/
Z2 /i-A
(Л
г5
со
00
ел 
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Клещевой захват-кантователь длягРузОВ | 1979 |
|
SU829541A1 |
| Грузозахватное устройство для монтажа строительных конструкций | 1974 |
|
SU557034A1 |
| Захват-кантователь | 1989 |
|
SU1726358A1 |
| Захват-кантователь для грузов цилиндрической формы | 1987 |
|
SU1504199A1 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| Грузозахватное устройство | 1986 |
|
SU1384520A1 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |
| Клещевой захват-кантователь для штучных грузов | 1985 |
|
SU1299938A2 |
Изобретение относится к подъемно-транспортной технике, в частности к клещевым захватам-кантователям для I грузов. Целью изобретения является повышение удобства эксплуатации за счет обеспечения возможности регулированию угла поворота груза. При вращении валов 19 гибкая лента 24 будет сматываться с основных барабанов 20 и наматываться на дополнительные барабаны 21, или наоборот, при этом стойки 11 за счет взаимодействия роликов 25 с гибкой лентой 24, намотанной на-основной барабан 20, будет опускаться или соответственно подниматься. 3 ил.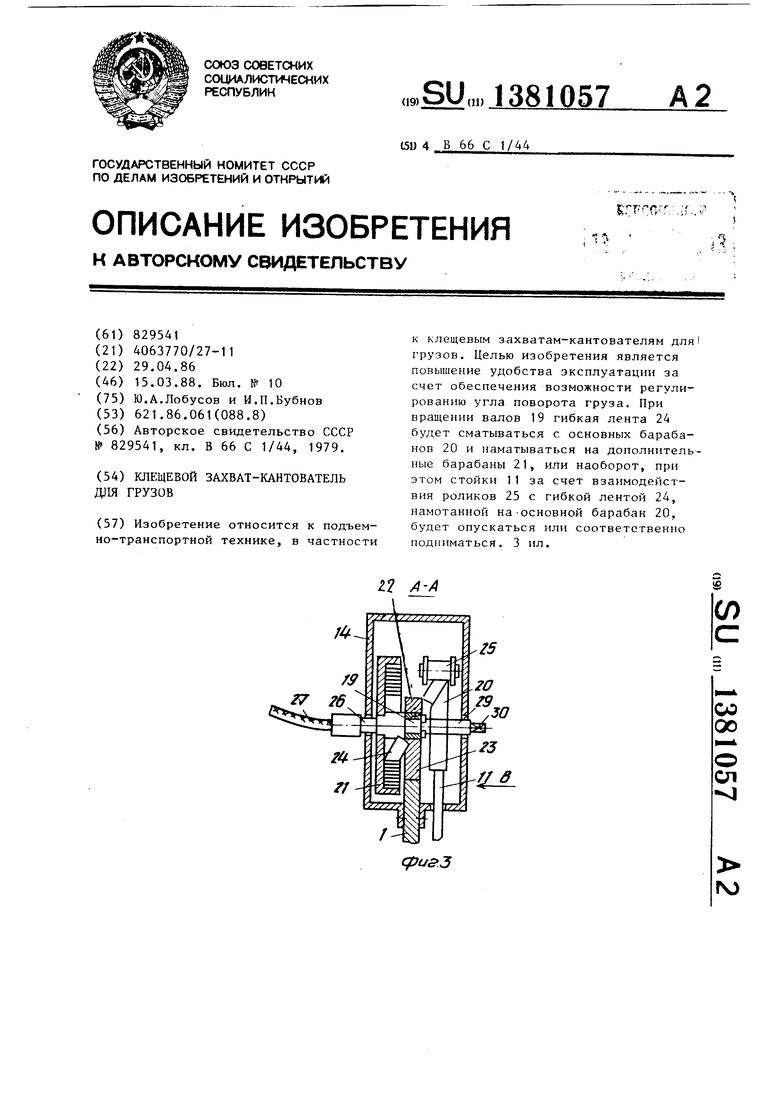
СриэЗ
ГО
Изобретение относится к под7)емио- транспортной технике, в частности к клещевым захватам-кантователям для грузов, и являются усовсригенстнивл- нием изобретения по авт. св. fv 8295 i
Цель изобретения - гювьплеиио ства эксгтлуатации за счет обеспечения гюзможпости регу,:п1рования угла попорота тфуза.
