со
ас о о со ел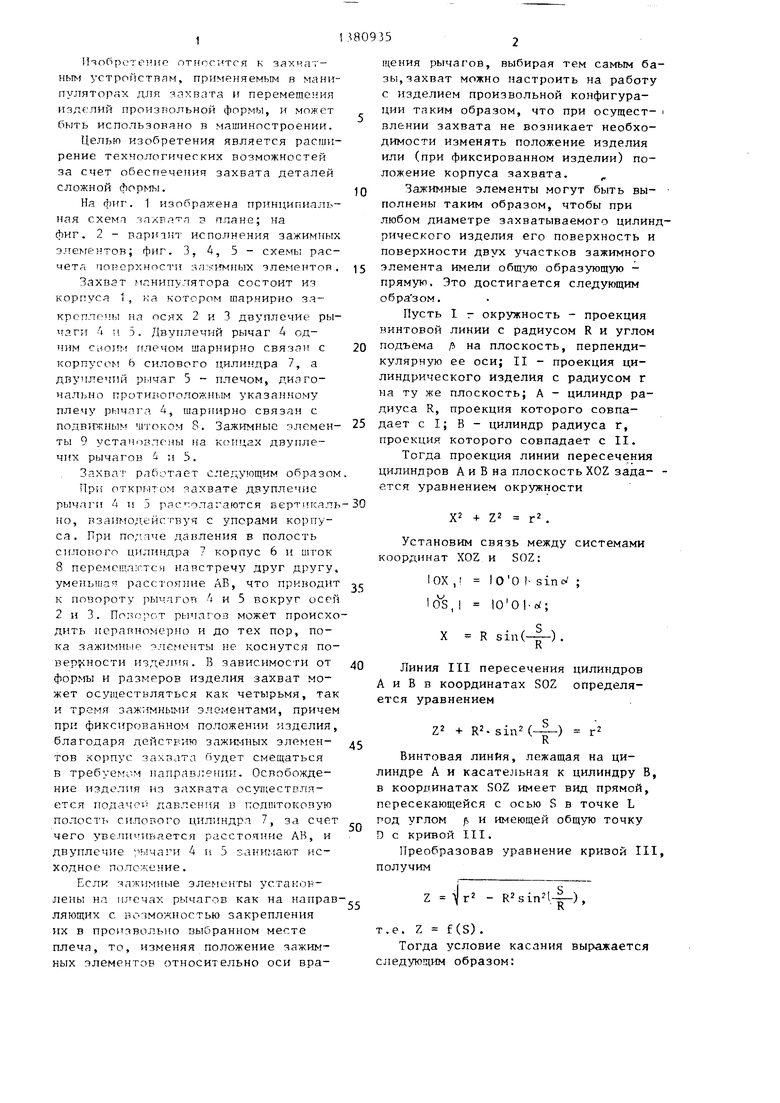

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Захват | 1983 |
|
SU1117206A1 |
| Манипулятор | 1984 |
|
SU1333567A1 |
| Прибор для воспроизведения кривых | 1989 |
|
SU1655817A1 |
| Клещевой захват ковочного манипулятора | 1982 |
|
SU1034826A1 |
| Прибор для воспроизведения кривых | 1990 |
|
SU1805062A1 |
| ЗАЖИМНОЕ УСТРОЙСТВО | 1990 |
|
RU2008538C1 |
| Шаговый электродвигатель с колеблющимся ротором | 1989 |
|
SU1628159A1 |
| Клещевой захват для удержания и перемещения материала | 1982 |
|
SU1013047A1 |
| Манипулятор | 1986 |
|
SU1315228A1 |
Изобретение относится к захватным устройствам, применяемым в манипуляторах для захвата и перемещения изделий произвольной формы, и может быть использовано в машиностроении. Целью изобретения является расширение технологических возможностей за счет обеспечения возможности захвата деталей сложной конфигурации. Захват манипулятора состоит из корпуса 1, на котором шарнирно закреплены на осях 2 и 3 двуплечие ры- чаги 4 и 5. Двуплечий рычаг 4 одним своим плечом шарнирно связан с корпусом 6 цилиндра 7 привода, а двуплечий рычаг 5 плечом, диагонально противоположным указанному плечу рычага 4, шарнирно связан с подвижным штоком 8. Зажимные элементы 9 установлены шарнирно на концах двуплечих рычагов 4 и 5. При открытом захвате двуплечие рычаги 4 и 5 располагаются вертикально, взаимодействуя с упорами корпуса. При подаче давления в полость приводного цилиндра 7 корпус 6 и шток 8 перемещаются навстречу друг другу, что приводит к повороту рычагов 4 и 5 вокруг оЬей 2 и 3. Поворот рычагов происходит до тех пор, пока зажимные элементы 9 не коснутся поверхности изделия. Освобождение изделия из захвата осуществляется подачей давления в другую полость цилиндра 7 привода, и двуплечие рычаги 4 и 5 занимают исходное положение. 5 ил. (Л
Фие.1
Пяобрстет нс относится к захнат- ным устройстпам, применяемым в манипуляторах для захвата и перемещения изделий произвольной формы, и может быть использовано в машиностроении.
