31458880«
сдвига фазы на 90, усилители 5-7,гают на активную 1д( совпадающую по фазовращатель 8, сумматоры 9-12,фазе с текущим напряжением U ста- управляемые усилители 13-15, умножи-тора) и реактивную Iр составляющие тель 16, блок 17 нелинейности типа с(Фиг. 2), изменяют (увеличивают) ре- экспоненты, блок 18 сравнения фаз,активную составляющую 1-, суммиру- блоки 19-22 сравнения, элементы 23-ют векторы ортогональных составляю- 25 выборки и хранения сигнала, фазо-щих 1 и 1р , получая вектор полночувствительные вьтрямители 26-28,го тока 1 , величину которого l выпрямители 29-33, фильтры 34-41 ниж- 10сравнивают с величиной допустимого них частот, блок 42 задания допусти-тока статора. При уравнивании этих мого статора, блок 43 задания поло-величин I 1 прекращается изме- винной величины допустимого тока ста-нение реактивной составляющей 1р, тора, блок 44 задания допустимоговеличина которой при этом оказываетг ток а ротора, блок 45 задания тока 15ся равной допустимой величине Ip . холостого хода ротора, компараторы Моделирование допустимого реактив- 46 и 47, блок 48 синхронизации и клю-ного тока по условию допустимого чи 49-56.тока ротора 1 основание на испольУстройство работает следующим об-зовании моделируемого полного тока
разом.20статора I и характеристики холостоМоделируется допустимая реактивнаяго хода машины, т.е. зависимости насоставляющая тока машины по условиюпряжения статорной обмотки на холодопустимого тока статора и условиюстом ходу от тока ротора I, или внутг
допустимого тока ротора дЛя непрерьш-ренней ЭДС Е; от тока намагничива - ного изменяющегося режима работы по 25 машины, 1 , приведенной к цепи роактивной составлякицей тока и напря-тора. Первое позволяет при измеренжению статорной обмотки. Меньшая изном текущем напряжении U статора и
получаемых реактивньк составляющихзаданньк параметрах машины;активного
принимается за величину располагае-сопротивления Гд и индуктивного соп- мого реактивного тока 1.Умножением 30 ротивления рассеяния Х статорной обпоследней на величину текущего напря-мотки, сопротивлений взаимоиндукции в
женил получают располагаемую реактив-продольной Хц и поперечной Хд, осях
ную мощность Q . U Ip..получить внутреннюю ЭДС
