СО
ОО
ел
4
00
(puel
I1
Иэобрегение OIHOCHTCH к автоматике и вычислитрлf nofi технике и может быть использовано для адресования подвесных и напольных транспортных средств.
Пе.пь изобретения - повышение точ-- ности адресования транспортных средств за счет исклю ения ошибок при адресовании от случайных кратковременных сбоев счетчика.
На фиг,1 приведена функциональная схема устройства , на фиг. 2 - времо.н- ные Диаграммы, поясняющие ei O
Устройство сол;п ит датчик 1 рядов, задатчик 2 адреса, формироиатейь 3 импульсов, енератор 4 ItмпyльcoEJ элементы ИЛИ Ь-8, 9; комму гаторы 10 и 11 э:1ементы 12 ч 13 сравнения, ц(фроаналоговый преобра: ова тель (ЦАП) К, блок 15 управления ис полкительньпчи механизмами, компараторы 1Ь-18, элементы НЕ-ИЛИ 19-22, ин- тагратор 23 и элемент И Z i,
Устройство работает следующим об- .ачомГ яадатчика 2 адреса номер пояи- ij4,f, 3 KOTOi ие. 1бходя ю напоапчт-,
ране nOf. THi ;; г р(:,К: . ; ЯНОСИТСЯ в
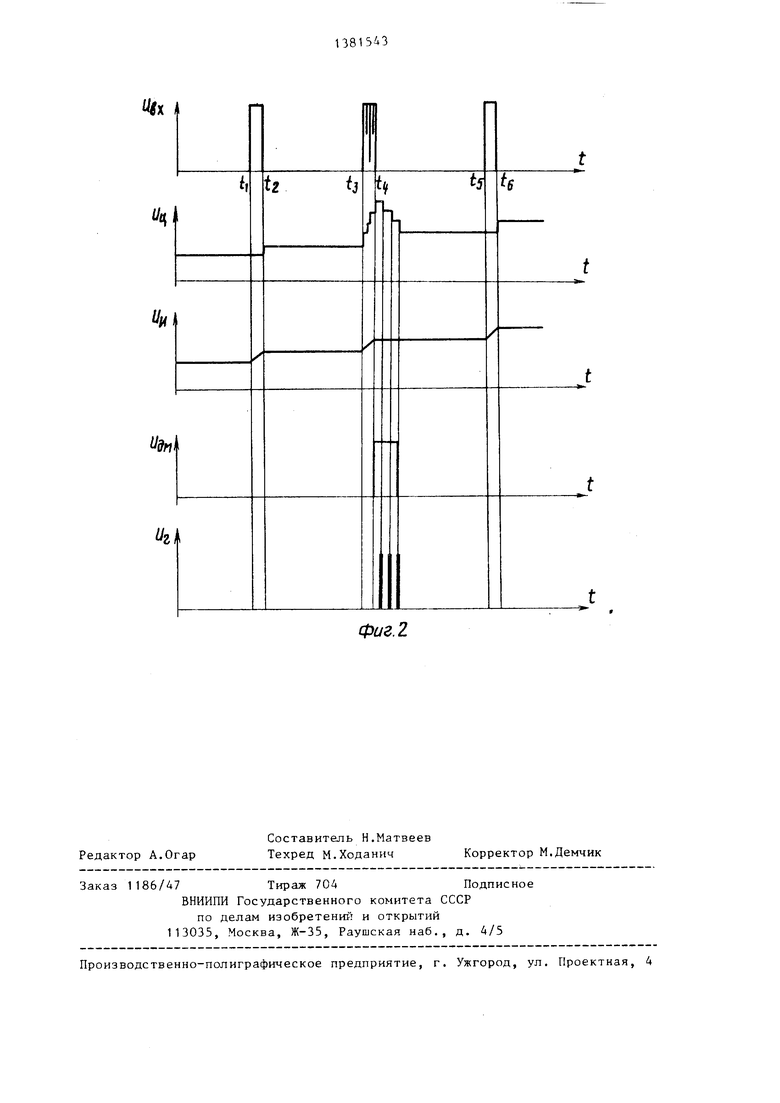
: чстчик 9 м сравнивается Р элемеятр 12 сравн.ен1и ; tк. ev-o l гшзицин яах:)/- пения г,-.анспо --гнсч о средства, ь рС - Si/ ibTaTF чего с вьгходоп Болыпе , И -иьшс ис. С vvifae i riii iiaji на b: i iiibi , ; ::р-1анд Вперег;, И;11ац блсча 1 . : . TbeTCTBtiHHo J r.ie вырабагыпаетс q si - манда 43 включение соответствующеft исполнитепьно 1- механизма, а на iiKcr uiK ПС г;ле7ч:н снт нал л; .: -мм1Г1--уюшн 1 или вычитающий в:сод. о т ;ядов пг;с -гупает на счетный йкод счегчика 9, п релульта чег-о (bv-iKCHpyei пройдемна . позиция. Двоичный код с выхода счетчика 9 преобразуется АП 4 в эквивалентное по оеличине ,иют 08 je ступенчатое нап- ря-жение Пц (фц|.). Величина ступеп- и соотретс перемещению траьк:-- портного сре,п,стйа на одну позицио ± If S где р - погрешность квантоьа- чия ЦА-П 14. Входной импульс U инте -ратора 2J фор1чируется по длнтельноГ1-И и амплитуде формирователем 3, ,- 17олярность е. о определяется направлением движения транспортного средства г.,мощью коммутаторов 10 и 11. При перемещении грапспорiного средства ма одну г о:1иц№;1 напряжение U на выходе интегр; Г :-;р 23 также возрастас-;
