На фиг. 1 изображена кинематическая) вокруг осей 2 и 3 При повороте, например, рычага k его конец (точка А ) перемещается в точку А. Соответственно противоположный конец рычага k перемещается из точки В1 в точку В.Ана- на фиг. 2 - захват с зажатым пред- 15 логично поворачивается рычаг 5, занисхема адаптивного захвата с зажатым предметом, штрихпунктиркой линией с двумя точками показано положение под- 1вижных звеньев при раскрытом захвате;
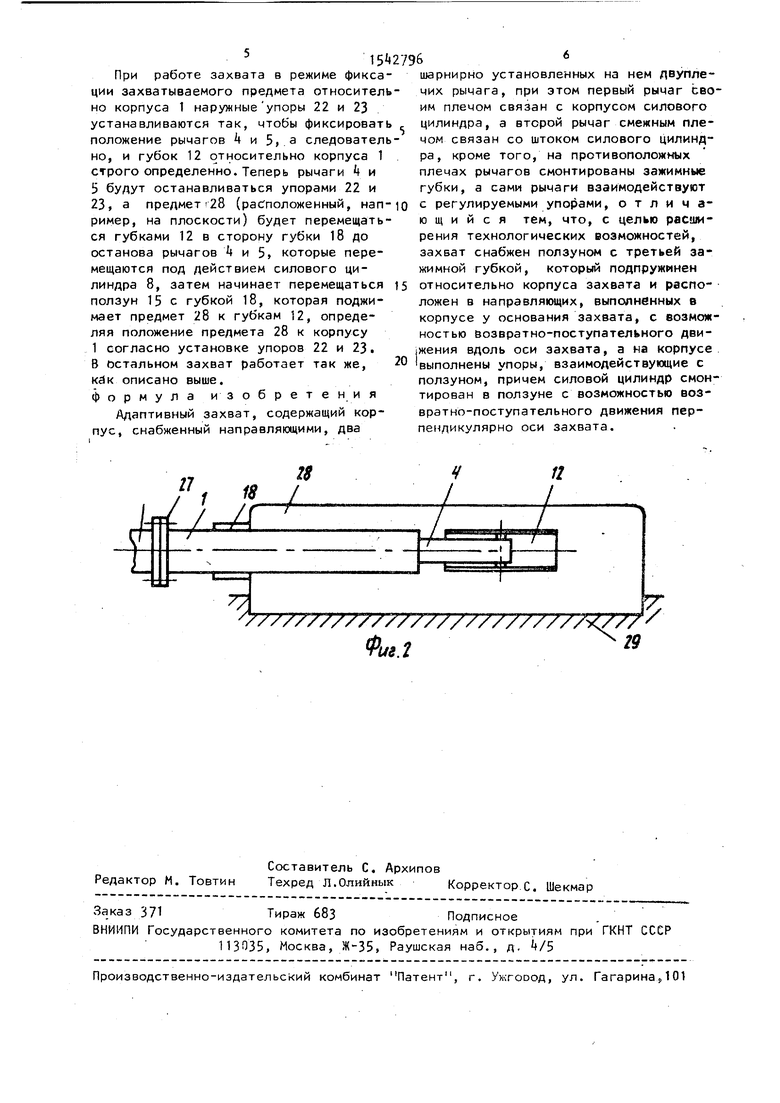
метом, находящимся в гнезде, вид сбоку.