Моделирование допустимого реактив- . . , ( ного тока IP по условию допустимого 35 Е; и + (гд +
тока статора 1 осуществляется впромежуточную ЭДС в поперечной оси,
последовательности: фактический (те-т.е. ЭДС за реактансом в поперечной
кущий). полный ток статора I разла-оси
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1987 |
|
SU1534477A1 |
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381649A1 |
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381648A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Электропривод | 1991 |
|
SU1837379A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
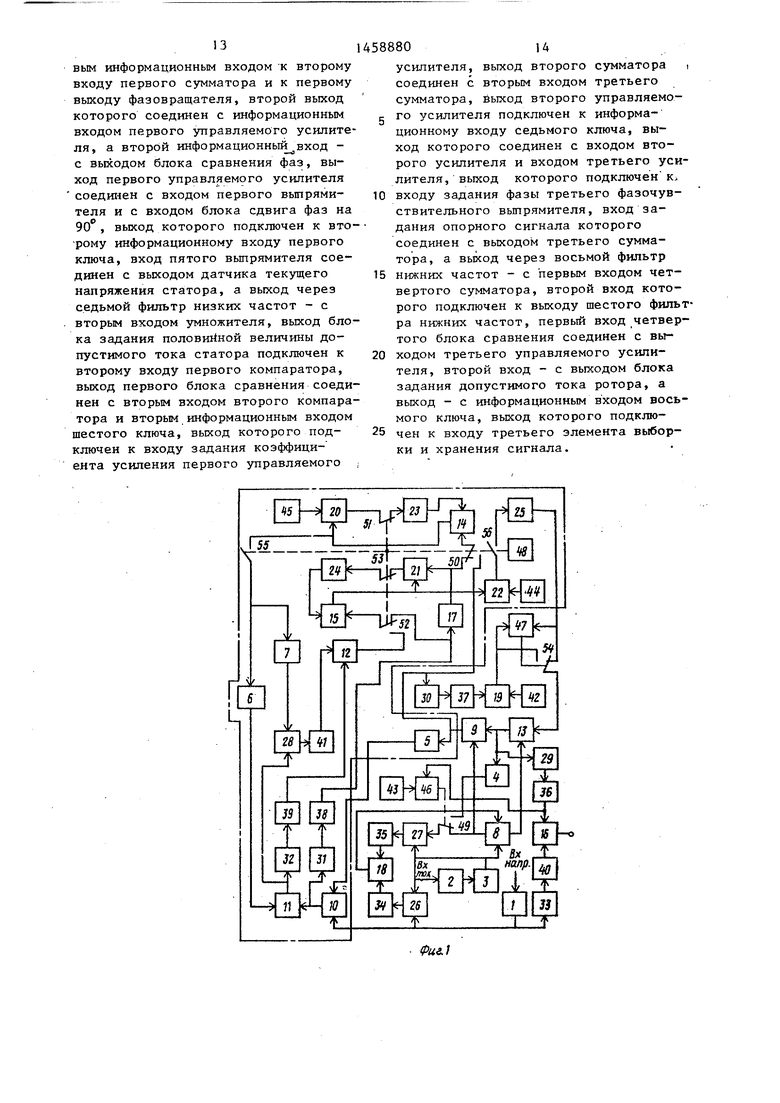

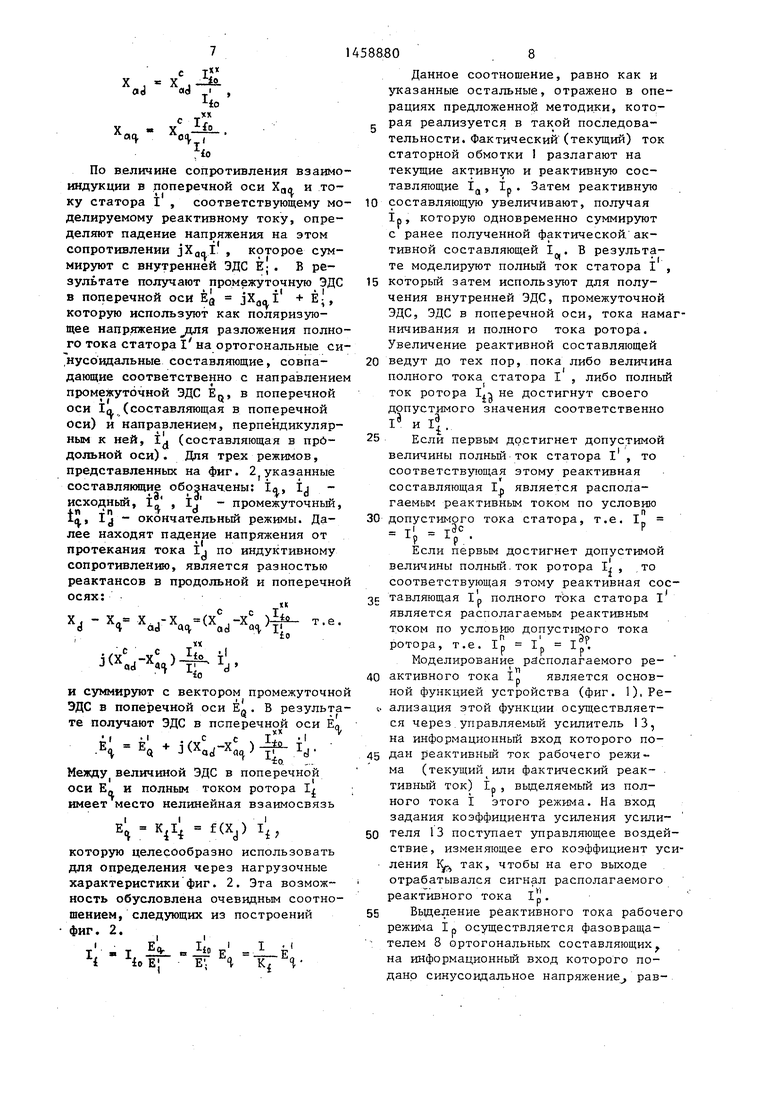
Изобретение относится к области аналоговой вычислительной техники, а именно к управлению режимами работы энергосистем, и может быть использовано для непрерывного контроля располагаемой реактивной мощности явнопо- люсных синхронных генераторов и двигателей, включая мощные и сверхмощные гидрогенераторы. Целью изобретения яв1 Изобретение относится к области аналоговой вычислительной техники, а именно к управлению режимами работы энергосистем, и может быть использовано для непрерывного контроля располагаемой реактивной мощности явно- полюсных синхронньк генераторов и двигателей, включая мощные и сверхмощные гидрогенераторы. Целью изобретения является повышение точности работы устройства. ляется повьшение точности работы устройства. Устройство содержит датчик текущего напряжения статора,.датчик текущего тока ротора, преобразователь тока в напряжение, блок сдвига фазы на 90 , усилители, фазовращатель, сумматоры, управляемые усилители, умножитель, блок нелинейности типа экспоненты, блок сравнения фаз, блоки сравнения, выпрямители, фильтры нижних частот, блок задания допустимого тока статора, блок задания половинной величины допустимого тока статора, блок задания допустимого тока ротора, компараторы, блок синхронизации и ключи. Достижение поставленной цели обеспечено благодаря введению в устройство третьего фазочувствительного вьшрямителя, третьего усилителя, блоков задания допустимого тока ротора и половинной величины допустимого тока статора, а также новым связям этих блоков между собой и .с другими блоками устройства. 