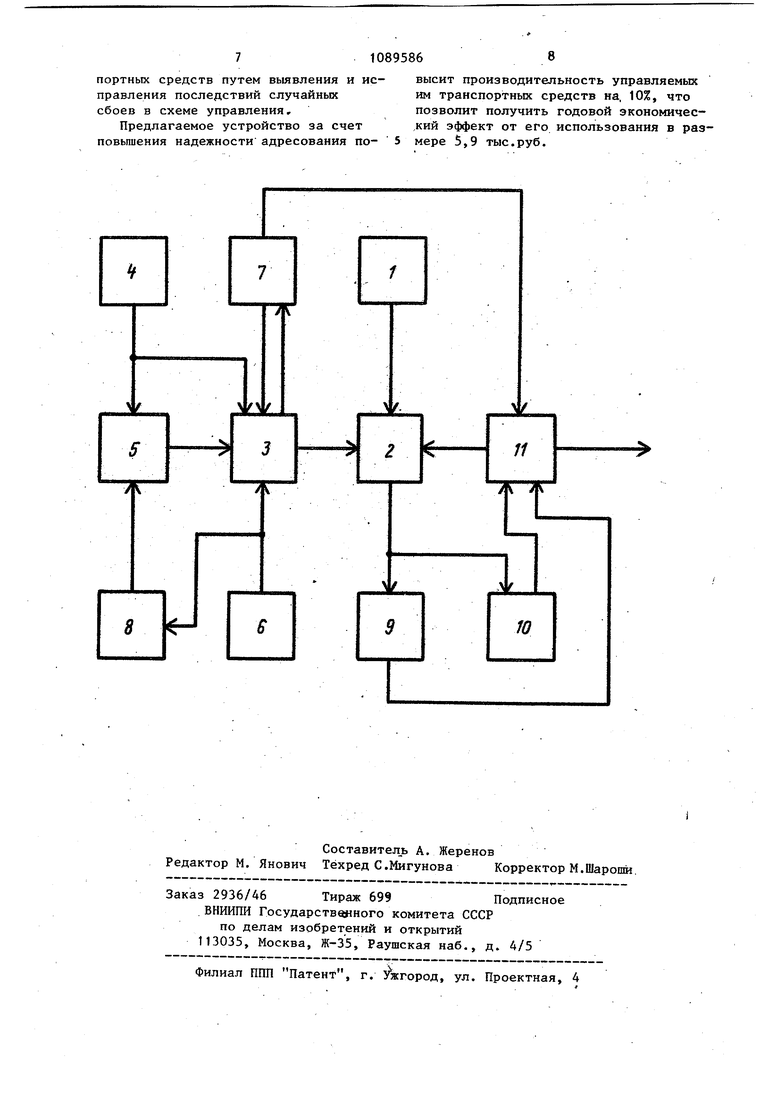
Изобретение относится к автоматике и вычислительной технике и может быть использовано, например, на скла дах стеллажного типа, оснащенных кранами-штабелерами, на монорельсовых дорогах и т.д. Известно устройство для адресования транспортных средств, работающее по позиционному принципу, в кото ром кчэд адреса на каждой адресной позиции формируется с помощью набора датчиков, количество которых зависит от числа адресных позиций содержа- щее блок зторавления исполнительньми механизмами, логический блок, блок адресования, блок прохождения адресной позиции, формирователь кода и блок номера адресной позиции. Устройство .работает следующим образом. С помощью блока адресовани оператор задает адрес, на который необходимо направить транспортное средство. Этот адрес сравнивается с адресом нахождения транспортного средства, который считывается с адресных датчиков блока прохождения адресной позиции в блок номера адресной позиции. По результатам срав нения в логическом блоке выраб атыва ся команда направления движения транспортного средства, которая поступает в блок управления исполнител ными механизмами. По мере движения . транспортного средства на каждой адресной позиции с адресных датчиков считывается адресная комбинация сигналов, присвоенная только данному адресу. Остановка транспортного средства производится при совпадении адреса нахождения транспортного средства с заданным адресом. Устройство обеспечивает автоматическое адресование транспортного средства Недостатком устройства является быстрое снижение его надежности при увеличении числа адресов, обслужива мых транспортным средством, что свя зано с увеличением количества адрес ных датчиков и ростом аппаратурных затрат в схеме устройства. Отказ любого адресного датчика приводит к искажению считьгааемого адреса нахождения транспортного средства и к неправильному адресованию транспо ного средства. При большом количестве адресов более высокой надежностью обладают устройства адресования, работающие по счетно-импульсному принципу, в которых группу адресных датчиков заменяет датчик обратной связи. Наиболее близким по технической сущности к предлагаемому является устройство для автоматического адресования грузов, содержащее задатчик адреса, блок памяти, дешифратор, датчик счета рядов, реверсивный счетчик, блок управления двигателями, блок сравнения, причем выходы реверсивного счетчика и задатчика адреса подключены к соответствующим входам сумматора, выходом связанного со схемой управления двигателями. Устройство работает следующим образом. Оператор на задатчике адреса выставляет адрес, по которому должен переместиться механизм.В зависимости от соотношения координат механизма, записанных в счетчике адреса (место нахождения механизма), и новых координат, выставле-нных на задатчике адреса, на выходе блока сравнения цоявляется сигнал Вперед или Назад. Через блок управления включаются соответствующие двигатели, а также подается на счетчик разрешение сложения или вычитания в зависимости от того, нарастать или убывать будет номер ряда при движении механизма. Каждый импульс от датчика счета рядов увеличивает или уменьшает число, ааписаиное в счетчике. При подходе механизма к заданному адресу на определенное количество рядов, необходимое для гашения маршевой скорости, cy a4aтop вьвдает в блок управления двигателями команду перехода на майую скорость. Команда Стоп формируется блоком сравнения, как только адрес счетчика совпадает с адресом задатчика С22.I. Надежность зтого устройства не , меняется с увеличением числа обслуживаемых адресов, но оно характеризуется низкой Помехозащищенностью, так как поступление от датчика счета рядов лишнего импульса или отсутствие импульса на адресной позиции приводит к ис ажению информации в счетчике и, следовательно, к ошибкам в а|(ресовании, что снижает надежность устройства. Цель изобретения - повьппение надежности устройства. Поставленная цель достигается тем, что в .