Адаптивный захват состоит из корпуса 1, на котором шарнирно закреплемая положение EY, при этом зажимные губки 12 упираются в предмет 28 (расположенный, например, в гнезде 29), поворачиваясь вокруг шарниров и рае./
и
ны на осях 2 и 3 двуплечие рычаги k и 20 тягивая пружины 25. После того, как 5. Двуплечий рычаг k одним плечом шарнирно связан посредством шатуна 6 с корпусом 7 силового цилиндра 8, а двуплечий рычаг 5 одним плечом (смежным
точки В и Е остановятся, точки С D продолжают перемещаться, при этом шатуны 6 и 9, поворачиваясь вокруг точек В и Е, перемещают цилиндр 8,
по отношению к плечу 4) шарнирно свя- 25 а вместе с ним ползун 15 до тех пор,
пока зажимная губка 18 не упрется в предмет 28. Пружины 2, создавая сопротивление перемещению ползуна 15, обеспечивают его движение после останова рычагов k и 5, что обеспечивает надежное удержание предмета рассматриваемой конфигурации. После этого рука манипулятора перемещает захват с предметом-28. Для устранения возможного произвольного перемещения зажа того предмета 28 совместно с подвижными звеньями относительно корпуса 1 при перемещении захвата, вследствие действия инерционных сил, рычаги k и 5 могут быть подпружинены относительно корпуса 1, или может быть использовано регулируемое трение в любой из кинематических пар механизма.
«30
(зан посредством шатуна 9 с подвижным (штоком 10, соединенным с поршнем 11 цилиндра 8. Шатуны 6 и 9 расположены под углом (более 90° и менее 1806) к оси силового цилиндра 8. В данном конкретном устройстве угол выбран 135
На свободных плечах рычагов k и 5 шарнирно установлены ;зажимные губки 12. На корпусе 1 расположены направляющие ,13 и 14, в которых расположен с возможностью возвратно-поступательного перемещения вдоль захвата ползун 15, в
котором в направляющих 16 и 17 расположен цилиндр 8 с возможностью возвратно-поступательного перемещения поперек захвата. На ползуне 15 установлена зажимная губка 18.
С корпусом 1 жестко связаны внут-. ренние упоры 19 20 и упоры 21. В корпусе 1 установлены с возможностью регулирования наружные упоры 22 и 23. Ползун 15 подпружинен относительно корпуса 1 пружинами 2А. Для фиксации зажимных губок 12 относительно рычагов 4 и 5 на каждом из них расположены пружины 25, прижимающие зажимные губки к упорам 26, жестко соединенным с рычагами. На корпусе 1 расположен фланец 27 (фиг. 2) для креплений захвата на руке манипулятора
40
45
50
пока зажимная губка 18 не упрется в предмет 28. Пружины 2, создавая соп ротивление перемещению ползуна 15, обеспечивают его движение после оста нова рычагов k и 5, что обеспечивает надежное удержание предмета рассматриваемой конфигурации. После этого рука манипулятора перемещает захват с предметом-28. Для устранения возможного произвольного перемещения зажа того предмета 28 совместно с подвижными звеньями относительно корпуса 1 при перемещении захвата, вследствие действия инерционных сил, рычаги k и 5 могут быть подпружинены относитель но корпуса 1, или может быть использовано регулируемое трение в любой из кинематических пар механизма.
Процесс освобождения предмета 28 при укладке происходит при подаче давления в подштоковую полость цилинд ра 8, при этом шток 10 с поршнем 11 корпус 7, цилиндр 8, двигаясь навстре чу друг другу, уменьшают расстояние CD. Шатуны 6 и 9 поворачивают рычаги k и 5 до соприкосновения их с упорами 19 и 20,после этого фатумы поворачива ются вокруг точек В и Е , перемещая цилиндр 8 и ползун 15 в крайнее левое положение. Ползун 15 может двигаться
Захват работает следующим образом. 55 под действием пружин 24 быстрее, чем
Раскрытый захват (зажимные губки раздвинуты) занимает положение А1, В , С , U , Е , Г . При подаче даврыча ги и 5,и дойти до упоров 21,но конечное положение захвата в любом случае будет однозначным,т,е. A , Bf, C ,B , EЈF
мая положение EY, при этом зажимные губки 12 упираются в предмет 28 (расположенный, например, в гнезде 29), поворачиваясь вокруг шарниров и рае./
и
тягивая пружины 25. После того, как
точки В и Е остановятся, точки С D продолжают перемещаться, при этом шатуны 6 и 9, поворачиваясь вокруг точек В и Е, перемещают цилиндр 8,
25 а вместе с ним ползун 15 до тех пор,
30
40
45
50
пока зажимная губка 18 не упрется в предмет 28. Пружины 2, создавая сопротивление перемещению ползуна 15, обеспечивают его движение после останова рычагов k и 5, что обеспечивает надежное удержание предмета рассматриваемой конфигурации. После этого рука манипулятора перемещает захват с предметом-28. Для устранения возможного произвольного перемещения зажатого предмета 28 совместно с подвижными звеньями относительно корпуса 1 при перемещении захвата, вследствие действия инерционных сил, рычаги k и 5 могут быть подпружинены относительно корпуса 1, или может быть использовано регулируемое трение в любой из кинематических пар механизма.