2 ил. (Л Р сл 00 00 00 На фиг. представлена блок-схема устройства , на фиг. 2 - векторные диаграммы формирования внутренней ЭДС, ЭДС в поперечной оси, характеристика холостого хода (XXX) и исполь- .зование их для определения тока ротора. Устройство содержит датчик 1 текущего напряжения статора, датчик 2 текущего тока статора, преобразова- , тель 3 тока в напряжение, блок 4
+j(X -.X ) i % JX i .
-I Ч
ЭДС в поперечной ос и, т.е. ЭДС за ре- . актансом в продольной оси
Ё; h x,+x)i -. j(x,-x,)i;j Ё; jx,i4 j(,)i; Е, j(x,-x,)i;,
где ij - ортогональная составляющаясамым учесть изменение параметров
полного тока статора I в про-взаимоиндукции Х,, X .вследствие
дольной оси.нелинейности XXX, т.е. насьщения маг Второе позволяет по величине внут-«итной системы, а также благодаря
реннрй ЭДС Е. с помощью XXX найти взаимосвязям ток намагничивания машины, приведен- } f
,ной к цепи ротора 1 , который опре-где l - ток ротора, соответствую- деляет намагниченность магнитной сие-щий току намагничивания
темы машины в данном режиме, и темl .
io
К - коэффициент, учитьгоающий
нелинейность XXX,
определить ток ротора 1 в последо- вательности;по Е и l вычисляется К Е| /1 , а по величине Е и К, находится 1 .
Полученный ток ротора l сравнивают с величиной допустимого тока -ротора 1. При уравнивании этих величин l , 1|
должно быть прекращено изменение реактивной составляющей 1р, величина которой при этом оказывается равной допустимой величине 1°Р
1 с пользование указанной методики позволяет при моделировании допустим . го реактивного тока по условию допусти- 1 мого тока ротора добиться полного учет влияния нелинейности XXX, а именно не только за счет изменения текущего напряжения обмотки статора (как в прототипе) но также за счет распределения текущего активного и моделируемого реактивного тока,которое яв- ляется существенньЕм для мощных агрегатов в связи с форсированным использованием активных материалов машины. Это возможно благодаря тому, что никаких ограничений на моделируемый полный ток статора не накладывается ни по фазе, ни по величине, пока не
будет достигнута величина допустимого тока I . В результате повыща- ется точность вьмисления располагаемого реактивного тока и располагаемой реактивной мощности.