Целью изобретения является расширение технологических возможностей за счет обеспечения захвата деталей сложной формы.
На фиг. 1 изображена принципиальная схема захвата з плане; на фиг. 2 - вариант исполнения зажимных 3. TeNreHTOB; фиг. 3, 4, 5 - схемь; расчета поверхности за:. Имных элементов ,
Захват манипулятора состоит из корпуса 1, ка котором шарнирно за- крспле1(1 на осях 2 и 3 двуплечие ры- -itar; ,{ 5. Двуплечий рычаг А одним саоим : лечом шарнирно связан с корпусом 6 силового цилиндра 7, а двуплечий pi,4ar 5 - плечом, диагонально противоположным указанному плечу рычага , шарнирно связан с подв1г кным LiTOKOM 8. Зажимные элементы 9 установлены на кспидах двуплечих рычагов - и 5.
Захват работает следующим образом
При открытом яахвате двуплечие рычаги ч I 5 располагаются вертикально, взaи oдeйcтвyя с упорами корпуса. При по;г.аче давления в полость силового цилиндра 7 корпус 6 и шток 8 переме 11а;стси навстречу друг другу, уменьшает расстоя;п1е АВ, что приводит к повороту рычагов А и 5 вокруг осей 2 и 3. Г о:и;рот рычагоз может происходить нерапномерно и до тех пор, пока элементы не коснутся по- вер ности изделия. В зависимости от и размеров изделия захват может осуществляться как четырьмя, так и тремя зажимными элементами, причем при фиксированном положении язделия, благодаря действию зажи -1ных элементов корпус захвата будет смещаться в требуемом направлении. Освобождение изделия из захвата осуп(ествля- ется подачет - давления в подштоковую
полость силового цилиндра
за счет
чего уве.г1И1 ивается расстояние АВ, и двуплечие вдчаги 4 и 5 заки;.ают исходное положение.
Если зажимные элементы установлены на 1и ечах рычагов как на направляющих с возможностью закрепления их в произвольно выбранном месте плеча, то, изменяя положение зажимных элементов относительно оси вращения рычагов, выбирая тем самым базы, захват можно настроить на работу с изделием произвольной конфигурации таким образом, что при осущест- i влении захвата не возникает необходимости изменять положение изделия или (при фиксированном изделии) положение корпуса захвата.
Q Зажимные элементы могут быть выполнены таким образом, чтобы при любом диаметре захватываемого цилиндрического изделия его поверхность и поверхности двух участков зажимного
5 элемента имели общую образующую - прямую. Это достигается следующим обра зом.