Процесс освобождения предмета 28 при укладке происходит при подаче давления в подштоковую полость цилиндра 8, при этом шток 10 с поршнем 11 и корпус 7, цилиндр 8, двигаясь навстречу друг другу, уменьшают расстояние CD. Шатуны 6 и 9 поворачивают рычаги k и 5 до соприкосновения их с упорами 19 и 20,после этого фатумы поворачиваются вокруг точек В и Е , перемещая цилиндр 8 и ползун 15 в крайнее левое положение. Ползун 15 может двигаться
55 под действием пружин 24 быстрее, чем
под действием пружин 24 быстрее, чем
рыча ги и 5,и дойти до упоров 21,но конечное положение захвата в любом случае будет однозначным,т,е. A , Bf, C ,B , EЈF
При работе захвата в режиме фиксации захватываемого предмета относительно корпуса 1 наружные упоры 22 и 23
шарнирно установленных на нем двуплечих рычага, при этом первый рычаг своим плечом связан с корпусом силового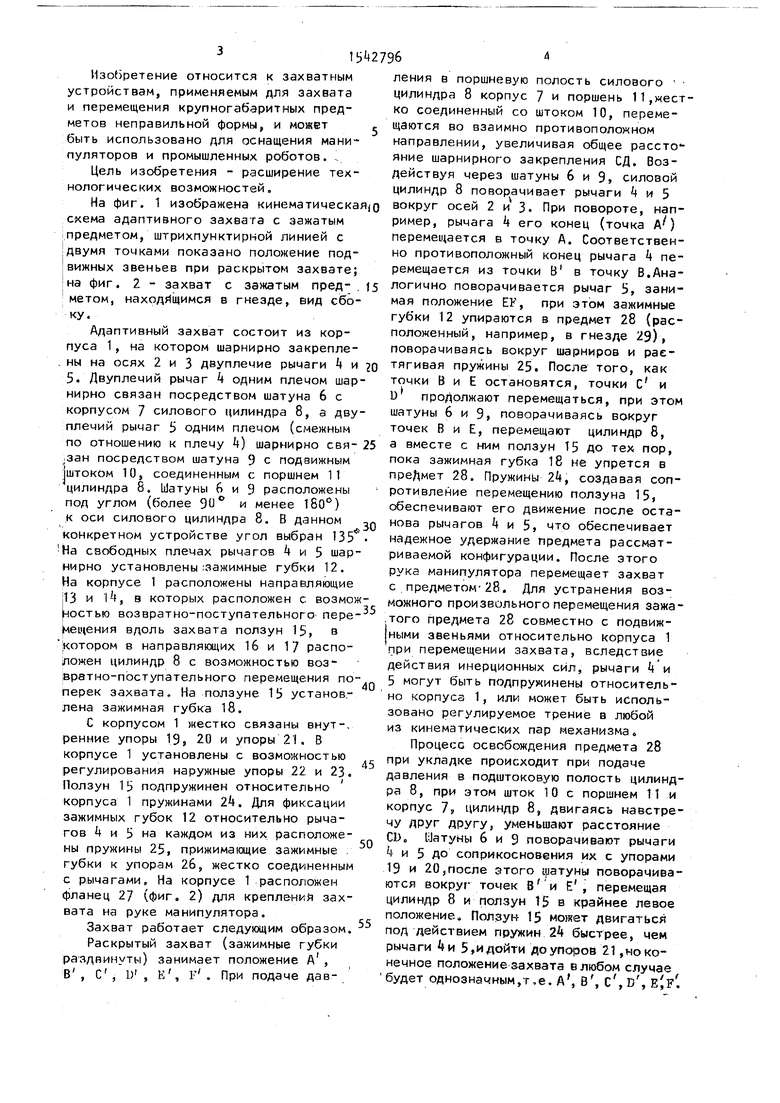
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1987 |
|
SU1503948A1 |
| Устройство для установки радиоэлементов на печатные платы | 1988 |
|
SU1631766A1 |
| Машина для косого срезания подошв и приставок к ним | 1956 |
|
SU107187A1 |
| Устройство для формирования и закрутки петли на проводах или проволоке | 1980 |
|
SU961827A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Устройство для зачистки и закрутки концов электромонтажных проводов | 1980 |
|
SU943950A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
Изобретение относится к захватным устройствам и может быть использовано для оснащения манипуляторов и промышленных роботов. Цель изобретения - расширение технологических возможностей. На корпусе 1 шарнирно закреплены двуплечие рычаги 4, 5. На одном плече каждого рычага смонтирована зажимная губка 12, а другое плечо одного рычага соединено посредством шатуна 9 со штоком 10 силового цилиндра, а другого рычага - с корпусом 7 силового цилиндра. Ход рычагов 4, 5 ограничен регулируемыми упорами 22, 23. В ползуне 15 расположен с возможностью возвратно-поступательного движения поперек захвата силовой цилиндр. Ползун 15 смонтирован в направляющих 13, 14 корпуса у основания захвата с возможностью возвратно-поступательного движения вдоль оси захвата. Корпус 1 снабжен упором 21, ограничивающим ход ползуна 15, при этом ползун подпружинен относительно корпуса 1 и на нем установлена третья зажимная губка. 2 ил.