V Т
на одну ступеньку U ± + . -
где Е , Т, - а шдитуда и длительность входного импульса, Т - постоянная времени интегратора, f - погрешность Г11)и интегрировании. Если абсолютная ве.1 1гчина разности /(U +v ) - (U + )J ±
+ . ) I /i меньше порога срабаты
ваиия о компараторов 17 и 18, то состояние последних не изменяется. Величина порога срабатывания для этих компараторов одинакова, но взаимно противоположна по знаку. Условием ирс Бяльности функционирования устройства яв.пяется выражение t5l
1 у -О 2
J
-- IКимпаратор 16 срабатывает при лю-- t;o.L рассогласовании напряжений выхо- I oii LIAR 1 и и -1тегра гора 21 и ириво- аИ1 напряжение вьгчол.а интегратора 2j а время интегрирования к уровню 1сМ1рч-я;ения выхода ЦАП 14. -за счет че ) не происходит накопление ошибок г инте граторе.
При подходе транспортного сред- I , i.п к заданному адресу в элементе 3 сравнения происходит сравнение с Пу-двар1-тельноч уставкой,, в резуль- f-i-Jt чего с выхода BonbUie или Рав ю элемента 13 сравнения поступает .--HI нал на вход комангцл Переход на |-. скорость блока 15. При дости- е1;ии транспортным средством заданно i ацреса с выхода Равно элемент 12 с:равнения на соответствующий вход опека 15 поступает команда Стоп.
Е случае з;-: 1мси ложно информации счетчик 9 в результате воздействия ггэмех напряжение на выходе ЦАП 14 увеличивается (.уменьшается) скачком. Вследствие инерционности интет-ратора : 3 на входах компаратора 18 (17) по- пвияет ся дифференциальный сигнал /A J / и, - . Компаратор 8 (17) срабатывает, его выходной сигнал переключает вход счетчика 9 н пь;читание (сложение) и запускает ге- гератор 4, и 1пульсы с которого поступи., г на счет чьи вход счетчика 9 и умсаьшают (увеличивают) содержимое последнего до тех пор, пока на входа компаратора 18 (17) не установится ;1 ппри- ке ие в соопветствии с выраже- ,ь; М + jf i IS. Сработавшю компара- - м; переключается в исходное положаиие, отключая генератор 4 импульсов, режим компенсации заканчивается.