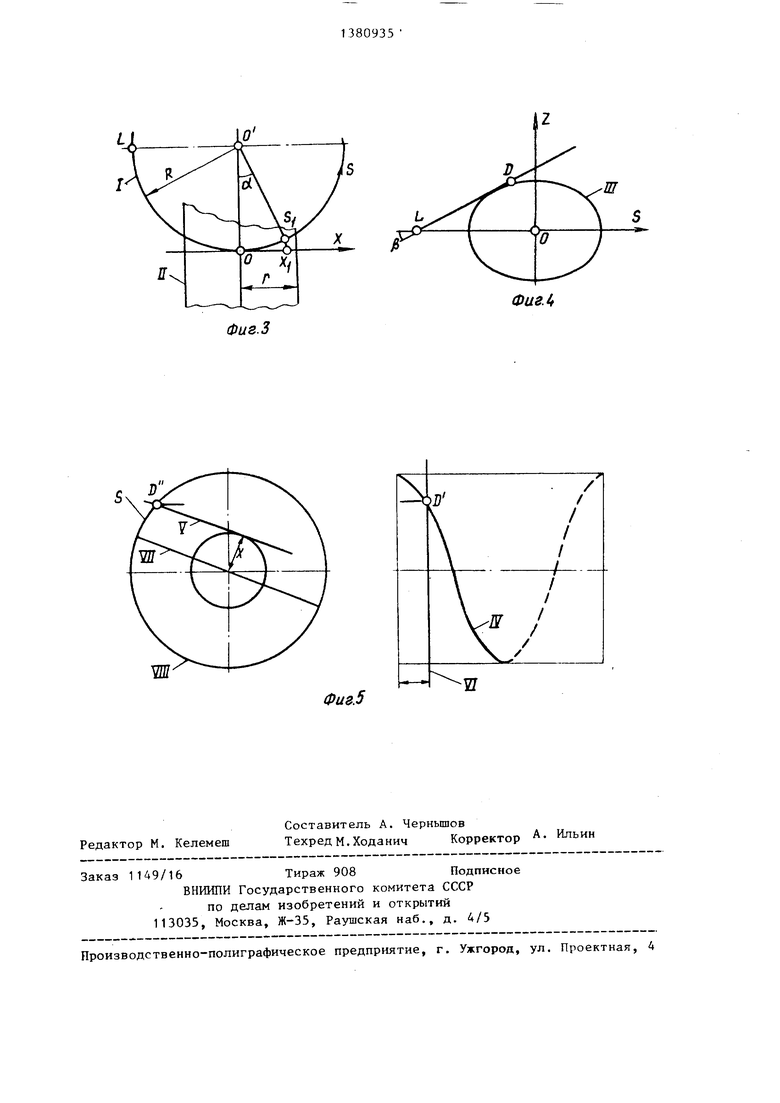
Пусть I г окружность - проекция винтовой линии с радиусом R и углом
0 подъема л на плоскость, перпендикулярную ее оси; II - проекция цилиндрического изделия с радиусом г на ту же плоскость; А - цилиндр радиуса R, проекция которого совпа5 дает с I; В - цилиндр радиуса г, проекция которого совпадает с II.
Тогда проекция линии пересечения цилиндров А и в на плоскость XOZ зада- - ется уравнением окружности
0
Х2 -f- Z2 г.
Установим связь между системами координат XOZ и SOZ:
ОХ, lO O I- sinc ;
V
lO SJ 10 о I X R sin(
; S
R
Линия III пересечения цилиндров A и В в координатах SOZ определяется уравнением
Z2 -(- R2. sin () г R
Винтовая линия, лежащая на цилиндре А и касательная к цилиндру В, в координатах SOZ имеет вид прямой, пересекающейся с осью S в точке L под углом f и имеющей общую точку D с кривой III.
Преобразовав уравнение кривой III, получим
55
ir R sin l-l-),
К
т.е. Z f(S).
Тогда условие касания выр ажается следующим образом:
dZ
или
tp. уь . , 2S , sin(-)
Для угла подъема /i 45° получим в координатах XOZ:
Z2 + (R2 - г2 - |)2 ;
Х2 R2 - R R2 - г5 .
Исключая параметр г, получим Z2 |1 (R2 - хО.
Итак, искомая поверхность имеет своей направляющей винтовую линию IV с радиусом R и углом подъема /5 , образующая поверхности - прямая V, лежащая в плоскости VI, перпендикулярной оси винтовой линии, причем в этой плоскости образующая V и параллельный ей диаметр VII окружности VIII, являющейся проекцией вик- товой линии на плоскость VI, заключают между собой дугу, длина которой определается соотношением
tR р 9с;
sin()
5
0
5
0
Z2
(R - Х).
iw- - Ф
п
Для случая, когда /3 45 , положение Z плоскости VI и расстояние X между осью винтовой линии и образующей связано соотношением
Х2
R2
Формула изобретения
Захват манипулятора, содержащий корпус, два двуплечих рычага, шар- нирно закрепленных на корпусе, дне пары зажимных элементов и привод в виде силового цилиндра, отличающийся тем, что, с целью расширения технологических возможностей, один из рычагов шарнирно связан
с корпусом силового цилиндра ОДН1- М
из своих плеч , а другой рычаг шарнир- . но связан с штоком силового цилиндра плечом, противоположным плечу первого рычага, причем перемещение рычагов в сторону максимального раскрытия захвата ограничено дополнительно введенными упорами, установленными на корпусе захвата, а зажимные элементы установлены шарнирно непосредственно на плечах рычагов.
Фиг.З
Фие.5
Ш
ФигЛ
| Захват | 1983 |
|
SU1117206A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