устройство, содержащее , . датчик числа рядов, задатчик адреса, блок сравнения, сумматор и реверсивньтй счетчик, первыйинформационн вход которого подключен к выходу эадатчика адреса, управляющий вход является управляющим входом устройс ва, выход реверсивного счетчика сое динен с входами блока сравнения и сумматора, выходы которых являются соответственно первым и вторым выходами устройства, введейй датчик четной позиции, триггер, элемент ко мутации, счетчик ошибок и группа элементов И, входы которых соединен соответственно с выходами датчика четной позиции, триггера, датчика числа рядов и с первым выходом счет чика , второй выход которого является третьим выходом устройства выходы элементов И группы соединены соответственно с вторым информацион ным входом реверсивного счетчика и с входом счетчика ошибок, первый и второй вх)Ьды триггера соединены соответственно с выходами датчика числа рядов и элемента коммутации, вход которого подключен к выходу да чика четной Поаиции. На чертеже нриведена схема устро ства. Предлагаемое устройство содержит задатчик t адреса, реверсивный счет чик 2, группу 3 элементов И, датчик 4 числа рядов, триггер 5, датчик 6 четной позиции, счетчик 7 ошибок, элемент 8 коммутации, блок 9 сравнения , сумматор 10, блок 11 управления исполнительными механизмами. Устройство работает след тощим образом.Оператор на задатчике 1 набирает номер позиции, на которую необходиМО направить транспортное средство. Этот номер заносится в реверсивньй . счетчик 2 и сравнивается в блоке 9 сравнения с номером позиции нахожде ния транспортного средства. В результате на выходе блока 9 сравнени появляется сигнал Вперед или Назад, который поступает в блок 11 управления исполнительными механизмами, где вьфабатьшается команда на включение соответствующего двигателя исполнительных механизмов, а на счетчик 2 подается разрешение сложе ния или вычитания. При движении транспортного средства на каасдой адресной позиции на входах группы 3 элементов И возникает комбинация сигналов от датчика 4, триггера 5 64 и датчика 6, который срабатывает на каждой позиции с четным номером. От датчика 4 сигнал поступает также на вход триггера 5, который меняет состояние с нулевого свое состояние с нулевого на единичное при поступлении каждого второго, четвертого, шестого и т.д. сигнала от датчика 4. Если у датчиков 4 и 6 нет сбоя в работе, сигналы от триггера 5 и датчика 6 на адресной позиции окажутся одинаковыми: единичными или нулевыми. Тогда как через группу 3 элементов И сигнал от датчика 4 поступает на счетный вход реверсивного счетчика 2 и пройденная позиция будет сосчитана-прибавлена или вычтена из числа, записанного в счетчике 2, в зависимости от направления движения транспортного средства. Если же на адресной позиции сигналы от триггера 5 и датчика 6 окажутся разными, то это означает, 1то в работе датчиков произошел сбой. Тогда . запишется единица в счетчик 7 ошибок и в зависимости от комбинации п сигналов на своих входах группа 3 элементов И либо пропустит сигнал от датчика 4 на вход реверсивного счетчика 2, либо задержит его. Рассмотрим эту ситуацию на конкретных примерах. Пусть на адресной позиции на входах группы 3 элементов И появилась