На элемент И 24 поступает запрещающий сигнал (логический ноль) от за- датчика 2 адреса при записи информации в счетчик 9 при его начальной установке, Элемен7ы НЕ-ЦПИ 19-22 исключают ложное срабатывание устройства в
му вхолу счетчиком 9, так как за счет инерционности интегратора 23 к входам компараторов 17 и 18 может быть приложен сигнал рассогласования, превышающий их порог срабатывания. Для обеспечения нормальной работы элементов 12 и 13 сравнения они тактируются передним фронтом импульса с выхода формирователя 3, а состояние счетчика изменяется по заднему фронту этого импульса. Допустимая погрешность интегратора определяется выра20
М - Г жением . -т-
25
компаратора, интегратор, четьфе элемента НЕ-1ШИ, четыре элемента И.Г1И, элемент 1, второй коммутатор и генератор импульсов, вьгкод которого соединен с первым входом первого элемента ИЛИ, выход которого соединен с первым входом счетчика, вычод которого соединен с информационным входом
момент приема информации по счетно- Q цифроаналоговогс преобразоватепя,
выход которого соединен с первыми входами компараторов, выход сигнала положительной полярности формирователя импульсов соединен с входами разрешения сравнения первого и второго элементов сравнения, с вторым вхо- первого элемента ИЛИ, с информационным входом первого коммутатора и с первьми входами первого и второго элементов НЕ-ИЛИ, выходы которых соединены с первыми входами третьего и четвертого элементов 1ШИ соответственно, выход которого соединен с первым входом элемента И, выход которого соединен со стробирующим вхо/юм генератора, выхол датчика рядов соединен с входом формирователя HMiiyjib- сов, выход сигншта обратной полярности которого соединен с информационным входом второго коммутатора, выходы первого и второг о коммутаторов соединены с информационным входом интегратора, выход которого соединен с вторыми входами с первого по третий компараторов, выходы которых соединены с входом останова интегратора и вторыми входами первого и второго элементов НЕ-ИЛИ соответственно, выходы третьего и четвертого элементов НЕ-ИЛИ соединены с вторыми входами второго и третьего элементов ИЛИ соответственно, выходы которьт : соединены с суммирующим и вычитающим входами счетчика соответственно, первый и второй выходы блока управления исполнительными механизмами соединены с вторыми выходами четвертого и третьего элементов НЕ-ИЛИ и управляющими входами первого и второго коммутаторов соответственно, выход сигнала запрета задатчика адреса соединен с вторым входом элемента И.
Формула изобретения
Устройство для автоматического адресования транспортных средств, содержащее датчик рядов, первый коммутатор, блок управления исполнительн1:Г ми механизмами, два элемента сравнения, счетчик и эадатчик адреса, информационный выход которого соединен с входом установки начального значения счетчика, выход которого соединен с первыми входами первого и второго элементов сравнения, выходы которых соединены с первым и вторьп входами команд блока управления исполнительными механизмами соответственно, входы первой и второй констант устройства соединены с вторыми
входами первого и второго элементов сравнения соответственно, отличающееся тем, что, с целью повышения точности адресования транспортных средств за счет исключения ошибок адресования при случайных кратковременных сбоях счетчика, в него введены формирователь импульсов, цифроаналоговьш преобразователь, три
30
3.5
40
45
50
20
25
30
3.5
40
45
50
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения времени установления выходного сигнала цифроаналоговых преобразователей и устройство для его осуществления | 1987 |
|
SU1494216A1 |
| Аналого-цифровой преобразователь интегральных характеристик напряжений | 1988 |
|
SU1615888A1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| Программируемый источник питания | 1988 |
|
SU1597875A1 |
| Устройство для цифровой записи-воспроизведения цифровой информации | 1990 |
|
SU1788521A1 |
| Программируемый аналого-цифровой преобразователь | 1987 |
|
SU1732469A1 |
| Устройство для контроля уровня подготовки операторов | 1987 |
|
SU1472937A2 |
| Устройство для контроля дефектов поверхности | 1987 |
|
SU1520354A1 |
| Устройство для дельта-демодуляции сигналов | 1984 |
|
SU1292186A1 |
| Устройство для автоматического адресования транспортных средств | 1983 |
|
SU1089586A1 |
Изобретение относится к антома- тике и вычислительной технике и может быть использовано для адресования подвесных и напольных транспортных средств. Цель изобретения - повышение точности адресования транспортных средств за счет исключения ошибок npi; адресовании от случайных кратковременных сбоев счетчика. С этой целью в устройство, содержащее счетчик 9, датчик 1 рядов, задатчик 2 адреса, блок 15 управления исполнительными механизмами, элементы 12, 13 сравнения и коммутатор 10, введены форг и- рователь 3 импульсов, ксзммутатор 11, цифроаналоговый преобразователь 14, компараторы 16-18, интегратор 23, элементы HE-i-ШИ 19-22, элементы IU1M 5-8, генератор 4 импульсов и элемент И 24. За счет различной реакции цифровых и аналоговых схем (счетчика 9 и интегратора 23) возникает разностный сигнал на входе компараторов 17, 18, которые переводят устройство в режим компенсации, тем самым исключая ошибку при адресовании, 2 ил. 
| Устройство для автоматического адресования грузов | 1972 |
|
SU476569A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для автоматического адресования транспортных средств | 1983 |
|
SU1089586A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
