(54) ЗАХВАТ-РАСКЛАДЧИК ДЛЯ ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375249A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Многопозиционный штамп для обработки штучных заготовок | 1980 |
|
SU940950A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
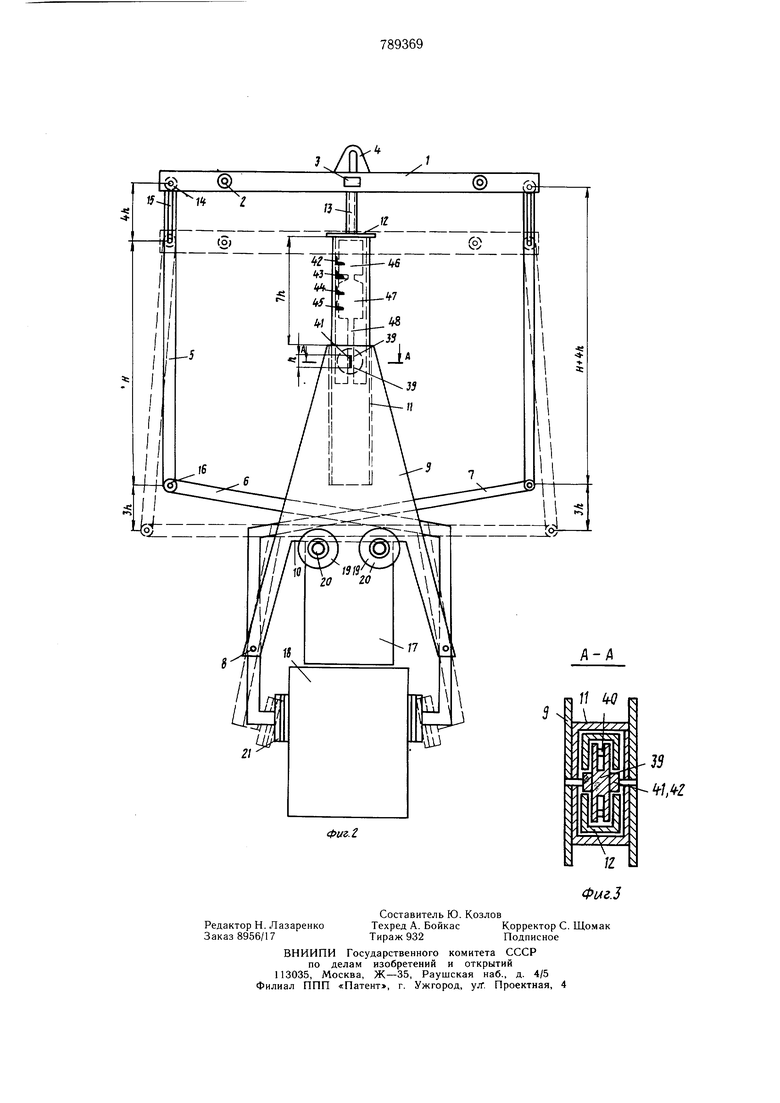
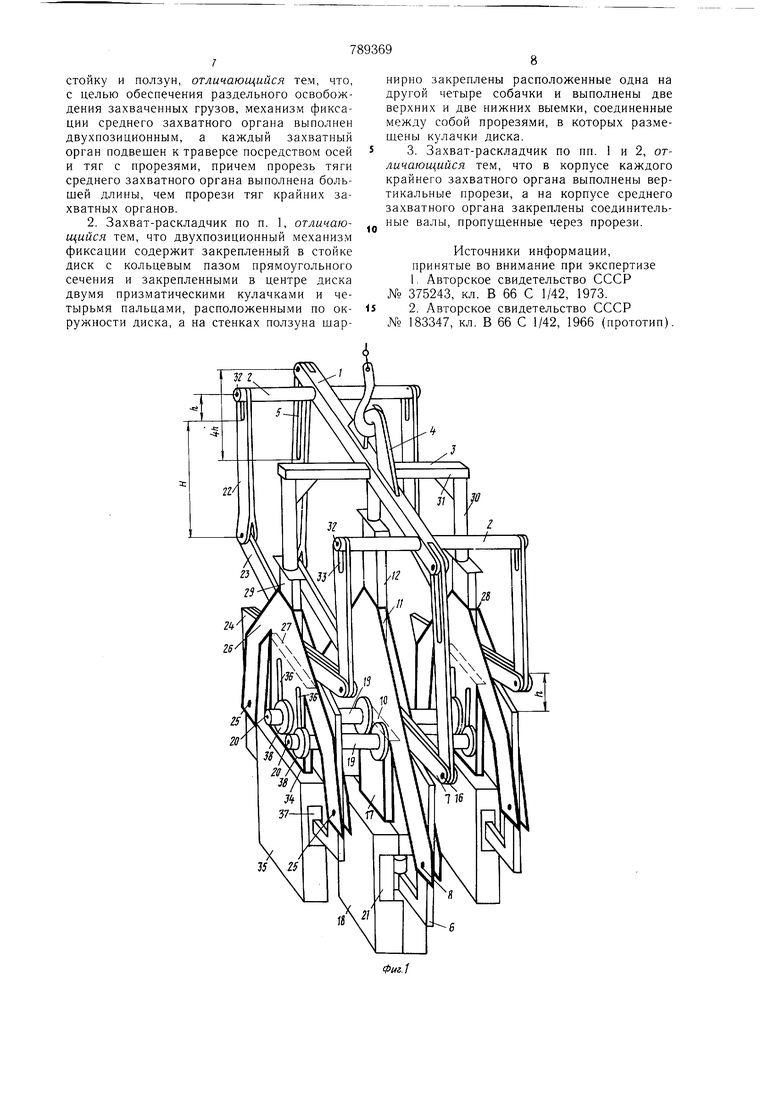
Изобретение относится к грузозахватным устройствам. Известно грузозахватное устройство, содержащее траверсу, шарнирно закрепленные на траверсе клещевые захватные органы и механизм фиксации их в раскрытом положении 1. Однаюэ это устройство может одновременно захватывать только один груз или один пакет грузов. Наиболее близким к предлагаемому изобретению является грузозахватное устройство, содержащее траверсу и подвешенные к ней крайние и средний захватные органы, каждый из которых содержит корпус с шарнирно закрепленными на нем клещевинами и снабжен механизмом фиксации клещевины в раскрытом положении, включающим в себя стойку и ползун 2. Недостатком этого устройства является то, что оно не может обеспечить раздельное освобождение захваченных грузов, что иногда требуется по условиям работы. Цель изобретения - обеспечение раздельного освобождения захваченных грузов. Поставленная цель достигается тем, что механизм фиксации среднего захватного органа выполнен двухпозиционным, а каждый захватный орган подвешен к траверсе посредством осей и тяг с прорезями, причем прорезь тяги среднего захватного органа выполнена большей длины, чем прорези тяг крайних захватных органов. При этом двухпозиционный механизм фиксации может содержать закрепленный в стойке диск с кольцевым пазом прямоугольного сечения и закрепленными в четыре диска двумя призматическими кулачками и четырьмя пальцами, расположенными по окружности диска, а на стенках ползуна щарнирно закреплены расположенные одна на другой четыре