следующая комбинация сигналов: от датчика 4 1, от датчика 6 1, от Триггера 5 О. Это может означать либо то, что от датчика 6 поступил лишний импульс либо то, что на предьздущей позиции импульс от датчика 4 не поступил. Поэтому группа 3 элементов И пропустит сигнал от датчика 4 на вход реверсивного счетчика 2, и позиция будет сосчитана, 4 дновременно в счетчик 7 ошибок будет записана единица, означающая, что обнаружен один сбой в работе датчиков 4 и 6. На следующей адресной позиции в зависимости от характера обнаруженного сбоя возможны две ситуации. Если сбой произошел из-за лишнего импульса от датчика 6, то на входах группы 3 элементов И появится комбинация из трех единиц от датчикбв 4 и 6 и триггера 5, означающая, что сбоя нет. Сигнал оТ датчика 4 поступит на вход реверсивного счетчика 2 и направит сигнал сброса на вход счетчика 7 ошибок. Если же сбой произошел из-за пропадания импульса от датчика 4, то на входах группы 3 элементов И появляется от датчика 4 1, от датчи ка 6 О, от триггера 5 1. Тогда сигнал от датчика 4 поступит на вход реверсивного счетчика 2 и запишет еще одну единицу в счетчик 7 ошибок. С выхода счетчика 7 на вход группы элементов И поступит сигнал Двойки Сочетание этого сигнала с сигналами на других входах группы элементов И вызовет появление на выходе, связанном с реверсивным счетчиком 2, дополнительного импульса, компенсирующего пропавший ранее сигнал от датчика 4. Таким образом, обнаруженная ошибка будет исправлена в реверсивном счетчике 2. Одновременно подается сигнал на открытие элемента 8 коммутации и триггер 5 переводится в состояние О, соответствующее состоянию датчика 6. Если обнаруженная ошибка была случайной, на следующей адресной позиции на входах группы 3 элементов И появится комбинация- из трех единиц означающая, что сбоя нет, сигнал от датчика 4 попадает на вход реверсивного счетчика 2, а сигнал сброса ,от группы элементов И 3 - на вход счетчика 7, возвращая его в исходное состояние. Рассмотрим другую ситуацию, когда после нескольких позиций, пройденных без сбоев, на входы группы элементов И 3 поступила комбинация сигналов 1 от датчика 4, О от датчика 6 и 1 от триггера 5. Такая комбинация может возникнуть если на адресной позиции пропал сигнал от датчика 6 Или если с датчика 4 ; поступил случайный сигнал. Последнее более опасно, так как искажает резуль тат в реверсивном счетчике 2. Поэтом получив такую комбинацию группа 3 элементов И не пропускает сигнал от датчика 4 на вход реверсивного счетч ка 2. Одновременно триггер по устайо вочному входу переводится в состояни О, а в счетчик 7 ошибок заносится 1. Теперь, если причина сбоя деист вительно бьша в появлении случайного импульса от датчика 4, на ближайшей адресной позиции на входах группы 3 элементов И появится комбинация из трех единиц, свидетельствующая об отсутствии сбоя,и сигнал от датчика 4 пройдет на вход реверсивного счетчика 2,а счетчик 7 ошибок вернется в исходное состояние. Если же причина сбоя была в пропадании сигнала от датчика 6, то на следующей адресной позиции опять появится комбинация сигналов 1, О, 1, в счетчик 7 ошибок заносится еще одна 1, Двойка с выхода счетчика 7 поступает на входы группы 3 элементов И, что. в сочетании с остальными входными сигналами дает комбинацию, по которой, как было описано вьппе, пропускается на вход реверсивного счетчика 2 сигнал от датчика 4 и дополнительный импульс, компенсирующий сигнал от датчика 4, задержанный на предыдущей позиции. В реверсивном счетчике 2 окажется число, соответствующее номеру позиции, которую проходит транспортное средство, и таким образом