со
00
О5 4;:
СО
Изобретение относится к электроэнергетике, а именно к управлению режимами работы энергосистем, и может быть использовано для непрерывного контроля располагаемой реактивной мощности неявнополюсных синхронных машин, как правило турбогенераторов .
Цель изобретения - упрощение операций и повып1ение точности способа моделирования располагаемой реактивной йощности турбогенератора.
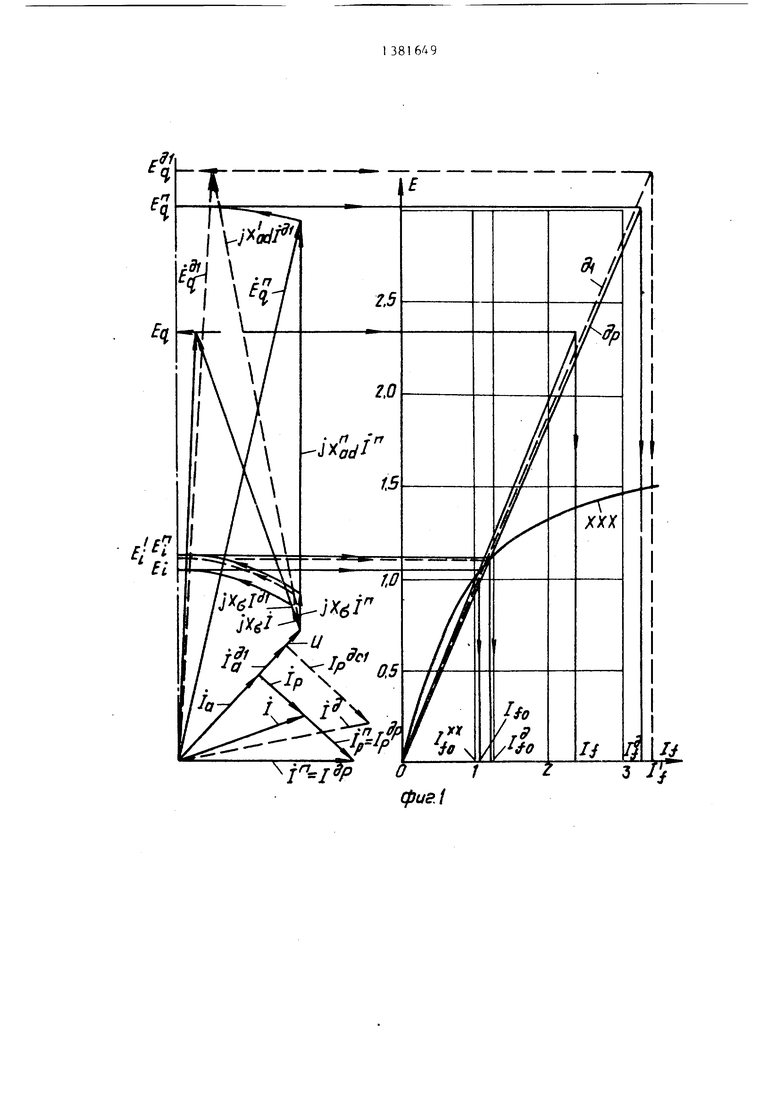
На фиг.1 приведены векторные диаграммы формирования внутренней ЭДС ЭДС поперечной оси, характеристика холостого хода (XXX) и использование
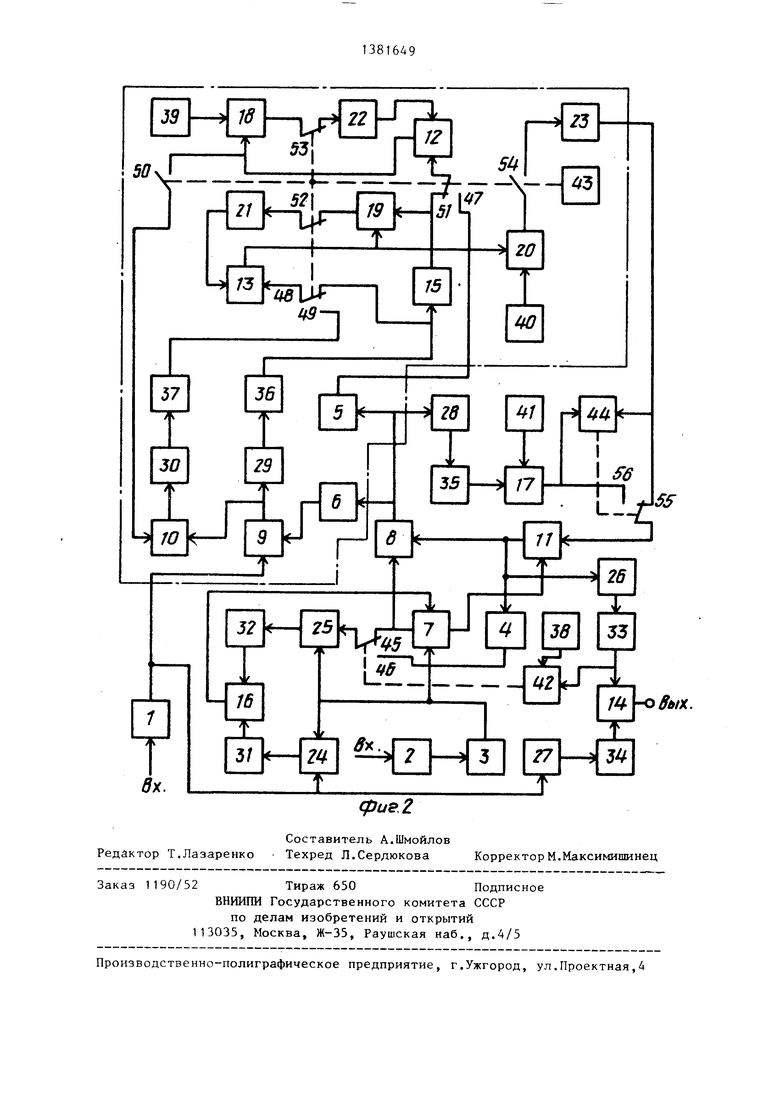
нх для определения тока ротора; на фиг.2 - пример выполнения блок-схемы устройства, осуществляющего способ .
Способ состоит в том, что измеряют текущее фазное напряжение U и фактический полный ток статора обмотки I, который разлагают на текущие активную (совпадающую по фазе с на- пряже}1ием U) Ij и реактивную „ составляющие, последнюю увеличивают и суммируют с фактической активной состав.ляющей. В зависимости от за- гручки генераторп фактический ток статор I может быть различным, различной может Df-iTb и его активная со- станлялч1и1я, например I,. Сумма фактической активной и моделируемой реактивной составляющих является моделируемым полным током статора, ве- которого сравнивают с допус- гиммм значением по условиям обмотки статора. При достижении моделируемым током статора допустимого значения он равен вектору I , реактивная составляющая которого 1 (при активной ip) является допустимым реактивным током по условиям обмотки статора. Однако величина последнего IP не может однозначно считаться располагаемым реактивным током In,
yi
равно как и вектор тока I не может быть назван располагаемым полным током I машины, так как их величины определень только из одного условия - допустимого тока статора - в то время как они обусловлены также допустимой величиной тока ротора. Оба условия выражаются в виде совместного непревышения полным моделируемым током статора допустимого значения для статорргой обмотки и моделируемым током ротора, соответствующим определенному полному току статора и реактивному току машины, допусти- мой величины для роторной обмотки. Конкретно эти условия распадаются на два совместных предельных соотношения, когда моделируемый ток статора равен допустимой величине, а мо0 делируемый ток ротора не превышает своей допустимой величины и наоборот. В обоих случаях реактивный ток машины является располагаемым, причем в первом случае он получен из ус5 ловия допустимого тока статорной обмотки, а условие роторной обмотки его не ограничивает. Во втором случае реактивный ток получен из условия допустимого тока роторной обмот0 ки, при этом условие статорной обмотки его также не ограничивает. Второй случай при фактическом активном токе Ij отражен на векторной диаграм5
0
5
Мб располагаемых реактивного I,
р и полного I токов, равных векторам соответственно 1рР и I , у которых верхний индекс Эр свидетельствует о равенстве тока ротора допустимой величине.
