водную тележку 4 с приводной платформой 5, установленной в дополнительных направляющих 3 самоходного шасси 1. На цапфах 13 предплечья 8 установлен корпус 14 дополнительного силового щ линдра 15 вращательного перемещения, который шарнирно соединен с двумя силовыми цилиндрами 17 ее качания, расположенными шарнирно на предплечье 8. Основная направляющая 19, соединенная с валом 18 дополнительного силового цилиндра 15, имеет размещенную в ней механическую руку 20 с установленным в
1
Изобретение относится к роботостроению и может быть использовано для выполнения монтажных,погрузочно- разгрузочных работ, для обслуживания металлорежущего,кузнечно-прессового, литейного, складского оборудования, конвейеров и автоматических линий, для окраски и нанесения покрытий и дЛя выполнения различных технологических, в том числе и строительных, транспортных операций.
Цель изобретения - повышение производительности за счет уменьшения рабочей зоны пространственного пере- ме щения крупногабаритных- изделий.
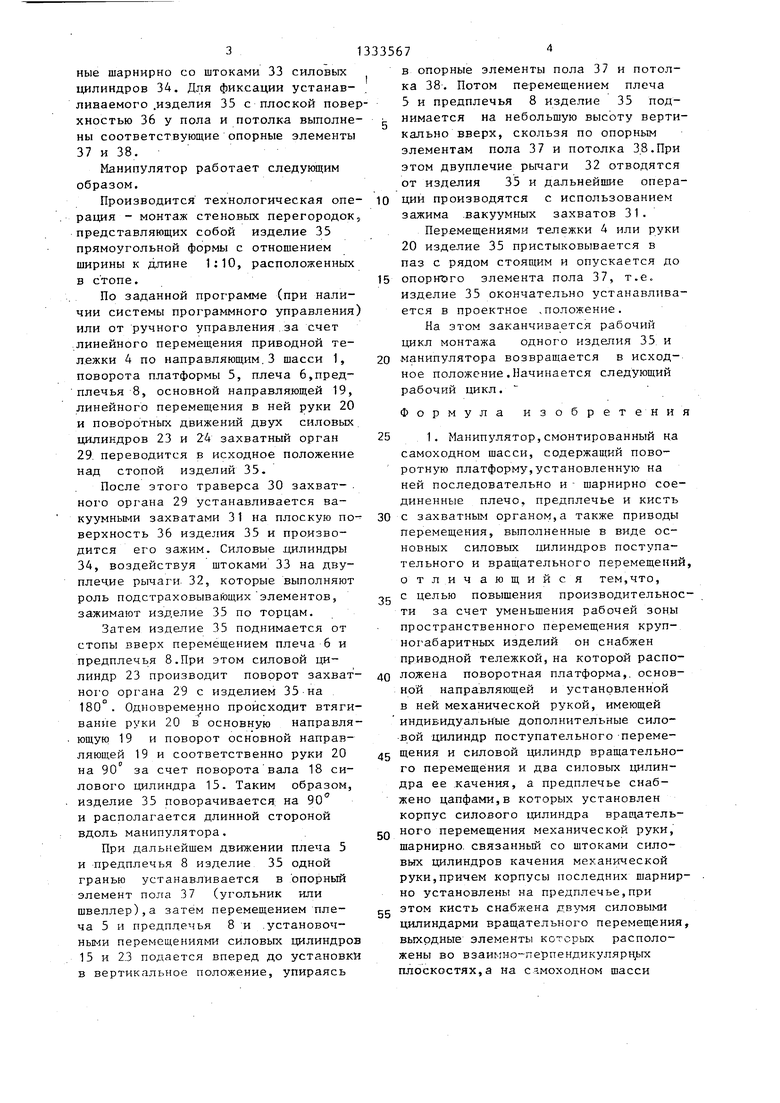
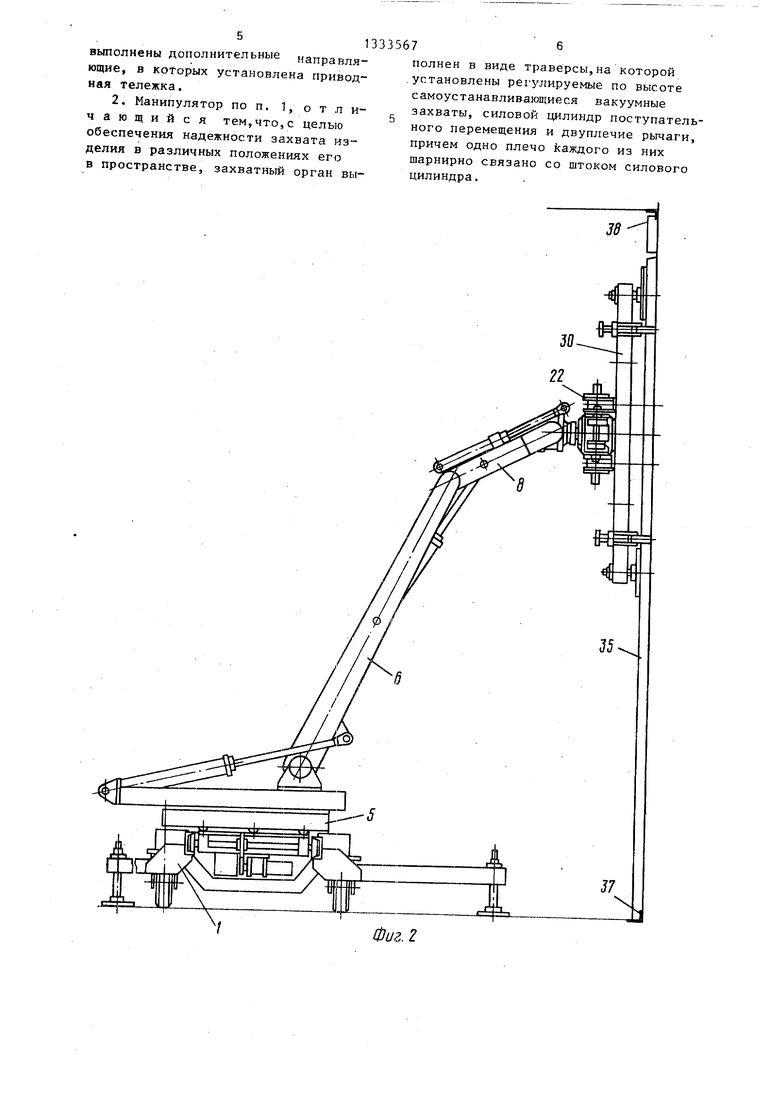