собачки и выполнены два верхних и две нижних выемки, соединенные между собой прорезями, в которых размещены кулачки диска. В корпусе каждого крайнего захватного органа могут быть выполнены вертикальные прорези, а на корпусе среднего захватного органа закреплены соединительные валы, пропущенные через прорези. На фиг. 1 изображен захват-раскладчик, общий вид; на фиг. 2 - средний захват, общий вид; на фиг. 3 - сечение А-А на фиг. 2.
Описываемый захват-раскладчик содержит грузовую траверсу, состоящую из основной балки 1, двух крайних поперечных консолей 2 и средней поперечной консоли 3, подвешиваемую к крюку подъемного механизма посредством серьги. К траверсе подвешены три захватных органа.
К основной балке 1 траверсы посредством тяг 5, захватных рычагов 6 и 7 и осей 8 поворота подвешен корпус 9 среднего захватного органа. Боковые поверхности корпуса жестко соединены между собой горизонтальной полкой 10, служаш.ей также опорой рычагов 6 и 7. На корпусе 9 жестко закреплена коробчатая стойка 11 механизма фиксации раскрытого положения рычагов 6 и 7, внутри которой расположен коробчатый ползун 12, который жестко соединен с балкой 1 траверсы посредством тяги 13.
На концах основной балки 1 установлены оси 14 крепления тяг 5. В верхних концах которых выполнены продольные прорези 15, а их нижние концы соединены с рычагами 6 и 7 осями 16. В нижней части корпуса имеется вертикальный упор 17 для взаимодействия с грузом 18.
На внешних сторонах упора 17 жестко закреплены втулки 19, через которые пропущены соединительные валы 20, соединяющие крайние захваты со средним. На нижних концах рычагов 6 и 7 шарнирно закреплены зажимы 21.
К поперечным консолям 2 траверсы с помощью подъемных тяг 22, захватных рычагов 23 и 24 на осях 25 подвешены корпусы 26 крайних захватов. Стенки корпусов жестко соединены между собой и горизонтальными полками 27.