0 Достижения указанных двух предельных соотношений добиваются через различные промежуточные соотношения для моделируемых токов статора и ротора относительно своих допустимых
5 значений, среди которых выделяют
аналогично двум предельным два соотношения, в которых как и в предельных имеет место равенство одного из моделируемых токов своему допустимо0 му значению, в то время другой моделируемый ток превышает свою допустимую величину. Один такой случай при фактическом активном токе представлен на векторной диаграмме, а
5 именно, когда имеет место равенство величины полного моделируемого тока статора его допустимому значению однако моделируемый ток ротора превышает свое допустимое значение.Это отражено в обозначении верхнего индекса моделируемого реактивного тока I , в котором 9с означает выполнение равенства величины полного тока статора допустимому значению, а штрих - промежуточное соотношение или невыполнение условия непревыше- ния током ротора допустимой величины.
Необходимость выполнения условия непревышения током ротора допустимой
величины требует непрерывного его вычисления при изменении реактивного тока машины. Делают это путем выполнения последовательности операций .
Рассмотрим эти операции на примерах трех разных режимов генератора, имеющих место при моделировании располагаемого реактивного тока: в одном из исходных режимов, характеризующемся полным током статора I, в одном из промежуточных режимов, когда ток статора равен допустимому значению, но ток ротора превышает допустимую величину, т.е. в режиме. с полным током статора I , в одном из предельных режимов, при котором достигнут располагаемый реактивный ток по условию равенства тока ротора допустимому значению, а ток статора при этом не превышает допустимой величины, т.е. в режиме с полным током статороной обмотки I .
Указанную последовательность начинают с определения падения напряжения на активном Гд и индуктивном сопротивлении рассеяния jx(5 от протекания полного тока статора. Величина активного сопротивления статор ной обмотки ничтожно мала, пoэтo fy е пренебрегают, принимая г . 0. Тогд падение напряжения для исходного, промежуточного и предельного режимо равно jxol, jxci , JKOf. CyNiMHpo- вание их с текущим напряжением U дч ет внутреннюю ЭДС для каждого из расматриваемых режимов соответственно
:Э
Е; и + jxGI;
Е:
- и +
П п Е; и + .
По величине внутренней ЭДС Е; , с помощью XXX (зависимости
Е
напряжения холостого хода или внутренней ЭДС при нагруз:;е генератора от тока ротора) определяю ток намагничивания машины, приведенный к об- могке ротора для исходного . , промежуточного 1 току ротора I. ло координат XXX и точки (1 , Е; ) для исходного. (1 , Е . ) для промежуточного, (1, , Е) для предельного режима проводят прямые или нагрузочные характеристики соответственно без обозначения, 9i и Эр , наи предельного по режимов. Через нача
клон которых определяет режим магнитной системы генератора, степень
ее насыщения. По известному сопрос с тивлению взаимоиндукции -j
- X Q- и синхронному реактансу Xj , соответствующим точке XXX (1г ,Е-
,, XV , ч„ ID
и 1;, в которой внутренняя ЗДС равна номинальному или единичному значению в относительных единицах напряжения, а ток намагничивания ротора - току ротора при холостом ходе генератора, и кратности отличия тока намаг ничивания соответствующего режима от тока холостого хода находят сопротивление взаимоиндукции машины в данном режиме:
20
ad
X
ad
25
ad
Определяют падение напряжения от протекания моделируемого тока статора по сопротивлению взаимоиндукции соответственно в исходном, промежуточном и предельном режимах: jx ,1, т 9i п ,п ,od
JX jl , тх. I . Данное падение наС| оО О
пряжения суммируют с внутренней ЭДС в каждом из режимов, в результате получают ЭДС поперечной оси
Е; Э( л1 . 1 Э|
Е
+ JX Л - ad
Е. Е
JX
По модулю ЭДС поперечной оси в каждом из режимов Е,, EQ , Е с помощью нагрузочной характеристики соответствующего режима: без обозначения, 9| , 9р определяют ток ротора l в исходном, 1 в промежуточном и l| предельном режимах. Последние могут быть найдены также по формулам:
5
h
io Е
EI
I.