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - то же, положение при монтаже стен;на фиг. 3 - то же,при монтаже потолка плитами; на фиг. 4 - то же ,при монтаже пола плитами; на фиг. 5 - вид А на фиг. 1 на фиг. 6 - разрез Б-Б на фиг. 5| на фиг. 7 - узел 1 на фиг. 1; на фиг. 8 - вид В на фиг. 7;на фиг. 9 - вид Г на фиг. 1;на фиг. 10 - разрез Д-Д на фиг. 1; на фиг, 11 - разрез Е-Е на фиг. 10.
Манипулятор содержит самоходное шасси 1 с аутригерами 2 и дополнительными направляюпщми 3,в которых размещена приводная тележка 4 с установленной на ней поворотной платформой 5. Плечо 6 одним концом шарнирно закреплено в опоре 7 платформы 5, а другим .шарнирно соединено с предплечьем 8. Основные силовые
ней дополнительным силовым цилиндром 21 поступательного перемещения. Кисть механической руки 20 содержит два силовых цилиндра 23 и 24 вращательного перемещения,выходные элементы которьп расположены в двух взаимно-перпендикулярных плоскостях с соединением корпуса 28 силового цилиндра 23 с выходным элементом силового цилиндра 24, а выходной элемент силового цилиндра 23 соединен с траверсой 30 захватного органа 29. 1 3.п. ф-лы, 11 ил.