ошибка будет исправлена. AнJaлoгичнo устройство выявляет и исправляет ошибки, связанные с отсутствием сигнала от датчика 4 на предполагаемой адресной позиции (комбинация рходных сигналов О, 1, 1, или О, 1, О). Если выявляемые ошибки носят не случайный характер, а повторяются на каждой следующей позиции при перемещении транспортного средства, то на каждой позиции увеличивается число в счетчике 7. Когда это число станет равным любому наперед заданному от 3-х и более, на выходе счечтика 7 появится сигнал аварийной остановки, который поступает в блок 11 управления исполнительными механизмами, и транспортное средство останавливается из-за постоянных сбоев в схеме управления. Если же сбои отсутствуют или носят случайный характер, то транспортное средство продолжает движение в заданном направлении. При подходе к заданному адресу йа определенное количество рядов сумматор 10 вьщает команду перехода на малую скорость. При достижении заданного адреса блок сравнения формирует команду Стоп, котор поступает в блок 11 , управления исполнительными механизмами, и транспортное средство останавливается. Для переадресования транспортного средства необходимо на задатчике 1 адреса набрать номер новой позиции. Использование изобретения позволит повысить надежность работы устройств для автоматического адресования транспортных средств путем выявления и исправления последствий случайных сбоев в схеме управления. Предлагаемое устройство за счет повышения надежности адресования по- 5 высит производительность управляемых им транспортных средств на, 10%, что позволит получить годовой экономический эффект от его использования в размере 5,9 тыс.руб.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для автоматического адресования транспортных средств | 1987 |
|
SU1432560A1 |
| Устройство для автоматического адресования транспортного средства | 1980 |
|
SU954336A1 |
| Устройство для адресования транспортного средства | 1978 |
|
SU746563A1 |
| Устройство для автоматического адресования транспортных средств | 1982 |
|
SU1027737A1 |
| Устройство для адресования транспортных средств | 1987 |
|
SU1418761A1 |
| Устройство для автоматического адресования транспортных средств | 1986 |
|
SU1381543A1 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ, содержащее датчик числа рядов, задат.чик адреса, блок сравнения, сумматор и реверсивный счетчик первый информационный вход которого подключен к выходу задатчика адреса, управляющий вход является управляющим входом устройства, выход реверсивного счетчика соединен с входами блока сравнения и сумматора, выходы которых являются соответственно первым и вторым выходами Устройства, отличающеес я тем, что, с целью повышения надежности, в неговведены датчик четной позиции, .триггер, элемент коммутации, счетчик ошибок и группа элементов И, входы которых соединены соответственно с выходами датчика четной позиции, триггера, датчика числа рядов и с первым выходом счетчика опгабок, второй выход которого является третьим устройства, выходы элементов И группы соединены соответственно с вто-Р рым информационным входом реверсив(Л ного счетчика и с входом счетчика ошибок, первый и второй входы триггера соединены соответственно с выходами датчика числа рядов- и элемента ком- Q мутации, вход которого подключен к выходу датчика четной позиции.
(f.
У
L.
Ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДШ УПР^СРБЩСтеАМИТРАНСПОРТНЫМИ | 1971 |
|
SU433493A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического адресования грузов | 1972 |
|
SU476569A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