Внутри каждой коробчатой стойки 28 однопозиционных механизмов фиксации крайних захватных органов закреплен Н-образный поворотный диск с пальцами и внешним кольцевым пазом, а на ползуне 29 шарнирно закреплена собачка. На боковых стенках этих ползунов выполнены выемки с примыкаюшими снизу центрально расположенными прорезями.
Устройство работает следующим образом.
В исходном положении захват-раскладчик устанавливают упорами 17 и упорами 34 на грузы 18 и 35, подлежащие перемещению. До соприкосновения с грузами захват-раскладчик поддерживается на весу тягой 13 среднего захватного органа и тягами 30 крайних захватных органов. Захватные рычаги 6, 7, 23 и 24 опущены под действием собственного веса и раскрыты. Горизонтально расположенные кулачки 41 поворотных дисков подперты горизонтальными срезами выемок 46 в ползуне 12 и выемок в ползунах 29.
При опускании захвата-раскладчика после соприкосновения всех упоров с грузами срабатывают механизмы фиксации всех захватных органов. При этом опускающиеся собачки в ползунах 29 и собачка 42 в ползуне 12 давят на пальцы 40, поворачивая диски 39 на 90° и приводя кулачки 41 в вертикальное положение, не препятствующее свободному подъему ползунов 12 и 29, а также подъему концов захватных рычагов 6,
7, 23 и 24.
При последующем подъеме захватараскладчика в первую очередь приподнимаются грузы 35, перемещаемые крайними захватными органами, так как к этому моменту заканчивается свободный ход подъемных тяг 22. Внутри корпусов 26 жестко закреплены коробчатые стойки 28 механизмов фиксации раскрытого положения захватных рычагов 23 и 24, внутри которых расположены коробчатые ползуны 29, жестко соединенные с поперечными консолями 3
тягами 30 и косынками 31. На концах поперечных консолей 2 закреплены оси 32, на которые посредством прорезей 33 надеты тяги 22. Нижние части корпусов 26 образуют упоры 34 для взаимодействия с грузами 35.
Р На каждом корпусе 26 выполнены по две вертикальные прорези 36, через которые пропущены и могут в них перемещаться по вертикали соединительные валы 20. На нижних концах рычагов 23 и 24 закреплены захватные органы 37. На соединительные
S валы 20 свободно насажены втулки 38.
Внутри стойки 11 двухпозиционного механизма фиксации установлен поворотный диск 39 с внещним центрально расположенным кольцевым пазом, на котором жестко закреплены четыре пальца 40, перекрывающих кольцевой паз. Заодно с диском 39 на его внешних сторонах выполнены призматические кулачки 41.
На одной из стенок коробчатого ползуна 12 шарнирно закреплены собачки 42, 43,
5 44 и 45, расположенные одна над другой с равными промежутками и в вертикальном створе с кольцевым пазом поворотного диска 39, взаимодействующие в процессе работы среднего захвата с пальцами 40.
0 На обеих боковых стенках ползуна 12 выполнено по две прямоугольных выемки - верхняя 46 и нижняя 47 с горизонтальными срезами внизу и центрально расположенные прорези 48, соединяющие между собой выемки 46 и 47.
Грузы 18, перемещаемые средним захватным органом, приподнимаются позднее, когда заканчивается свободный ход подъемных тяг 5.
Разность свободного хода тяг 5 и тяг 22
0 составляет 5. За h принято расстояние между смежными пальцами 40 дисков 39. На эту величину разности хода грузы 18 опускаются относительно грузов 35 при их перемещении.
В процессе этого подъема вертикально
5 расположенные кулачки 41 среднего и крайних захватных органов беспрепятственно скользят по вертикальной прорези 48 и поднимающихся ползунов 12 и 29. Собачки 42, 43, 44 и 45, проходя через внещние кольцевые пазы поворотных дисков 39 и входя в соприкосновение с пальцами 40, проворачиваются вокруг своих осей, не препятствуя свободному подъему ползунов 12 и 29 и не вызывая поворота дисков 39.
Для выгрузки штучных грузов 18, перемещаемых средним захватным органом, осуществляемой на первой позиции раскладки, эти грузы доводят до соприкосновения с опорной поверхностью места выгрузки, а затем грузовую траверсу опускают на расстояние 4h. После опускания траверсы грузы 35, находясь по-прежнему в подвешенном состоянии, не достигают опорной поверхности места выгрузки, но при опирании грузов 18 на опорную поверхность срабатывает двухпозиционный механизм фиксации среднего захвата. Ползун 12 этого механизма занимает среднее положение, при котором его собачка 45, давя на палец 40, опускает последний на один шаг хода и, тем самым, приводит кулачки 41 поворотаого диска 31, расположенные в нижнем выеме 47 ползуна 12, из горизонтального положения в вертикальное. Рычаги 6 и 7 под действием собственного веса раскрываются и освобождают от зацепления грузы 18.