На фиг. 2 даны векторные диаграмм формирования внутренней ЭДС Е-, промежуточной ЭДС в поперечной оси Е и ЭДС в поперечной оси Е, характеристика холостого хода XXX, использование ее для определения тока намаг- X
ничивания Ij. по внутренней ЭДС, построение нагрузочньк характеристик (прямые, проходящие через начало координат на графике XXX), применение последних для нахождения тока ротора 1 по ЭДС Е . Диаграммы и характеристики даны при одном и том же фазном напряжении для трех моментов процесса моделирования располагаемого реактивного тока 1р : исходного рабочего режима, электрические величины которого имеют указанные обозначения, а нагрузочная характеристика не обозначена, промежуточного режима, соответствующего допустимой величине тока статора I , однако не
соответствующего располагаемому реактивному току по условию тока ротора и поэтому имеющего в обозкачеj3p Р
0
5
0 5
ниях электрических величин дополнительный индекс включая нагрузочную характеристику, а графические построения, выполненные штриховыми линиями, окончательного режима, соответствующего располагаемому реактивному току l, который в показанном на фиг. 2 пр имере оказался определенньм по условию допустимого тока ротора I., поэтому в обозначениях электрических величин и нагру- зочной характеристики использованы индексы Зр и п , что означает соответственно допустимый по условию тока ротора и соответствующий располагаемому реактивному току. Линиями со стрелками обозначены век- торно-синусоидальные величины диаграмм. Также стрелки указывают направление и последовательность графических построений для определения тока намагничивания и полного тока ротора.
- 20 25
30
X
По величине внутренней ЭДС и XXX находят ток намагничивания (см. построения на фиг. 2). Точки. (Ifo, Е)),
1о ;- характеризуют соответственно состояние магнитной системы исходного рабочего, промежу- 2g точного и окончательного моделируемых режимов машины. Через них проходят соответствующие нагрузочные характеристики: без обозначения, 3{ иЭр . Их наклон определяет степень 40 насыщения магнитопровода и, следовательно, изменения индуктивных сопро- тивленрш взаимоиндукции в продольной
Xij и поперечной X
0
od d itv,-J j j V-T.11V/J-1 - л л , осях, - где Xj и Х - синхрон45 ные реактансы в продольной и попе- речно.й осях машины. Чем меньше наклон, тем меньше эти сопротивления. Величины их с учетом насьщения целесообразно определить через сопротивления взаимоиндукции и , соот- ветствутощие некоторому базовому режиму, характеризуемому нагрузочной характеристикой, проходящей через точку XXX (1 ТЦ , Е; и), оп5 ределяемую током намагничивания на
X X
холостом ходу машины 1. и внутренней ЭДС, равной номинальному напряжению и . Согласно фиг. 2 это можно вьпюлнить по фopмvлaм
J
с If X«J, I
I to
XX
to
io
По величине сопротивления взаимоиндукции в поперечной оси Хдо и току статора I , соответствующему моделируемому реактивному току, определяют падение напряжения на этом сопротивлении jXgal , которое суммируют с внутренней ЭДС Ё. В результате получают промежуточную ЭДС в поперечной оси Eg JXoni + Ё-, которую используют как поляризующее напряжение дпя разложения полного тока статора I на ортогональные си- .нусоидальные составляющие, совпадающие соответственно с направлением промежуточной ЭДС Е, в поперечной оси Irt (составляющая в поперечной оси) и направлением, перпендикулярным к ней, 1 (составляющая в прб- дольной оси). Для трех режимов, представленных на фиг. 2 указанные составлякицие обозначены: to, ij исходный.
f т Н J
jL-o , х, - промежуточный, окончательный режимы. Далее находят падение напряжения от протекания тока Ii по индуктивному сопротивлению, является разностью реактансов в продольной и поперечной осях:
X
j(xt.-x:)
oJ
и суммируют с вектором промежуточной ЭДС в попе речной оси Ё . В результате получают ЭДС в поперечной оси Ел
- .
Е,
J (XaJ-Xa)
li
io.
JМежду величиной ЭДС в поперечной оси Е„ и полным током ротора 1 имеет место нелинейная взаимосвязь
EL КД f(X,) l
f(X,)
О
О которую целесообразно использовать для определения через нагрузочные характеристики фиг. 2. Эта возможность обусловлена очевидным соотношением , следующих из построений фиг. 2.
Ь Е
Ifo р ЁГ l
К,
Данное соотношение, равно как и указанные остальные, отражено в операциях предложенной методики, кото- рая реализуется в таксой последовательности. Фактический (текущий) ток статорной обмотки 1 разлагают на текущие активную и реактивную составляющие 1, IP. Затем реактивную составляющую увеличивают, получая 1р, которую одновременно суммируют с ранее полученной фактической активной составляющей 1. В результач (
те моделирзтот полный ток статора I , который затем используют для получения внутренней ЭДС, промежуточной ЭДС, ЭДС в поперечной оси, тока намагничивания и полного тока ротора. Увеличение реактивной составляющей ведут до тех пор, пока либо величина полного тока статора I , либо полный ток ротора I.j не достигнут своего допустимого значения соответственно 1 и l|.