цилиндры 9 привода перемещения плеча 6,шарнирно установленные в кронштейнах 10 платформы 5,штоками 11 соединены с плечом 6. Основной цилиндр 12 привода перемещения предплечья 8 шарнирно соединен с плечом 6 и предплечьем 8.
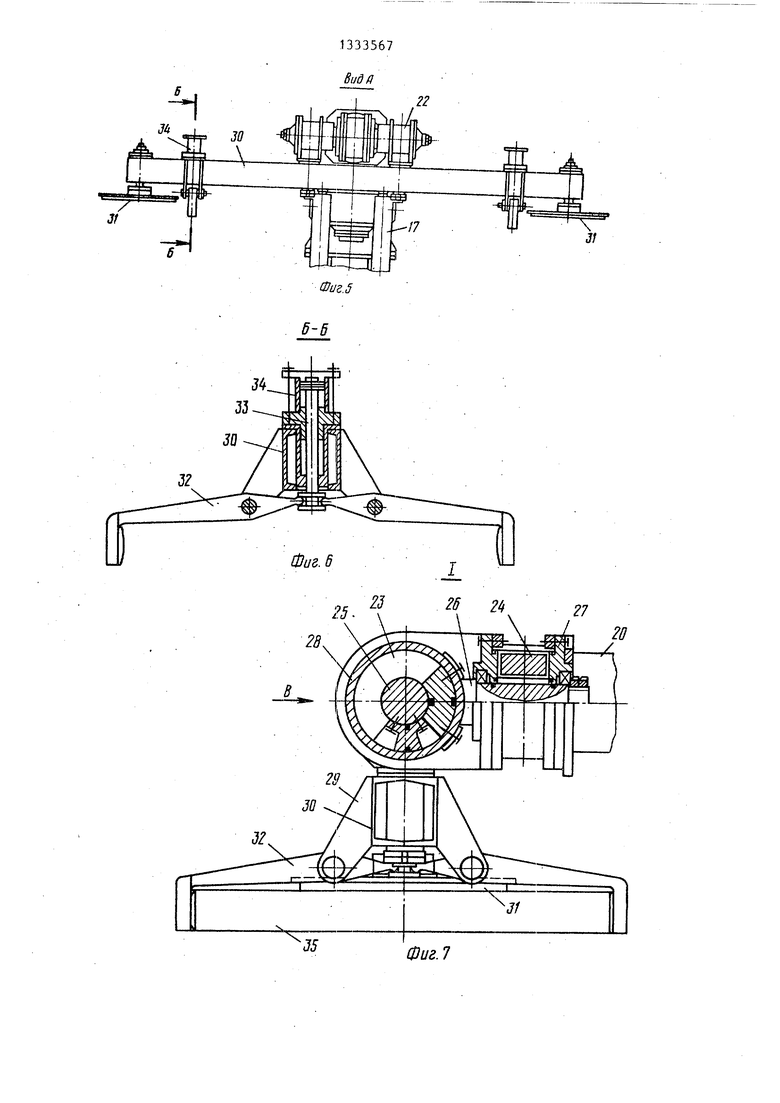
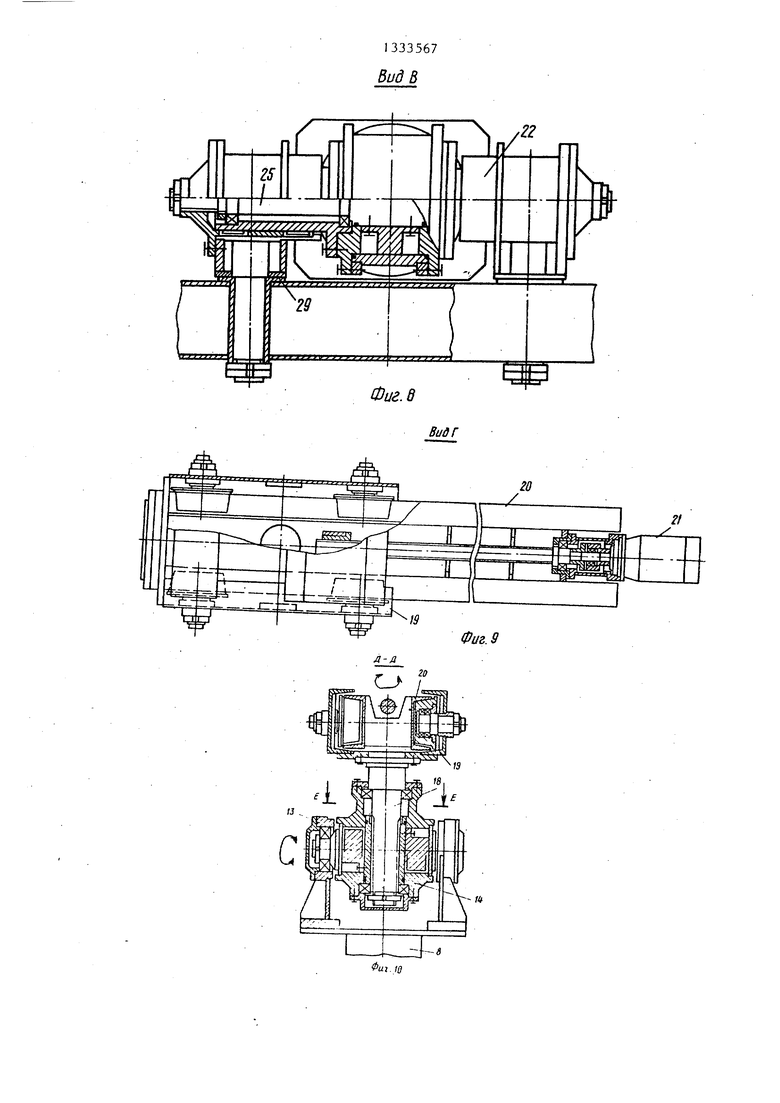
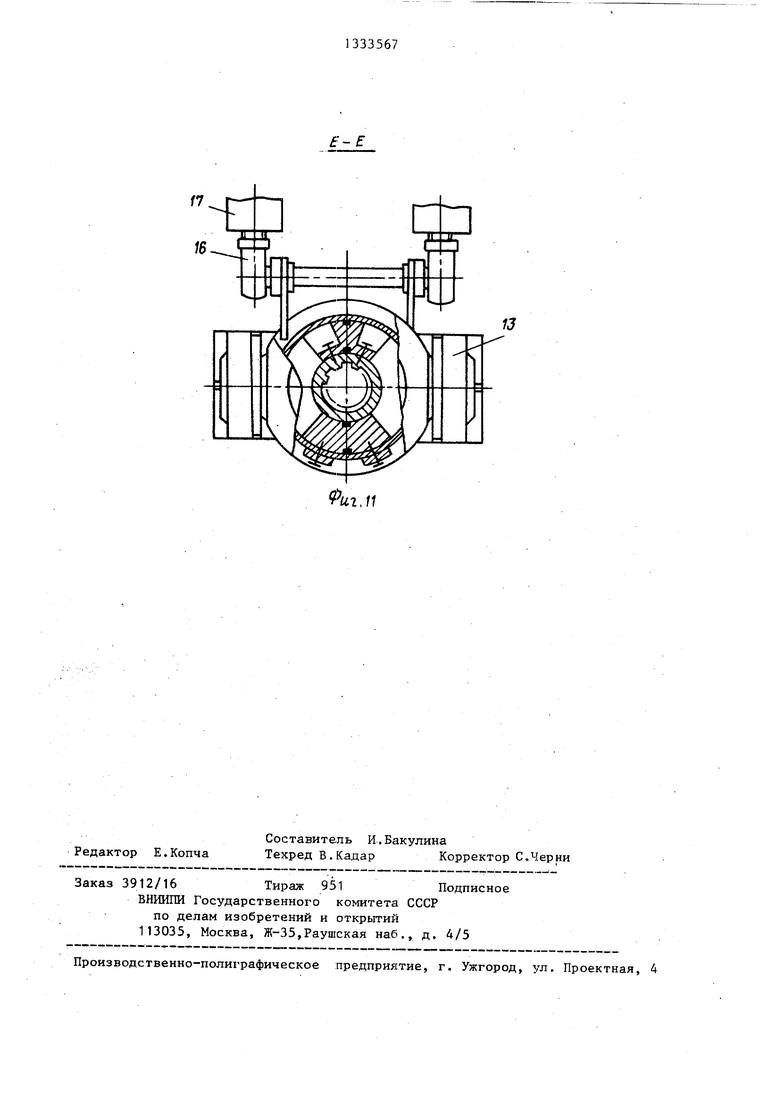
На цапфах 13 предплечья 8 установлен корпус 14 дополнительного силового цилиндра 15 вращательного перемещения, шарнирно соединенный со штоками 16 дополнительных силовых цилиндров 17 его качения.
Вал 18 дополнительного .силового цилиндра 15 вращательного перемещения соединен с основной направляющей 19, в которой установлена механическая рука 20 с дополнительным силовым цилиндром 21 поступательного перемещения .
Кисть 22 механической руки 20 содержит два силовых . цилиндра 23 и 24 вращательного перемещения,выходные элементы 25 и 26 которых расположены во взаимно перпендикулярных плоскостях. Корпус 27 одного силового цилиндра 24. соединен с рукой 20, а выходной элемент 26 соединен с корпусом 28 другого цилиндра 23.