I
jL
El
П
Еа.
io Е
Полученный ток ротора находится в однозначной, однако нелинейной и неявной зависимости от моделируемых реактивного и полного тока статора, фактического активного тока и напряжения статорной обмотки. Использование в предложенном способе операции определения тока ротора по нагрузочной Характеристике обеспечивает простоту и точность. Наклон прямой нагрузочной характеристики однозначно связан с характеристикой холостого хода, а следовательно, с текущим режимом генератора. Это позволяет с помощью линейных операций учесть изменение сопротивления взаимоиндукции вследствие насыщения магнитной системы и простым и однотипным - с операциями определения внутренней ЭД и тока намагничивания - путем обеспечить получение тока ротора. Ток намагничивания находят в последовательности: определяют падение напряжения от полного тока статора на активном сопротивлении и сопротивлении рассеяния статорной обмотки, это падение напряжения суммируют с текущим напряжением, что дает внутреннюю ЭДС, по величине которой с помощью XXX получают ток намагничивания. Ток ротора в предложенном способе после учета изменения сопротивления взаимоиндукции из-за насьпцения магнитной системы получают в аналогичной последовательности: определяют падение напряжения от полного тока статора на сопротивлении взаимоиндукции,это падение суммируют с внутренней ЭДС,
что дает ЭДС поперечной оси, по величине которой с помощью нагрузочной характеристики находят ток ротора. Все операции по определению тока в роторе являются линейными.
Способ дозирования величины реактивной составляющей тока статора с последующим сравнением величин полного тока статора и ротора с допустимыми величинами является рационально последовательностью операций. Изменение реактивного тока при текущих активном токе и напряжении исходя из условий непревышения токами статора и ротора допустимых значений, должно производиться в сторону увеличения, если полный ток статора и ток ротора совместно меньще допустимых величин и это увеличение прекращается при достижении хотя бы одним из этих то0
5
0
5
0
5
0
5
0
5
ков допустимого значения.Если хотя бы один из токов превыщает свое допустимое значение, то моделируемый реактивный ток изменяется в противоположную сторону, т.е. уменьщается, пока по одному из токов не будет достигнуто равенство с допустимой величиной, а по другому непревышение допустимого значения.
Способ характеризуется простотой, линейностью и однотипностью операций, что обусловливает повьппение точности моделирования располагаемого реактивного тока.
Устройство (фиг,2) содержит трансформатор 1 напряжения, трансформатор 2 тока, преобразователь 3 синусоидального тока в синусоидальное напряжение, преобразователь 4 синусоидального напряжения в синусоидальное напряжение, сдвинутое на 90, преобразователи 5 и 6 синусоидального сигнала в синусоидальное напряжение, преобразователь 7 синусоидального напряжения в ортогональные компоненты, суммирующие 8-10 и управляемые 11-13 усилители, блок 14 умножения, блок 15 нелинейности, блоки 16-20 сравнения, запоминаю1цие элементы 21-23, фазочувствительные выпрямители 24 и 25, выпрямители 26-30, фильтры 31-37 нижних частот, источники 38-41 заданного сигнала, компаратор 42, таймерное устройство 43, компаратор 44, управляющие соответственно ключами 45, 46, 47-54, 55, 56.
На входы трансформатора 1 напряжения и трансформатора 2 тока поданы соответственно первичные фазное напряжение и ток статорной обмотки синхронной машины. Выходы этих трансформаторов, на зажимах которых имеют место соответственно вторичное фазное напряжение U и ток статорной обмотки I, соединены с различными блоками схемы фиг.2: выход трансформатора напряжения - с одним из входов фазочувствительного выпрямителя 24 (ФВ1), суммирующего усилителя 9 (СУ2), а также через выпрямитель 27 (В2) и фильтр 34 нижних частот (Ф4) - с одним из входов блока 14 умножения (МУ); выход трансформатора тока через преобразователь 3 - с другим входом фазочувствительного выпрямителя 24 (ФВ1), одним входом фазочувствительного выпрямителя 25 (ФВ2) и преобразователя ортогональ713