Если первым достигнет допустимой величины полный ток статора l , то соответствующая этому реактивная составляющая IQ является располагаемым реактивным током по условию
допустимого тока статора, т.е. 1.
т - тЭс°
- ip - 1р .
Если первым достигнет допустимой величины полный.ток ротора 1, , то
соответствующая этому реактивная сосI .)
тавляющая „ полного тока статора I
является располагаемым реактивным током по условию допустимого тока ротора, т.е. 1р I p Ip .
Моделирование располагаемого реактивного тока 1. является основной функцией устройства (фиг. 1), Ре- ализация этой функции осуществляется через.управляемый усилитель 13, на информационный вход которого поДИН реактивный ток рабочего режима (текущий или фактический реак- . тивньш ток) IP, вьщеляемый из полного тока I этого режима. На вход задания коэффициента усиления усилителя 13 поступает управляющее воздействие, изменяющее его коэффициент уси- ления 1,, так, чтобы на его выходе отрабатывался сигнал располагаемого реактивного тока .
Выделение реактивного тока рабочего режима IP осуществляется фазовращателем В ортогональных составляющих на информациинньм вход которого подано синусоидальное напряжение, равное полному току статорной обмотки I, которое формируется на выходе преобразователя 3 из выходного тока датчика 2 текущего тока, поступающего на вход преобразователя З..На выходах фазовращателя 8 формируются ортогональные составляющие сигнала I , которые, однако, не являются актив«
ной и реактивной составляющей тока I. Такими они становятся благодаря функционированию контура регулирования на основе блока 18 сравнения фаз, воз
Предусмотренные в устройстве блок 4 сдвига фаз на 90°, компаратор 46, управляющий ключом 49, и блок 43 задания половинной величины допустимого тока статора выполняют вспомогательную функцию, а именно когда активная составляющая тока I незна-
действующего на вход задания амплитуд ортогональных составляющих фазо- 15 чительна. Псевдоактивная составляю- вращателя 8 так, что ортогональные щая, поступающая через ключ 49 на вход составляющие перераспределяются, стремясь к активной и реактивной составфазочувствительного выпрямителя 27, вследствие регулирующего воздействия на преобразователь 8 также становитляющим. Чтобы достигнуть этого, на
фазочувствительного выпрямителя 27, вследствие регулирующего воздействия на преобразователь 8 также становитвходы блока 18 сравнения поданы сиг- 20 ся незначительной, что обусловливает
некачественную поляризацию фазочувствительного выпрямителя 27. Чтобь) этот- недостаток устранить компаратор 46 закрывает (размыкает) канал первого информационного входа ключа 49 и от- крьгеает (замыкает)канал второго информационного входа этого ключа. В результате на вход фазочувствительноналы постоянного тока через фильтры 34 и 35, которые формируются фазо- чуствительными выпрямителями 26 и 27 из полного синусоидального фактического тока статорной обмотки I, поданного на входы задания фазы этих выпрямителей, поляризующими сигналами которых служат фазное напряжение и и сигнал псевдоактивной составляюго выпрямителя 27 подается с блока., щей полного тока статора I, поданны- 30: 4 сдвига фаз сигнал достаточной величи- ми на входы задания опорного сигнала выпрямителей 26 и 27. Псевдоактивная
имеющего коэффициент передачи jl. Благодаря чему моделируемая реактивсоставляющая, так как и псевдореактивная, возникают на выходах формины и с фазой псевдоактивной составляю- щей.Это обеспечено с помощью блока 4,
рователя в первый момент- после изме- 35 ная (псевдореактивная) составляющая
нения рабочего режима машины, когда еще контур регулирования не выработал управляющее воздействие на формирователь 8. Псевдоактивная составляю-р
подаваемая на вход блока 4, поворачивается на его выходе на 90
совпадает по фазе с активной (псев- доактивной) составляющей на выходе щая подается на вход фазочувствитель- 40 фазовращателя 8. Компаратор 46 срав- ного выпрямителя 27 через канал первого информационного входа ключа 49. Таким образом, на выходах фазочувствительных вьтрямителей 26, 27 и вхо- ную величину допустимого тока стато- дах блока 18 сравнения будут сигналы 45 ра, выдаваемую блоком 43 задания
нивает величину располагаемой составляющей I , поступающей с выхода фильтра 36 нижних.частот, и половинсоответственно Icoscp и Icoscj,, где Cf и tf, - углы между током I и соответственно напряжением и псевдоактивной составляющей тока I. В результате на выходе блока 18 сравнения so ние, противоположное, показанному на .фаз образуется рассогласование Icoscf- схеме фиг. 1.