Захватный: орган 29, соединенный с выходным элементом 25 силового цилиндра 23, выполнен в виде траверсы 30, на балке которой установлены регулируемые по в.ысоте самоустанавливающиеся вакуумные захваты 31 и зажимные двуплечие рычаги 32,связан
3
ные шарнирно со штоками 33 силовых цилиндров 34. Для фиксации устанавливаемого .изделия 35 с плоской пове хностью 36 у пола и потолка выполнены соответствующие опорные элементы 37 и 38.
Манипулятор работает следующим образом.
Производится технологическая операция - монтаж стеновых перегородок представляющих собой изделие 35 прямоугольной формы с отношением ширины к длине 1;10, расположенных в стопе.
По заданной программе (при наличии системы программного управления или от ручного управления.за счет линейного перемещения приводной тележки 4 по направляющим.3 шасси 1, поворота платформы 5, плеча 6,предплечья 8, основной направляющей 19, линейного перемещения в ней руки 20 и поворотных движений двух силовых цилиндров 23 и 24 захватный орган 29. переводится в исходное положение над стопой изделий 35.
После этого траверса 30 захват- Hoi o органа 29 устанавливается вакуумными захватами 31 на плоскую поверхность 36 изделия 35 и производится его зажим. Силовые 1далиндры 34, воздействуя штоками 33 на двуплечие рычаги- 32, которые выполняют роль подстраховывающих элементов, зажимают изделие 35 по торцам.
Затем изделие 35 поднимается от стопы вверх перемещением плеча 6 и предплечья 8.При этом силовой цилиндр 23 производит поворот захватного органа 29 с изделием 35-на 180°. Одновременно происходит втягивание руки 20 в основную направляющую 19 и поворот основной направляющей 19 и соответственно руки 20 на 90 за счет поворота вала 18 силового цилиндра 15. Таким образом, изделие 35 поворачивается; на 90° и располагается длинной стороной вдоль манипулятора.