ных составляющих 7 (ПОС). Выходы фа- зочувствительных выпрямителей 24 (ФВ1) и 25 (ФВ2) черет фильтры 31 нижних частот (ф1) и 32 (Ф2) присоединены к входам блока 16 сравнения (БС1), выход которог о подключен к второму (управляющему) входу преобразователя ортогональных составляющих 7 (ПОС). Один выход последнего со- единен соответственно с одним из входов суммирующего усилителя 8 (СУ1) и через ключ 49 с другим входом фазо- чувствительного выпрямителя 25 (ФВ2) другой выход - с одним из входов уп- равляемого усилителя 11 (УУ1). Выход управляемого усилителя 11 подключен к другому входу суммирующего усилителя 8 (СУ1), через преобразователь 4 (ПС1) и ключ 46 - к другому входу фаэочувствительного выпрямителя 25 (ФВ2), через выпрямитель 26 (В1), фильтр 33 (ФЗ) - к другому входу блока 14 умножения (ГУ) и одному из входов компаратора 42 (К1), дру гой вход которого соединен с источником 38 заданного сигнала (ОС). Выход суммирующего усилителя 8 (СУ1) подключен через преобразователь 6 (ПСЗ) к другому входу суммирующего усилителя 9 (СУ2), через преобразова тел ь 5 (ПС2) и ключ 47 - к функциональному входу управляемого усилителя 12 (УУ2), через выпрямитель 28 (ВЗ) и фильтр 35 (Ф5) - к одному из входов блока 17 сравнения (БС2),дру- гой вход которого соединен с источником 41 заданного сигнала (ДС), а выход - с одним из входов компаратора 44 (К2) и через ключ 56, управля- емый этим компаратором, - с другим (управляющим) входом управляемого усилителя 11 (УУ1). Выход суммирующего усилителя 9 (СУ2) соединен с одним из входов суммирующего усилителя 10 (СУЗ), а через выпрямитель 29 (В4), фильтр 36 (Фб) - с входом блока 15 нелинейности (БН) и дополнительно через ключ 48 - с входом управляемого усилителя 13 (УУЗ), который через ключ 49, фильтр 37 (Ф7), выпрямитель 30 (В5) подключен к выходу суммирующего усршителя 10 (СУЗ) Другой вход последнего через ключ
50присоединен к одному из входов блока 18 сравнения (БСЗ) и выходу управляемого усилителя 12 (УУ2),функциональный вход которог о через ключ
51соединен с выходом блока 15 нели
fo 1 20 5 OQ .„
5
5
498
нейности (БН) и одним из входов блока 19 сравнения (БС4), друго вход которого подключен к выходу управляемого усилителя 13 (УУЗ) и другому ия входов блока 20 сравнения (БС5), а выход через ключ 52, запоминающий элемент 21 (331) - к другому (управляющему) входу управляемог о усилителя 13 (УУЗ). Другой вход Олока 20 сравнения (БС.5) присоединен к источнику 40 заданного сигнала (ДР), а выход через ключ 54 и запоминаю ций элемент 23 (ЗЭЗ) - к другому входу компаратора 44 (К2) и дополнительно через ключ 55 - к другому (управляющему) входу управляемого усилителя 11 (УУ1). Другой вход блока 18 сравнения (БСЗ) соединен с источником 39 заданного сигнала (ИХ), а выход через ключ 53 и запоми 1аю|ций элемент 22 (ЗЭ2) с управляющим входом управляемого усилителя 12 (УУ2). Выход блока 14 умножения (МУ) является выходом сигнала моде1П1руемой располагаемой реактивной мощности.
Устройство работает следующим образом .
Первичное напряжение и ток статор- ной обмотки синхронной машины подаются на входы соответственно трансформатора 1 напряжения (ТН) и трансформатора 2 тока (ТТ). Вторичное напряжение и с выхода ТН использовано как входной синусоидальный сигнал для ряда блоков: в суммирующем усилителе 9 (СУ2) оно суммируется с другим синусоидальным сигналом, в фазо- чувствительном выпрямителе 24 (ФВ1) оно использовано как поляризующий (опорный) сигнал, с помощью выпрямителя 27 (В2) и фильтра 34 нижних частот (Ф4) оно преобразуется в сигнал постоянного тока U, который подается на один из входов множительного блока 14 (МУ). На другой вход этого блока через выпрямитель 26 (В1) и фильтр 33 (ФЗ) поступает вырабатываемый устройством синусоидаль- V ныи располагаемый реактивный ток 1р
в виде сигнала постоянного тока „. На выходе блока 14 (ГУ) имеет место
моделируемая величина располагаемой.