После последующего подъема грузовой траверсы собачка 45 ползуна 12, поднимающаяся вверх, проскакивает через верхний палец поворотного диска 39, располагаясь непосредственно над ним, а горизонтально расположенные кулачки 41 поворотного диска 39 опираются на горизонтальные срезы нижних выемов 47 ползуна 12, передавая воздействие собственного веса среднего захватного органа, освобожденного от грузов 18, на тягу 13 и балку 1.
Захват-раскладчик по завершении этого подъема перемещается на вторую позицию раскладки для выгрузки штучных грузов 35.
В этом положении верхние концы подъемных тяг каждого захватного органа совмещены с горизонтальной плоскостью, проходящей через грузовую траверсу.
На второй позиции раскладки, после соприкосновения подвешенных штучных грузов 35 с опорной поверхностью и последующего опускания траверсы на 2h ползуны 29 крайних захватных органов занимают крайнее нижнее положение.
После последующего подъема траверсы горизонтально расположенные кулачки 41 поворотных дисков 39 опираются на горизонтальные срезы в выемках ползунов 29, и воздействие собственного веса крайних захватных органов с помощью тяг 30 передается на поперечные консоли 3 траверсы. Верхние концы подъемных тяг 22 снова совмещаются с осями 32 поперечных консолей 3, а захватные рычаги 23 и 24 фиксируются в раскрытом положении.
Захват-раскладчик оказываетсся полностью освобожденным от перемещенных им щтучных грузов 18 и 35. Однако при этом раскрытое положение захватных рычагов 6
и 7 по-прежнему зафиксировано на нижней позиции фиксации.
Для перевода механизма фиксации раскрытого положения захватных рычагов 6 и 7 с нижней позиции на верхнюю и приведения упора 17 среднего захватного органа в один уровень с упорами 34 крайних захватных органов средний захватный орган упором 17 подводится к препятствию или к одному из выгруженных щтучных грузов 35,
jj после соприкосновения с которым он опускается. По заверщении этого опускания ползун 12 занимает крайнее нижнее положение, собачки 45, 44, 43 и 42 последовательно воздействуют на пальцы 40 поворотного диска 39, поворачивая последний кажi дый раз на 90°. В результате последнего поворота кулачки 41 занимают горизонтальное положение. Рычаги 6 и 7 по-прежнему раскрыты.
Затем выполняется подъем траверсы,
0 и захватные рычаги 6 и 7 среднего захватного органа фиксируются на верхней позиции, т. е. в верхней выемке 46 ползуна 12. Захватные рычаги каждого захватного органа раскрыты.
Захват-раскладчик приведен в исходное
положение.
В случаях, когда грузы 35, отцепленные на второй позиции раскладки, необходимо расположить вплотную друг к другу, используется средний захватный орган. С этой
0 целью он упором 17 устанавливается на один из выгруженных штучных грузов 35 и затем опускается. В результате ползун 12 опускается, его собачка 45, надавливая на верхний палец 40, поворачивает диск 39 на 90°, а кулачки 41 занимают вертикальное полоа жение, не препятствующее холостому ходу (подъему) этого ползуна.
Затем траверсу поднимают и груз 35 подносят вплотную ко второму, рядом стоящему грузу. При этом собачка 45 ползуна 12 срабатывает вхолостую, не вызывая поворота поворотного диска 39. Ползун 12 занимает крайнее верхнее положение. Захватные рычаги 6 и 7 обжимают сближенный штучный груз 35, поддерживая его на весу. Подъемные тяги 5 занимают крайнее нижнее
положение.
После этого средний захват переводится в положение, исходное для начала или повторения цикла работы.
50
Формула изобретения
стойку и ползун, отличающийся тем, что, с целью обеспечения раздельного освобождения захваченных грузов, механизм фиксации среднего захватного органа выполнен двухпозиционным, а каждый захватный орган подвешен к траверсе посредством осей и тяг с прорезями, причем прорезь тяги среднего захватного органа выполнена большей длины, чем прорези тяг крайних захватных органов.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 375243, кл. В 66 С 1/42, 1973. 2. Авторское свидетельство СССР
№ 183347, кл. В 66 С 1/42, 1966 (прототип).