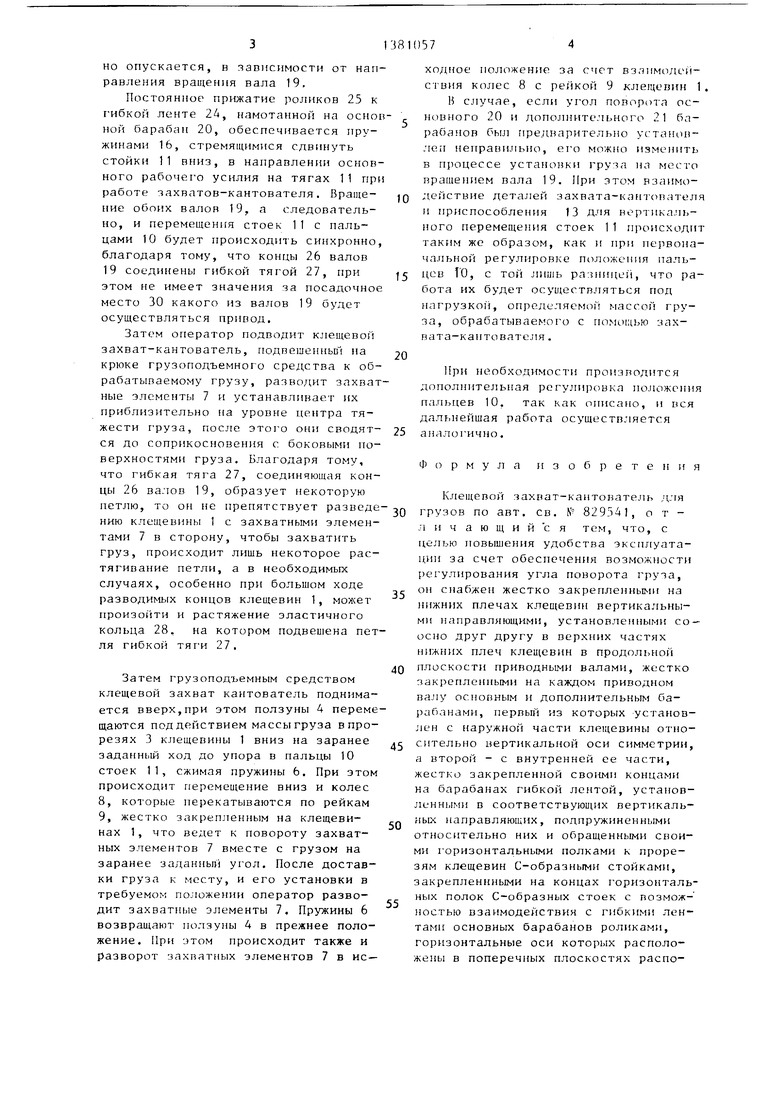
На фиг, 1 изображен общий вид кле1цевс.ч о захвата-кантователя длч
грузов; на фиг,
о