устанавливаются так, чтобы фиксировать е цилиндра, а второй рычаг смежным плечом связан со штоком силового цилиндра, кроме того, на противоположных плечах рычагов смонтированы зажимные губки, а сами рычаги взаимодействуют
положение рычагов k и 5, а следовательно, и губок 12 относительно корпуса 1
и и
строго определенно. Теперь рычаги k 5 будут останавливаться упорами 22
предмет 28 (расположенный, нап-ю с регулируемыми упорами, о т л и ч а23, а
ример, на плоскости) будет перемещаться губками 12 в сторону губки 18 до останова рычагов и 5, которые перемещаются под действием силового цилиндра 8, затем начинает перемещаться ползун 15 с губкой 18, которая поджимает предмет 28 к губкам 12, определяя положение предмета 28 к корпусу 1 согласно установке упоров 22 и 23. В остальном захват работает так же, кик описано выше, формула изобретения
Адаптивный захват, содержащий корпус, снабженный направляющими, два
ю щ и и с я тем, что, с целью расширения технологических возможностей, захват снабжен ползуном с третьей зажимной губкой, который подпружинен
15 относительно корпуса захвата и расположен в направляющих, выполненных в корпусе у основания захвата, с возможностью возвратно-поступательного дви- (жения вдоль оси захвата, а на корпусе
20 выполнены упоры, взаимодействующие с ползуном, причем силовой цилиндр смонтирован в ползуне с возможностью возвратно-поступательного движения перпендикулярно оси захвата.
ю щ и и с я тем, что, с целью расширения технологических возможностей, захват снабжен ползуном с третьей зажимной губкой, который подпружинен
относительно корпуса захвата и расположен в направляющих, выполненных в корпусе у основания захвата, с возможностью возвратно-поступательного дви- (жения вдоль оси захвата, а на корпусе
выполнены упоры, взаимодействующие с ползуном, причем силовой цилиндр смонтирован в ползуне с возможностью возвратно-поступательного движения перпендикулярно оси захвата.
| Схват робота | 1983 |
|
SU1117205A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