этой -величины. При превьшении величиной IP половинной величины допустимого тока статора компаратор переключает каналы ключа 49 в положе-Icoscf,, которое воздействует на вход задания амплитуд ортогональных составляющих фазовращателя 8, перераспределяя ортогональные составляющие на его выходах. Это приводит к тому, что угол приближается к tp , а величина псевдоактивной составляющей Icos tf, - к величине активной IcosCf.
Функционирование остальной части схемы фиг. 1 состоит в обеспечении управляющего воздействия на вход за- 55 Дания коэффициента усиления управляемого усилителя 13 так, чтобы из лтоступающего на информационный вход ..этого усилителя реактивной составляющей ip фактического полного тока стаД5888010
Рассогласование при этом стремится к нулю. Благодаря непрерьшности такого процесса на выходах фазовраща- 5 теля 8 будут непрерьгоно отслеживаться активная I
о
и реактивная 1р составляющие полного тока статора 1 .
Предусмотренные в устройстве блок 4 сдвига фаз на 90°, компаратор 46, управляющий ключом 49, и блок 43 задания половинной величины допустимого тока статора выполняют вспомогательную функцию, а именно когда активная составляющая тока I незна-
чительна. Псевдоактивная составляю- щая, поступающая через ключ 49 на вход
чительна. Псевдоактивная составляю- щая, поступающая через ключ 49 на вход
фазочувствительного выпрямителя 27, вследствие регулирующего воздействия на преобразователь 8 также становится незначительной, что обусловливает
го выпрямителя 27 подается с блока., : 4 сдвига фаз сигнал достаточной величи-
ны и с фазой псевдоактивной составляю- щей.Это обеспечено с помощью блока 4,
-р
подаваемая на вход блока 4, поворачивается на его выходе на 90
совпадает по фазе с активной (псев- доактивной) составляющей на выходе фазовращателя 8. Компаратор 46 срав-
ную величину допустимого тока стато- ра, выдаваемую блоком 43 задания
нивает величину располагаемой составляющей I , поступающей с выхода фильтра 36 нижних.частот, и половинние, противоположное, показанному на схеме фиг. 1.
этой -величины. При превьшении величиной IP половинной величины допустимого тока статора компаратор переключает каналы ключа 49 в положеФункционирование остальной части схемы фиг. 1 состоит в обеспечении управляющего воздействия на вход за- 55 Дания коэффициента усиления управляемого усилителя 13 так, чтобы из лтоступающего на информационный вход ..этого усилителя реактивной составляющей ip фактического полного тока ста
торной обмотки I иметь на выходе сигнал моделируемого реактивного тока ip.
Формула изобретения I
Устройство для вычисления располагаемой реактивной мощности явнополюс ньк синхронных машин, содержащее датчик текущего напряжения статора, датчик текущего тока статора, выход которого через преобразователь тока в напряжение подключен к входу задатния-фазы первого фазочувствительно- го вьшрямителя, вход задания опорного сигнала которого соединен с выходом датчика текущего напряжения статора, а выход через первьш фильтр нижних частот - с первым входом блока Сравнения фаз, к второму входу которого через второй фильтр нижних частот подключен выход второго фазо- чувствительного выпрямителя, блок сдвига фазы на 90 , два усилителя, фазовращатель, четыре сумматора,три управляемых усилителя, умножитель, блок нелинейности типа экспоненты, чтыре блока сравнения, три элемента вборки и хранения, пять выпрямителей, третий, четвертый, пятьш, шестой, седьмой и восьмой фильтры нижних частот, блок задания тока iхолостого хода ротора, блок задания допустимого тока статора, два компаратора, блок синхронизации и восемь ключей, причем выход первого выпрямителя, через третий фильтр нижних частот соединен с входом первого компаратора и одним из входов умножителя, выход которого является выходом устройства а выход первого компаратора соединен с управляющим входом первого ключа, выход первого управляемого усилителя подключен к одному из входов первого сумматора, выход которого присоединен к первому информационному входу второго ключа, входу первого усилителя и входу второго выпрямителя, выход которого через четвертый фильтр Нижних частот соединен с первым входом первого блока сравнения, второй вход которого подключен к выходу блока задания допустимого тока статора, выход первого усилителя соединен с первым входом второго сумматора, второй вход которого подключен к выходу датчика текущего напря- . жения статора, а выход через третий
