстоящее от первого на половину дуги окружности.
Такая же корректировка осуществляется и для сердечника 21 и при установке груза в ячейку стеллажа.
Формула изобретения
1. Грузозахватное устройство крана- щтабелера, содержащее подъемно-опускную раму с горизонтальной связью, установленные с возможностью поворота и выдвижения в перпендикулярном к этой связи направлении вилы, соединенные с горизонтальной балкой, на которой закреплена вертикальная ось со звездочкой, огибаемой внутренним контуром бесконечно замкнутой цепи, кинематически связанной с вертикальным валом общего привода поворота и выдвижения вил, отличающееся тем, что, с целью упрощения конструкции и уменьшения габарита по щирине, кинематическая связь бесконечно замкнутой цепи звездочки вертикальной оси горизонтальной балки с общим приводом поворота и выдвижения вил содержит установленный на горизонтальной связи под;,- емно-опускной рамы ползун, рычаги, первый
0
0
5
0
из которых одним концом п арнирно прикреплен к вертикальной оси 1 оризонтальиой балки, а другим щарнирно соединен посредством имеющей звездочку вертикальной оси с ползуном, а второй, выполненный длиной, равной половине длины первого рычага, соединен одним концом посредством вертикальной оси со звездочкой с -последним в его средней части, а другим -- с валом привода поворота, при этом бесконечно замкнутая цепь размещена с возможностью огибания звездочки вертикальной оси ползуна своим внутренним контуром, а звездочки вертикальной оси соединения рычагов - наружным контуром, причем последняя и вертикальная оси ползуна имеют органы фиксации их соответственно относительно ползуна и второго рычага.
2.Устройство 110 п. 1, отличающееся тем, что на первом рычаге закреплена с возможностью взаимодействия с внутренним контуром цепи натяжная звездочка.
3.Устройство по п. 1, отличающееся тем, что органы фиксации выполнены в виде соединенных с источником питания с возможностью срабатывания после поворота звездочек и рычагов соленоидов, связанных соответственно с вертикальной осью ползуна и вторым рычагом, при этом отверстия для захода в них штоков соленоидов размещены соответственно на ползуне по дуге окружности па расстоянии, равном удвоенному углу поворота рычагов, а на звездочке в зоне соединения рычагов - по дуге окружности на расст()Я11ии, рав}К)м углу поворота второго рычага.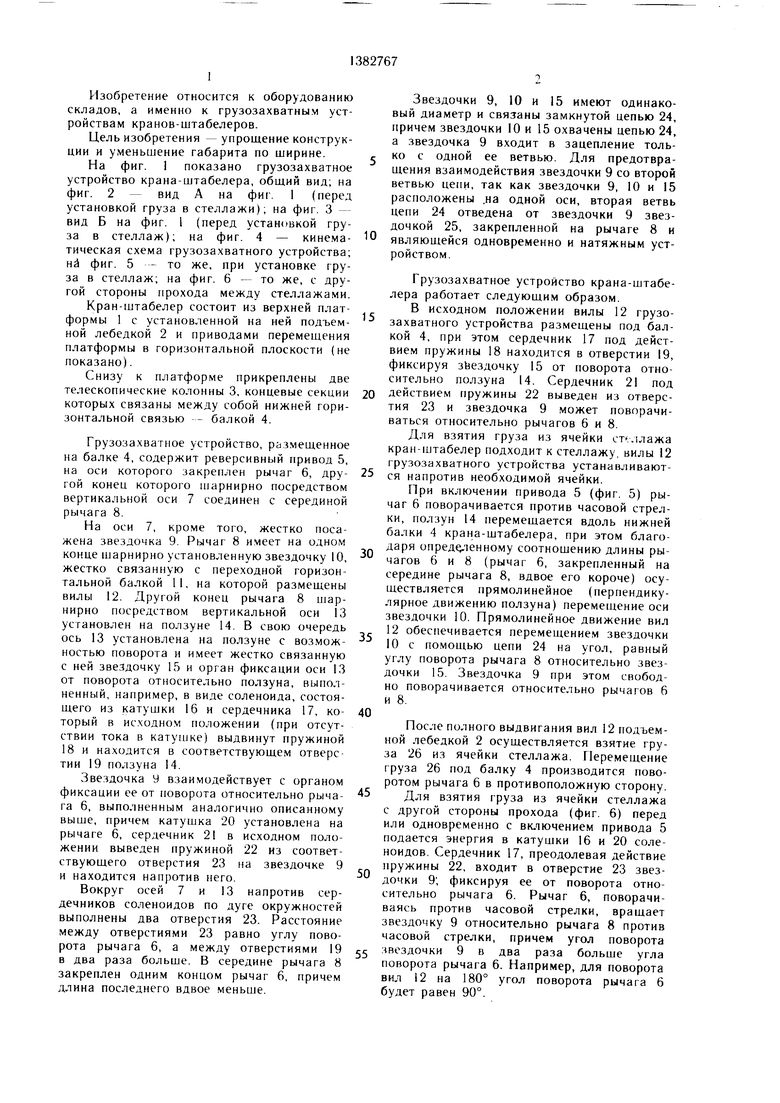
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU787314A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Грузоподъемная площадка крана- шТАбЕлЕРА | 1978 |
|
SU796128A1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| Мостовой кран-штабелер | 1983 |
|
SU1171413A2 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
Изобретение относится к оборудованию складов, а именно к грузозахватным устройствам кранов-штабелеров. Цель изобретения - упрощение конструкции и уменьшение габарита по ширине. Грузозахватное устройство содержит выдвижные вилы, горизонтальную балку, связанную с последними, привод поворота горизонтальной балки, кинематически связанный с последней. Кинематическая связь содержит рычаги 6 и 8, соединенные между собой вертикальной осью, ползун 14, установленный на горизонтальной связи рамы и связанный вертикальной осью с одним концом рычага 8, другой конец которого соединен вертикальной осью с горизонтальной балкой вил, звездочки 9, 10 и 15, размеш,енные по одной на упомянутых вертикальных осях, и огибаюш,ий их гибкий орган. Устройство имеет орган фиксации звездочки 15 относительно ползуна и орган фиксации рычага 6 относительно звездочки 9. 2 з. п. ф-лы, 6 ил. i (Л
10
9иг.г
fffi.g 10 , j 9 ./
ж
.J
,f/,22
.4
| КОМПОЗИЦИЯ ДЛЯ ПОКРЫТИЙ | 2002 |
|
RU2283853C2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