При дальнейшем движении плеча 5 и предплечья 8 изделие 35 одной гранью устанавливается в опорный элемент пола 37 (угольник или швеллер),а затем перемещением плеча 5 и предплечья В и .установочными перемещениями силовых цилиндров 15 и 2.3 подается вперед до установки в вертикальное положение, упираясь
335674
в опорные элементы пола 37 и потолка 38. Потом перемещением плеча 5 и предплечья 8 изделие 35 под- нимается на небольшую высоту вертикально вверх, скользя по опорным элементам пола 37 и потолка 38.При этом двуплечие рычаги 32 отводятся от изделия 35 и дальнейшие опера10 ции производятся с использованием зажима .вакуумных захватов 31.
Перемещениями тележки 4 или руки 20 изделие 35 пристыковывается в паз с рядом стоящим и опускается до
15 опорного элемента пола 37, т.е.
изделие 35 окончательно устанавливается в проектное .положение.
На этом заканчивается рабочий цикл монтажа одного изделия 35. и
20 манипулятора возвращается в исходное положение.Начинается следующий рабочий цикл.
Формула изобретения
25 1. Манипулятор,смонтированный на самоходном шасси, содержащий поворотную платформу,установленную на ней последовательно и шарнирно соединенные плечо, предплечье и кисть
30 с захватным органом,а также приводы перемещения, выполненные в виде основных силовых пилиндров поступательного и вращательного перемещений, отличающийся тем,что.
с целью повышения производительности за счет уменьшения рабочей зоны пространственного перемещения крупногабаритных изделий он снабжен приводной тележкой, на котороз расположена поворотная платформа,, основной направляющей и установленной в ней механической рукой, имеющей индивидуальные дополнительные сило- -врй цилиндр поступательного -перемещения и силовой цилиндр вращательного перемещения и два силовых цилиндра ее качения, а предплечье снабжено цапфами,в которых установлен корпус силового цилиндра врап;ательного перемещения механической руки, шарнирно. связанный со штоками силовых цилиндров качения механической руки,причем корпусы последних шарнирно установлены на предплечье,при
этом кисть снабжена цвумя силовыми цилиндарми вращательного перемещения, выходные элементы которых расположены во взаимно-перпендикулярн ых плоскостях,а на самоходном шасси
s1
вьтолнены дополнительные направляющие, в которых установлена приводная Тележка.
2. Манипулятор по п. , отличающийся тем,что,с целью обеспечения надежности захвата изделия в различных положениях его в пространстве, захватный орган вы33567
полнен в виде траверсы,на которой .установлены регулируемые по высоте самоустанавливающиеся вакуумные захваты, силовой цилиндр поступательного перемещения и двуплечие рычаги, причем одно плечо каждого из них шарнирно связано со штоком силового цилиндра,
5
Фиг. 2
ФигЛ
Фиг.7
Вид В
22
Фиг. 6
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| Манипулятор | 1988 |
|
SU1546249A1 |
| Манипулятор | 1990 |
|
SU1816262A3 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Распалубочное приспособление | 1985 |
|
SU1303420A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Траверса | 1989 |
|
SU1726350A1 |
| Манипулятор | 1983 |
|
SU1159242A1 |
| УСТРОЙСТВО для УСТАНОВКИ и ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ ПРЕДМЕТОВ | 1971 |
|
SU312818A1 |
Изобретение относится к роботостроению и может быть использовано для вьтолнения монтажных,погрузочно- разгрузочных работ, для обслуживания металлорежущего,кузнечно-прессо- вого, литейного,складского оборудования, конвейеров и автоматических линий, для окраски и нанесения покрытий и для вьтолнения различных технологических, в том числе и строительных ,транспортных операций.Целью изобретения является повьшение производительности за счет уменьшения рабочей зоны пространственного перемещения крупногабаритных изделий. Для этого манипулятор содержит прис ( (Л 2Q ЕЭ Фиг.
20
f/
Фиг. 9
--
s
г
Редактор Е.Копча
Составитель И.Бакулина
Техред В.Кадар Корректор С.Черни
Заказ 3912/16 Тираж 951Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,Раушская наб., д, 4/3
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1979 |
|
SU823116A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
