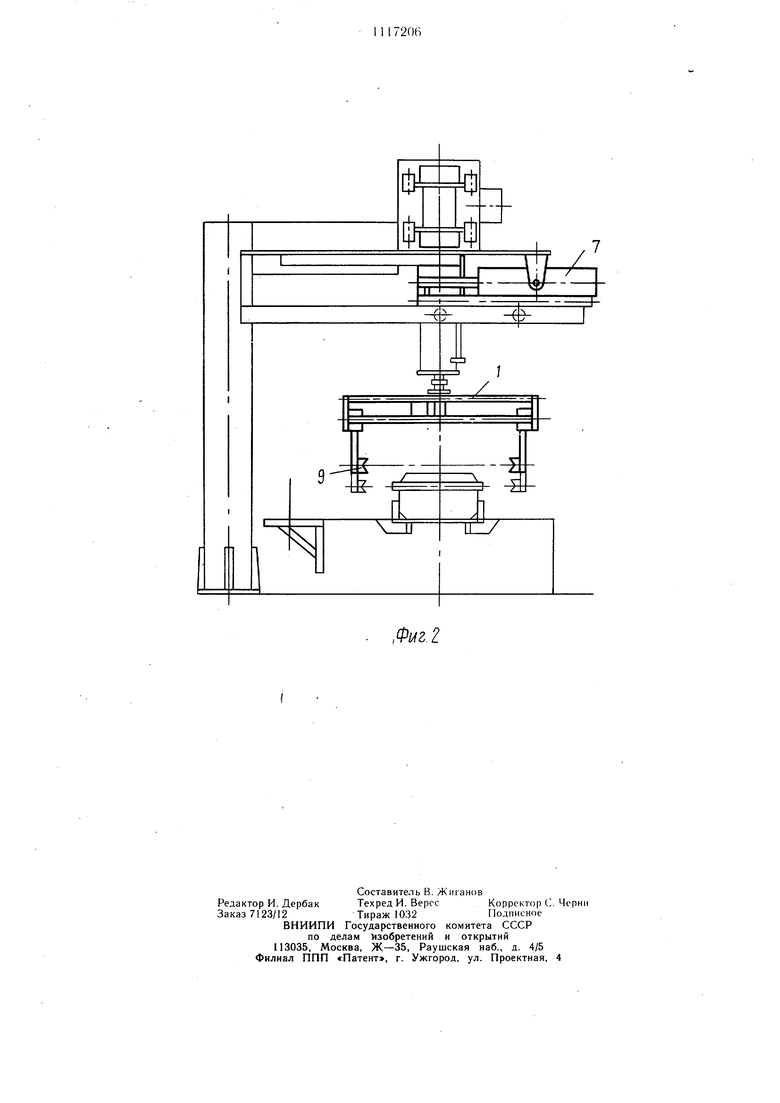
Изобретение относится к захватным устройствам, применяемым в манипуляторах для захвата и перемещения крупногабаритных изделий неправильной формы, и может быть использовано для автоматизации про цессов перегрузки светильников специальных конструкций. Известен захват манипулятора, содержащий корпус, две пары зажимных губок, каждая из которых установлена на своей оси, закрепленной в корпусе и силовой цилиндр в качестве привода 1. Однако известный захват характеризуется сложностью конструкции, так как связь между приводом (сдвоенным силовым шлиндром) и парами губок содержит травер:сы, ползун, обоймы С гайкнми и винты, установленные в корпусе захвата; возмож|ностыо захвата и перемещения только деталей, имеющих форму тел вращения, т. е. не обеспечивает захват и перемещение крупногабаритных изделий сложной конфигурации. Цель изобретения - упрощение конструкции и pacпJиpeниe технологических возможностей. Поставленная цель достигается тем, что захват манипулятора, содержащий корпус, две пары зажимных губок, каждая из которых связана с приводом в виде силового цилиндра, снабжен двумя шарнирно уста;новленпыми на корпусе двуплечими рычагами, при этом первый рычаг своим пле;чом связан шарнирно с корпусом силового цилиндра, а второй рычаг, плечом, смежjHbiM с указанным плечом первого рычага, связан с подвижным щтоко.м силового циШиндра, а корпус захвата снабжен направ;ляющими, причем каждая зажимная губка, щарнирно связанная тягой с плечом рычага, установлена с возможностью возвратнопоступательного перемещения по направляюихей. На фиг. 1 изображена принципиальная схема захвата манипулятора, план; на фиг. 2 -- конструктивное исполнение манипулятора с захватом. Захват манипулятора состоит из корпуса 1, на котором шарнирно закреплены на осях 2 и 3 горизонтальные двуплечие рычаги 4 и 5. Двуплечий рычаг 4 одним своим плечом щарнирно связан с корпусом 6 силового цилиндра 7, а двуплечий рычаг 5 одним своим плечом (смежным по отношению к плечу рычага 4) щарнирно связан с подвижным щтоком 8 цилиндра 7. Зажимные губки 9 установлены с возможностью возвратно-поступательного перемещения по направляющим 10 и 11, установленным в корпусе захвата, и шарнирно соединены с двуплечими рычагами 4 и 5 посредством тяг 12. Захват работает следующим образом. Раскрытый захват (зажимные губки 9 раздвинуты) занимает положение А, В, С для одной из губок. При подаче давления в полость силового цилиндра 7 корпус 6 и шток 8 перемещаются во взаимно противоположно.м направлении, увеличивая общее расстояние шарнирного закрепления DE, что приводит к повороту рычагов 4 и 5 вокруг осей 2 и 3. При повороте, например, рычага 5 его конец (точка А) перемещается в точку А. Соответственно, конец тяги 12 (точка В) перемещается по прямолинейной направляющей 11 в точку В. а зажимная губка 9 (точка С) - в точку С. Аналогично перемещается зажимная губка на другом конце рычага 5 и зажимные губки, связанные с рычагом 4. Процесс освобождения светильника при укладке происходит при подаче давления в подштоковую полость силового цилиндра, и, соответственно, при уменьшении расстояния DE и перемещении зажимных губок по направляющим на периферию от центральной оси светильника. Положительным эффектом предлагаемого технического рещения является упрощение конструкции захвата и расщирение его технологических