ля используется система избыточного давления. ЭЦ 10 соединен одним концом с источником избыточного давления. На другом конце ЭЦ 10 установле на заглугака, взаимодействующая с . упором 12, разме1ченным на конце крюка. В процессе работы к рукоятке стряхивателя подводится давление. Сборишк наводит захват 6 на ветвь,
80663
подлежащую встряхиванию. Клапаном управления Подается давление к клапану золотникового распределителя 9. По каналам давление подводится к полостям крюка и к полостям ЭЦ 10, который изменяет форму и, захватывая ветвь дерева, упирается в упор 12. Затем начинается процесс встряхивания самой ветви, 2 з.п. ф-лы, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU872251A1 |
| Пневматическое устройство ударного действия | 1990 |
|
SU1801051A3 |
| Система управления пневматическим молотом | 1987 |
|
SU1438902A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ СОКА ИЗ ПЛОДОВ | 1994 |
|
RU2077250C1 |
| Турельный стряхиватель плодов с деревьев | 1981 |
|
SU959676A2 |
| МАШИНА ДЛЯ ЧИСТКИ, БЛАНШИРОВКИ И ФАРШИРОВКИ ПЕРЦА И Т. П. | 1939 |
|
SU59657A1 |
| Распределитель потока | 1990 |
|
SU1727113A1 |
| Устройство для сбора плодов | 1980 |
|
SU882471A1 |
| Система автоматического управления ковочным прессом | 1975 |
|
SU610678A1 |
| Привод подач шлифовального станка | 1988 |
|
SU1664534A1 |
Изобретение относится к области сельскохозяйственного машиностроения, в частности к ручным устройствам для съема плодов на посадках, возделываемых на тракторонедоступных участках. Цель изобретения - повьш ение производительности труда. Стряхиватель содержит штангу с рукояткой, в которой установлен клапан управления пневматическим виброцилиндром, шток 5 которого связан с имеющим крюк захватом Ь. Па конце захвата 6 закреплен для поджатия ветви полый эластичньш цилиндр (ЭЦ) 10. Для работы стряхивате(Л 00 00 о О) О5 со
1
Изобретение относится к области сельскохозяйственного машиностроения, в частности, к ручным устройствам для съема плодов на посадках, возделываемых на тракторонедоступных участках.
Целью изобрете гая является повышение производительности труда.
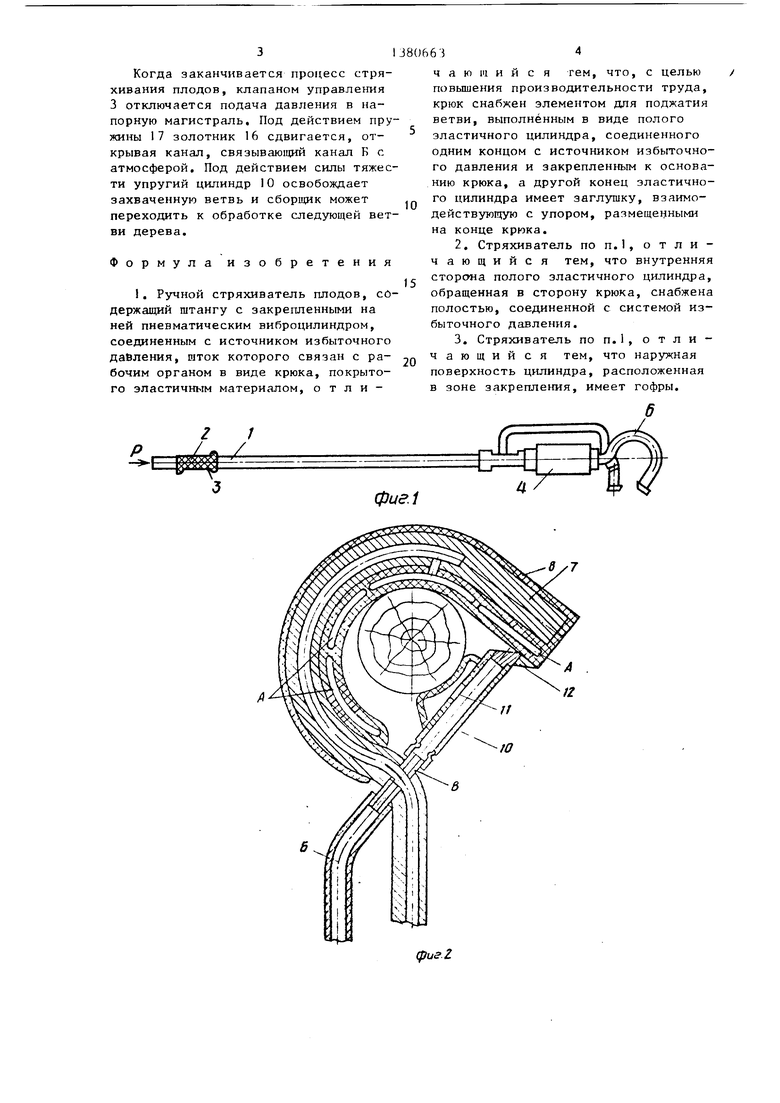
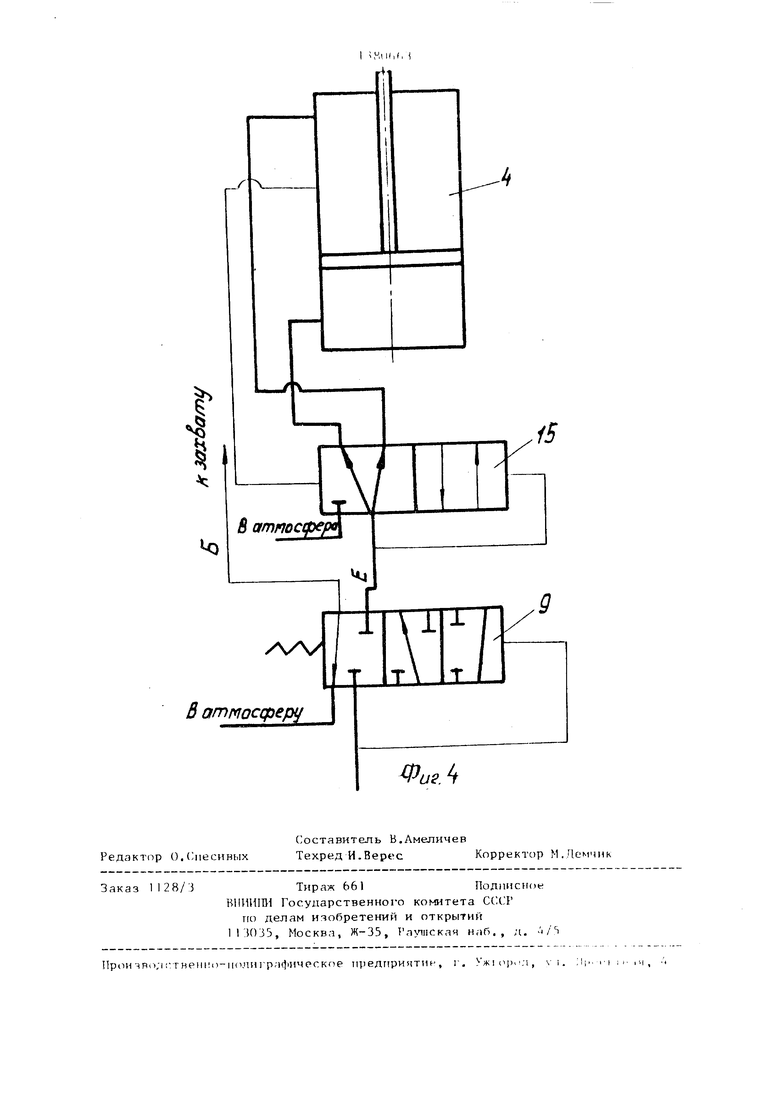
На фиг.1 изображен общий вид ручного стряхивателя плодов, вид сбоку; на фиг.2 - захват в разрезе; на фиг.З - пневматический цилиндр в разрезе; на фиг.4 - принципиальная пневматическая схема стряхивателя,