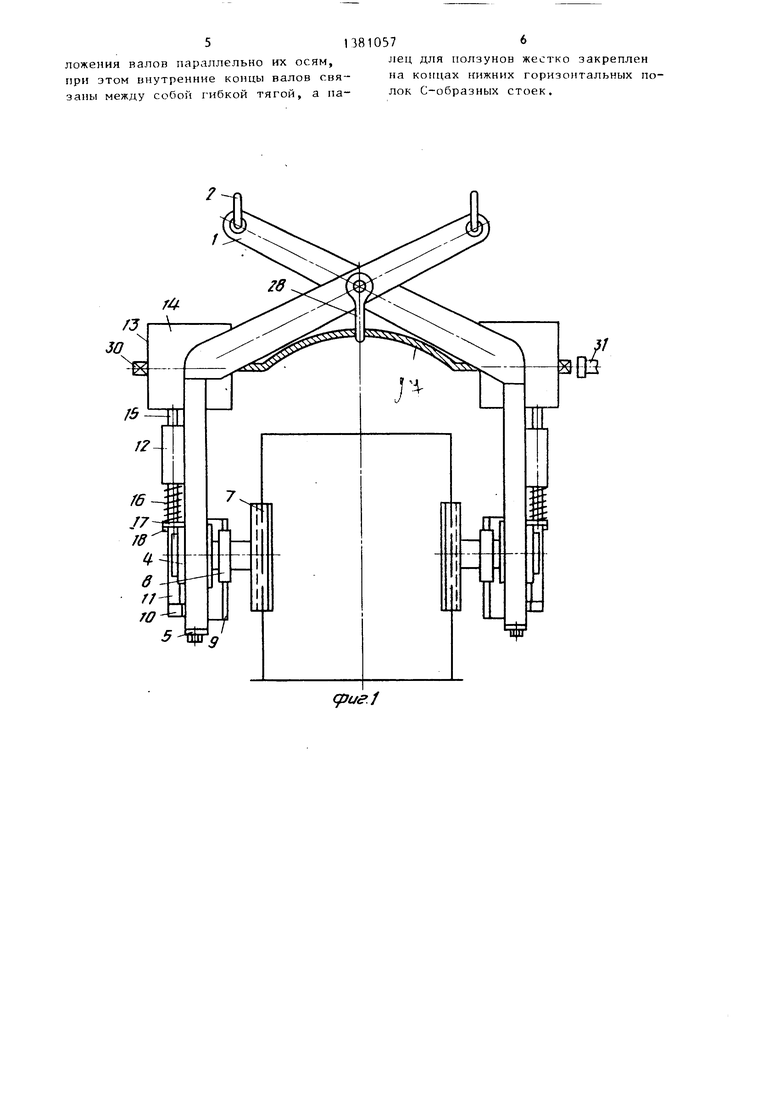
то же, вид ciMjKy ,
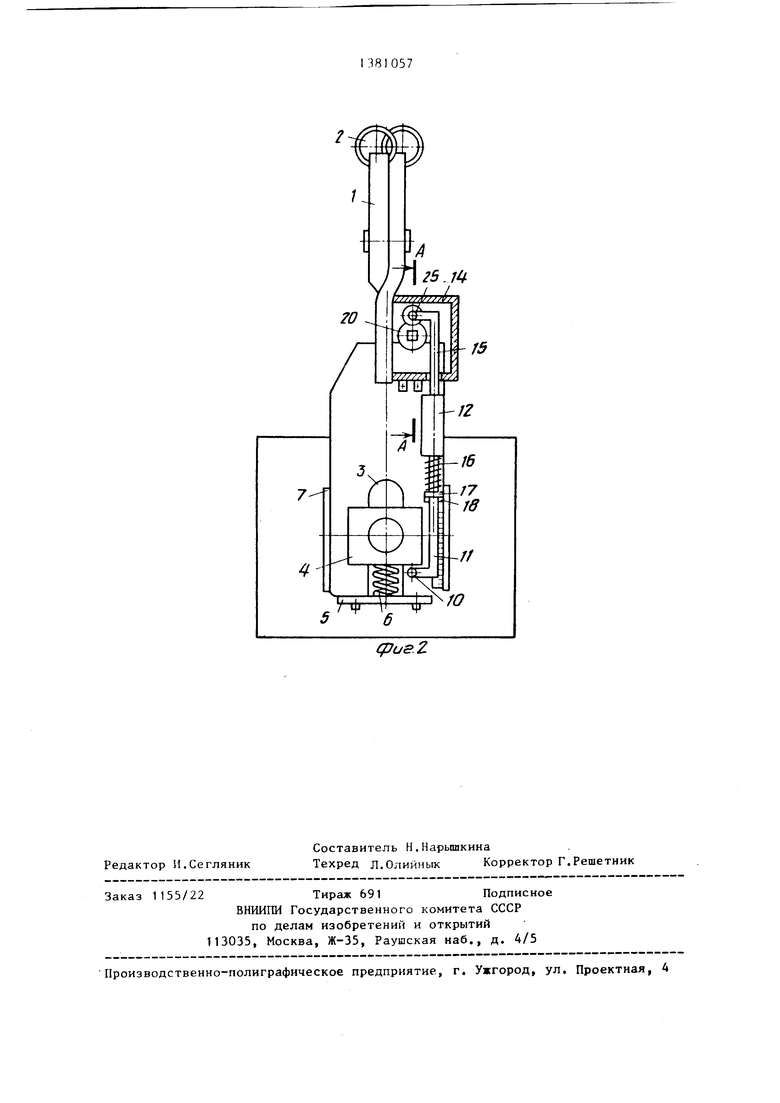
на (})иг, 3 - разрез Л-х на фиг. 2.