возможностей. Перемещение губок происходит неравномерно и до тех пор, пока они не соприкоснутся с ободом светильника, причем соприкосновепие может быть и неодновременным при непрекращаюпдейся подаче давления в полость цилиндра, зажимные губки сдвигают до полного его зажима с четырех сторон или, при зафиксированном положении светильника, перемещают руку манипулятора в требуемом направлении, что дает возможность захватить светильники любой конфигурации.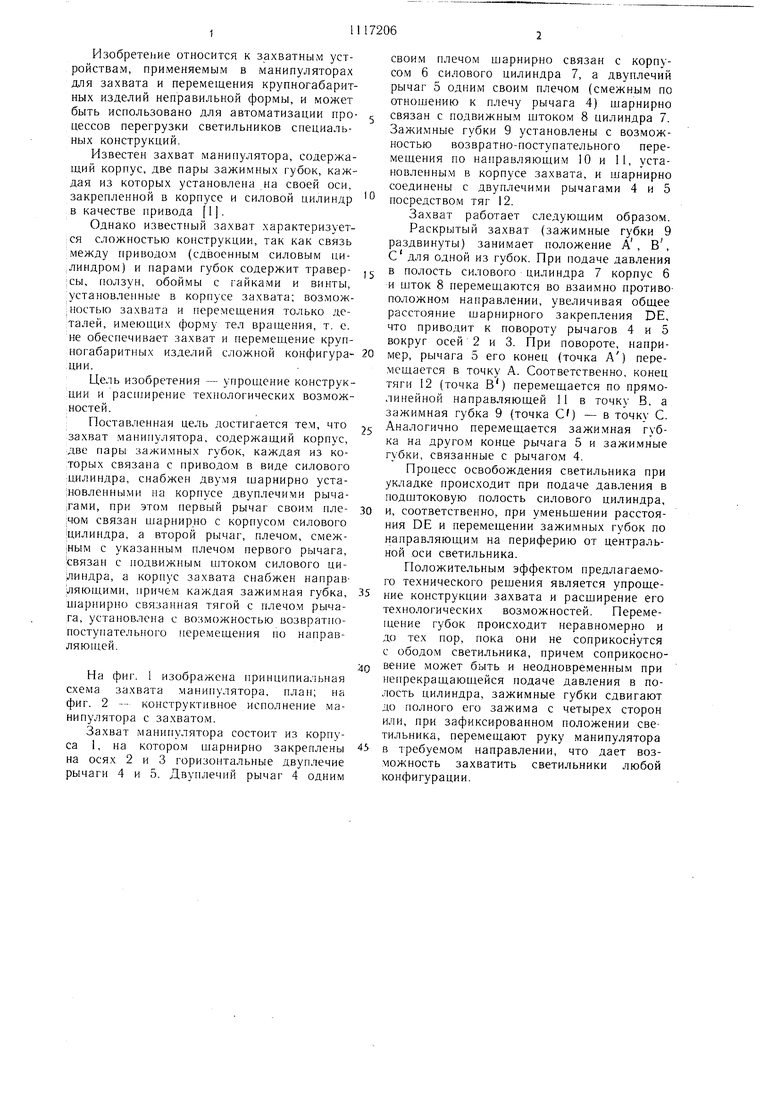
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Захват | 1980 |
|
SU905061A1 |
| Манипулятор | 1988 |
|
SU1546249A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Перегрузчик формодержателей | 1980 |
|
SU1006164A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захват манипулятора | 1978 |
|
SU722758A1 |
ЗАХВАТ манипулятора, содержащий корпус, две пары зажимных губок, связанных с приводом в ьиде силового цилиндра, отличающийся тем, что, с целью упропления конструкции и расширения технологических возможностей, захват снабжен двумя шарнирно установленными на корпусе двуплечими рычагами, при этом первый рычаг своим плечом связан шарнирно с корпусом силового цилиндра, а второй рычаг плечом, смежным с указанным плечом первого рычага, связан с подвижным штоком силового цилиндра, а корпус захвата снабжен направляюш,ими, причем каждая зажимная губка, шарнирно связанная тягой с плечом рычага, установлена с возможностью возвратно-поступательного перемещения по направляюш.ей. S (Л to о 05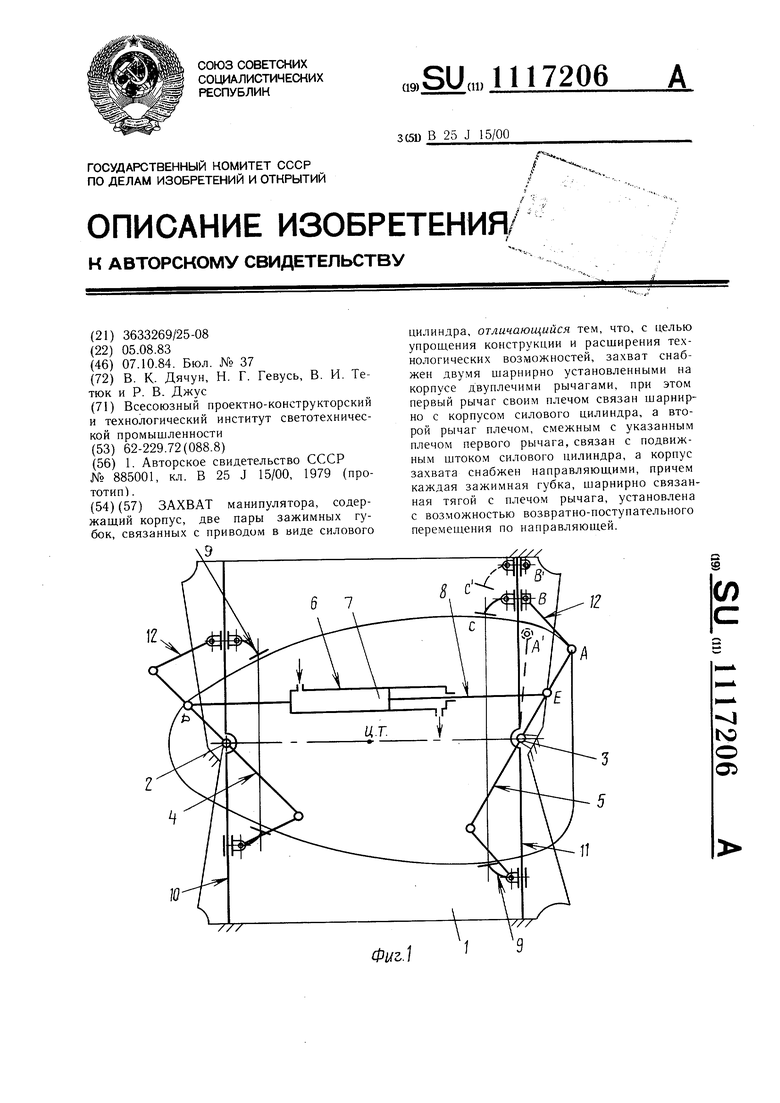
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват | 1980 |
|
SU885001A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