Ручной стряхиватель плодов включает штангу 1 с рукояткой 2, в которой установлен клапан управления 3. На конце штанги 1 размещен пневматический виброцилиндр 4, шток 5 которого связан с захватом 6, состоящем из крюка 7, покрытого эластичным материалом 8, полости А, сообщенные между собой и посредством канала Б с клапаном золотникового распределителя 9. К одному концу крюка 7 закреплен имеющий заглушку полый элас- тичКый цилиндр 10 для прижатия ветвей, который крепится к крюку посредством гофр. Сторона цилиндра, обращенная во внутрь крюка 7, имеет эластичную емкость, которая сообщается через отверстие 11 с цилиндром 10. На другом конце крюка 7 имеется упор 12 для фиксации эластичного цилиндра 10, выполненный в виде упругого элемента.
Пневматический виброцилиндр 4 состоит из корпуса 13, в котором размещен поршень 14 со штоком 5. В задней час.ти корпуса установлен золотник 15, управляющий подачей воздуха в зоны С и Д полости виброцилиндра 4. К корпусу 13 закреплен золотниковый распределитель, в корпусе которого размещены золотник 16 и пружина 17. Давление срабатывания клапана, зависящее от усилия пружины 17, регулируется с помощью винта I8.
Ручной стряхиватель плодов работает следующим образом.
К рукоятке 2 стряхивателя подводится воздушное давление Р. Сборщик заводит захват 6 на ветвь, подлежащую встряхиванию. Клапаном управления 3 включается давление Р к клапану золотникового распределителя 9, при этом по каналу Б давление подводится к полостям А крюка 7, а по каналу В к полости упругого цилиндра 10, который под действием давления изменяет форму и, захватывая ветвь дерева, упирается в упор 12, При достижении заданного давления Р, золотник 16, преодолевая усилие пружины 17, перекрьтает канал Б и открывает
канал Е, подавая давление Р в рабочие полости виброцилиндра 4. Подача давления Р в рабочие полости виброцилиндра 4 управляется золотником 15, так как площадь штоковой части Д поршня меньше, чем бесштоковая С. Поршень 14 двигается в направлении, указанном стрелкой, в конечном положении связывает подпоршневую полость Д с атмосферой. Давление подпоршневой зоны Д воздействует на золотник 15 виброцилиндра 4, который подает рабочее давление в штоковую полость Д, связывая бесштоковую полость С виброцилиндра 4 с атмосферой. Поршень 14 двигается в обратном направлении и.
когда он дойдет до конца, золотник 15 возвращается в первоначальное положение и цикл повторяется.
фиг1
И/
0/7
в атмосферу
-«
1S
Vui. 4
| Патент США № 3212250, кл | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Проспект фирмы Компаньола | |||
| Техническое описание стряхивателя плодов модель СГ, Италия, 1982. | |||