Клощевой захват-кантователь ДJfя грузов включает .две шарнирно соединенные к;1е1це:п1ны 1 шарнирными гягпм 2. В нижнеГт ласти каждой клещевины I плиолнена прорезь 3, в KOTopoi i установлен ползун 4, поднр жиненпы вверх (vrHociiTC ii io пластиьЛ) 5, /кест- ко установленной на клещевине 1, npv uiHofi b. Ползуны 4 несут ионорот- иьк захвл ные элементы 7. Причем K;IA ;;Ы , 3лх)ьтгны; | элемент 7 снабжс-н зуО- чат|;1м KO iec ciM 8. находящимся и запл 1 . С нии зуйчато; реГ|Ксч 1 9, жес1Л .:о зак рсплснно; ; на клещевине 1 . К;,1чД,,чя клещогплна 1 с 1аб;кена нальнем 10,жеш ко установленным на С-образной ст; ;|- ке i 1 , p -i - i ieHHo с возможное гью lu-p I HK.iribHoro пере -к и ения в B(:/;i i i:- са.П)Но1- на 1раи;1Я| :1 :1ей 12, жестк) -.к Пч- ренленую на клещевине 1 . Ка;кда ; клещевина 1 снабжена нр)исгюсс бл( 13 для вертикального перемещения стоек 11, закрыгым кожухом 14, закреп- ле1И1ом на клещевине 1 ви1ггами. Верхние 1сонн,ы 15 стсмлс 11 взаимо 1е1 1ству- ют с (,1олениями 13. C/roiiKH 11 нодпружин ны Hpy.-fviiHarui 16 в сторону oOecpieHeii iiM силовш о замь кания liepx- ыих кондор, 15 стоек 11 с приспособлениями 1J д:1я вертика.чьного перемещения стсн к 11. Пру/кины 16 размещены на CToiiKax 1 1 и унираются одним концом в вертикальные нанравлянкцие 12. а другим - н упорные :iia;i6bi 17. фиксируемые н осевом нанравле1И1и штифтами 18. установле.н)П)1ми в стойках 11
Каждое нриеноеоб.чение 13 /ичя вер- тикальног о перемещения стоек 1 1 вклюлае жестко закрепленные на валу 19 осн(лзной 20 и донолнительных 21 барабано. г ал 19 установлен е возможностью в)ащен11я во втулке 22, размещснноГ в стойке 23, жестко зак- pernieHinn i на каждли клещевине 1 . Причем оси палов 19 размещены нерпеиди
5
0
5
0
5
0
5
0
5
кулирно нерти :альной оси захвата. На ос ю. п чм барабане 20 закренлен один к(1нед I ленты 24, а другой ее (;онец зак;хл1лен на дополнительном барабане 21, в котором гибкая лента 24 расположена рулоном таким образом, ;то н, рулона ленты 24 соо-1-ветствует диаметул основного б;1рабана 20. Час:ть гибкой ленты 24, навито на OCHOBHOI I барабан 20, взан- моде1 1ствует с. POJHIKOM 23, установленным с возможностью .ращения на конце гoглi oптaJ:I,нoй полки стоГпчи 1 1 . Таким образом, каждая стойка 11 оказы- вас тся как бы подвешс нной своей го- шзонтально на основном ба- р;пь:1нс 20 с HajiHTbW на нем iy:ioHOM гибксч . iLMrri.i 24, и 1C тому же, гюд- пружи1к;нно ; вниз нруж;иноГ1 16, обеспе- чина;1: :11ч постчзянное взаиг-дадействие рол .ПчП 25 (.: рулоном гпбко11 ленты 24 на ослювном барабане 20.
1чоп:;ы 26 валов 19 кинематически снязчин между co6oi i, например, гибкой тягой 27, подвс-шена в ; ,ней ласти на э.частичном ;.i :nj: ,c 2ci и месте шарнирного соеди- --.ч.и;- :f. 1. Противоположные, т.е. Н1.ход;11; е конды 29 валоп, 19 снаб- .:;1ДоЧ1Н/ МИ местами 30, вынол- нем;и ;,, гапример, в квадрата, (.чн ди; епия с приволом 31, кото- pb:ii мож(.:т быть выполнен, например, ручн1,1м, 15 виде рукоятки, или снабжен сеу)вол.вигателем (не показано) для ме- ;4а пг;аппи операди по кантованию грузов .