5888012
выпрямитель и пятый фильтр нижних частот - к входу блока нелинейности типа экспоненты, выход которого сое- g динен с вторым информационным входом второго ключа, подключенного выходом к информационному входу второго управляемого усилителя, выход которого соединен с одним из входов второ10 го блока сравнения, другой вход которого присоединен к выходу блока задания тока холостого хода ротора, а выход - к информационному входу третьего ключа, выход которого через
15 первый элемент выборки и хранения соединен с входом задания коэффициента усиления второго управляемого усилителя, выход второго усилителя соединен с первым входом третьего сум20 матора, выход которого подключен к входу четвертого выпрямителя, присоединенного выходом к входу шестого фильтра нижних частот, выход четвертого сумматора подключен к
25 первому информационному входу четвертого ключа, выход которого соединен с информационным входом третьего управляемого усилителя, подключенного выходом к первому входу тр е-
30 тьего блока сравнения, выход которого подключен к информационному входу пятого- ключа, подключенного выходом через второй элемент выборки и хранения к входу задания коэффициента
35 усиления третьего управляемого усилителя, выход третьего элемента выборки и хранения соединен с первым информационным входом шестого ключа и первым входом второго компаратора,
40 выход которого соединен с управляющим входом шестого ключа, выход блока синхронизации соединен с управляющими входами второго, третьего, четвертого, пятого, седьмого и вось45 мого ключей, отличающееся тем, что, с целью повьштения точности вычислений, в него введены дополнительно третий фазочувствительный выпрямитель , третий усилитель, блок
50 задания допустимого тока ротора и блок задания половинной величины допустимого тока статора, причем выход преобразователя тока в напряжение соединен с первым информационным
55 входом фазовращателя и входом задания, фазы второго фазочувствительного выпрямителя, вход задания опорного сигнала которого подключен к выходу первого ключа, подсоединенного пер 31458880
вым информационным входом к второму входу первого сумматора и к первому выходу фазовращателя, второй выход которого соединен с информационным входом первого управляемого усилителя, а второй информационный вход - с выходом блока сравнения фаз, выход первого управляемого усилителя соединен с входом первого выпрямителя и с входом блока сдвига фаз на 90, выход которого подключен к вто- рому информационному входу первого ключа, вход пятого вьшрямителя соединен с выходом датчика текущего напряжения статора, а выход через седьмой фильтр низких частот - с вторым входом умножителя, выход блока задания половинной величины допустимого тока статора подключен к второму входу первого компаратора, выход первого блока сравнения соединен с вторым входом второго компаратора и вторым информационным входом естого ключа, выход которого подлючен к входу задания коэффициента усиления первого управляемого
уси сое сум g го цио ход рог лит
10 вхо ств дан сое тор
15 ниж вер рог ра тог
20 ход тел зад вых мог
25 чен ки
80
1
усилителя, выход второго сумматора i соединен с вторьгм входом третьего сумматора, выход второго управляемо- го усилителя подключен к информационному входу седьмого ключа, выход которого соединен с входом второго усилителя и входом третьего усилителя, выход которого подключен к
входу задания фазы третьего фазочув- ствительного выпрямителя, вход задания опорного сигнала которого соединен с выходом третьего сумматора, а выход через восьмой фильтр
нижних частот - с первым входом четвертого сумматора, второй вход которого подключен к выходу шестого фильтра нижних частот, первый вход четвертого блока сравнения соединен с выходом третьего управляемого усилителя, второй вход - с выходом блока задания допустимого тока ротора, а выход - с информационным входом восьмого ключа, выход которого подключен к входу третьего элемента выборки и хранения сигнала.
-г
-л.
л. ef
/ / /у тд1 t
/f J CLCll
J- i-
f
/X//« /..yl
Yx rf-xe/;/
у farf-A gJ/ /jt;; |Д V4,)/j
ii
«Л
.2
| - Маркович И.М | |||
| Режимы энергетических систем | |||
| М.: Энергия, 1969, с | |||
| САННЫЙ ВЕЛОСИПЕД С ВЕДУЩИМ КОЛЕСОМ, СНАБЖЕННЫМ ШИПАМИ | 1921 |
|
SU265A1 |
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