Клепево захват-кантователь для г 1узов (5тает следующим образом. Перед началом работы нроизводят установку нальцев 10 на требуемьп1 угчз.т попорота г руза. Для этого вращают i5,b i 19 за iiocaj;o4Hoe место 30. При этом, и зависимости от направле- 1П1Я 1 ра цения, гибкая лента 24 будет смать;ваться с допо1Н)ительного барабана 21 и наматываться на основной барабан 20, или же наоборот сматы- Г)а1л,ся с основного барабана 20 и на- матч;1вачЧ)Ся на доно.чнит ельный барабан 2 1 , при1П1мая благ одаря упруг ой де- фо 1мад1Н1 наибольший диаметр. При этом, cT OiiKa 11 с па.пТ)Цем 10 за счет взаммо действия ролика 25., установленного па верхнем конде горизонтальной полки 11, с частью гибкой ленты 24, намотанной на основной барабан 20, или поднимается, или же соответственно опускается, н яаоиснмости от направления вращения вала 19,
Постоянное прижатие роликов 25 к г ибкой ленте 24, намотанной на осно ной барабан 20, обеспечивается пружинами 16, стремящимися сдвинуть стойки 11 вниз, в направлении основного рабочего усилия на тягах 11 пр работе захватов-кантователя. Враще- пне обоих валов 19, а следовательно, и перемещения стоек 11 с пальцами 10 будет происходить синхронно благодаря тому, что концы 26 валов 19 соединены гибкой тягой 27, при этом не имеет значения за посадочно место 30 какого из валов 19 будет осуществляться привод.
Затем оператор подводит клещевой захват-кантователь, подвешенный на крюке грузоподъемного средства к обрабатываемому грузу, разводит захватные элементы 7 и устанавливает их приблизительно на уровне центра тяжести груза, после этого они сводят- ся до соприкосновения с боковыми поверхностями груза. Благодаря тому, что гибкая тяга 27, соединяющая концы 26 валов 19, образует некоторую петлю, то он не препятствует разведе нию клещевины I с захватными элементами 7 в сторону, чтобы захватить груз, происходит лишь некоторое растягивание петли, а в необходимых случаях, особенно нрп больщом ходе разводимых концов клещевин 1, может Г1роизо1 1ти и растяжение эластичного кольца 28, на котором подвешена петля гибкой тяги 27.
Затем грузоподъемным средством
клещевой захват кантователь поднимается вверх,при этом ползуны 4 перемещаются под действием массы груза в прорезях 3 клещевины 1 вниз на заранее заданный ход до упора в пальцы 10 стоек 11, сжимая пружины 6. При этом происходит перемещение вниз и колес
8,которые перекатываются по рейкам
9,жестко закрепленным на клещевинах 1, что ведет к повороту захватных элементов 7 вместе с грузом на заранее заданньш угол. После доставки груза к месту, и его установки в требуемом положении оператор разводит захватные элементы 7. Пружины 6 возвращают ползуны 4 в прежнее положение. При этом происходит также и разворот захватных элементов 7 в ис-
IQ
20 25 OQ
40
дс
35
50
5
ходное положение за счет взаимодействия колес 8 с рейкой 9 клещевин 1.
В случае, если угол поворота основного 20 и допо:шите:1ьного 21 барабанов был предварительно установ- ;ien неправильно, ei o можно изменить в процессе уста11О} ки i-руза на место вращением вала 19. При этом взаимодействие деталей захвата-кантователя и приспособления 13 для вертикального перемещения стоек 11 происходит таким же образом, как и при первоначальной регулировке положения пальцев Го, с той Jniijib разницей, что работа их будет осуи;ествляться под нагрузкой, определяемой массой груза, oбpaбaтывae югo с помощью захвата-кантователя .
При необходимости производится допол1П1тельная рсгу;шровка положения пальцев 10. так как описано, и вся дальнейшая работа осуществляется аналогично.
Формула изобретения
Клещевой захват-кантователь для грузов по авт. св. № 829341, о т - л и ч а ю щ и и с я тем, что, с целью ттовышения удобства эксплуатации за счет обеспечения возможности регулирования угла поворота груза, он снабжен жестко закрепленными на )1ижних плечах клещевин вертикальными направляющими, установленными со- осно друг другу в частях нижних плеч клещевин в продольной плоскости приводными валами, жестко закрепленными на каждом приводном валу основным и дополнительным барабанами, первьй из которых установлен с Е1аружной части клещевины относительно вертикальной оси симметрии, а второй - с внутренней ее части, жестко закрепленной своими концами на барабанах гибкой лентой, установленными в соответствующих вертикальных направляющих, подпружиненными относительно них и обращенными своими горизонтальными полками к прорезям клещевин С-образными стойками, закрепленнными на концах г оризонталь- ных полок С-образных стоек с позмож- ностью взаимодействия с гибкими лентами основных барабанов роликами, горизонтальные оси которых расположены в поперечных плоскостях распопри этом внутренние концы валов связаны между собой гибкой тягой, а паqjue.l
на концах нижних горизонтальных полок С-образных стоек.
| Клещевой захват-кантователь длягРузОВ | 1979 |
|
SU829541A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