п
реактивной мощности Q UIp, Моделирование располагаемого реактивного
п тока 1р является основной функцией
устройства. Реализация этой функции осуществляется через управ.чяемый усилитель 11 (УУ1), на функциональный вход KOTojioro подан реактивный ток рабочего режима (текущий или фактический реактивный ток) 1р, вьщеля- емый из полного тока 1 этого режима. На управляющий вход усилителя 11 поступает управляющее воздействие, изменяюшее его коэффициент передачи Kji так, чтобы на его выходе отрабатывался сигнал располагаемого реак- тивного тока In. Выделение реактивного тока рабочего режима 1р осущест- вляе-Гся преобразователем 7 ортогональных составляющих (ПОС), на функциональный вход которого подано си- нусоида.чьное напряжение, равное пол- ноьгу юку статорной обмотки Г , которое формируется на выходе преобразо- вате.чя 3 (ПТ) из вторичного тока трансформатора тока, поступаюшего на вход 3 (ПТ). На выходах преобразователя 7 (ПОС) формируются ортогональные составляющие сигнала I, которые не являются активной и реактивной состар: ЯЮ цей тока 1, Такими они ста- нопятся благодаря функционированию контура регулирования на основе блока К) сравнения (БС1), воздействующего }ia управляющий вход (соответствующий параметр схемы) преобразовате ля 7 (ПОС) так, что ортогональные составляющие перераспределяются,стремясь к активной и реактивной состав- ляюш.им. Чтобы достигнуть этого, на входы блока сравнения поданы сигналы постоянного тока через фильтры 31 (Ф1) и 32 (Ф2), которые формируются фазочуиствительными выпрямителями 24 (ФВ1) и 25 (ФВ2) из полного синусо- идальн(л о фактического тока статорной обмотки I, поданного на одноименные (;х(-1ды этих вр)1прямителей, поляризующими сигналами которых служат фазное напряжение U и сигнал псев- доактинной соспавляющей полного тока статора I, поданными на другие одноименные входы.Псевдоактивная составляющая также как и псевдореактивная возникают на выходах 7 (ПОС) в первый момент после изменения рабочего режима машины, когда еще контур регулирования не выработал управляющее воздействие на ПОС. Псевдоактивная составляющая подается на вход фазо- чувствптельного выпрямителя 25 (ФВ2) через ключ 45.
Таким образом, на выходах фазо- чунстБительных выпрямителей 24 и 25 и входах блока 16 сравнения (БС1)
, Q«с 20 25зо
164910
будут сигналы соответственно Icos Cf и IcosCfi , где Cf и ср, - углы между током i и соответственно напряжением и и псевдоактивной составляющей тока I. В результате на выходе блока сравнения образуется рассогласование IcosCf - IcosCf, , которое воздействует на управлякщий вход преобразователя 7 (ПОС), перераспределяя ортогональные составляющие на его выходах. Это приводит к тому, что угол Cfi приближается к Cf , а величина псевдоактивной составляющей Icos Cfi - к величине активной Icosif. Рассогласование при этом стремится к нулю. Благодаря непрерывности такого процесса на выходах преобразователя 7 (ПОС) непрерывно отслеживаются активная Ij и реактивная In составляющие полного тока статора.
Предусмотренные в схеме преобразователь 4 (П01), компаратор 42 (К1), управляющий ключами 45, 46 и источ- ник 38 заданного сигнала (ОС) выполняют вспомогательную функцию, а именно, когда активная составляющая тока I незначительна. Псевдоактивная составляющая при этом, поступающая через ключ 45 на вход фазочувствитель- ного выпрямителя 25 (ФВ2), вследствие регулирующего воздействия на преобразователь 7 (ПОС) также становится незначительной, что обусловливает некачественную поляризацию фазочувстви- тельного выпрямителя 25 (ФВ2). Чтобы это устранить компаратор 42 (К1) размыкает ключ 45 и замыкает ключ 46. В результате на вход 25 (ФВ2) подается с преобразователя 4 (ПС1) сигнал достаточной величины и с фазой псевдоактивной составляющей. Это обеспечено с помощью преобразователя 4 (ПС1), имеющего коэффициент передачи j,, вследствие чего моделируемая реактивная (псевдореактивная) составляющая 1р, подаваемая на вход 4 (ПС1),поворачивается на его выходе на 90 и совпадает по фазе с активной (псевдоактивной) составляющей на выходе 7 (ПОС). Компаратор 41 (К1) сравнивает величину располагаемой реактивной составляющей „, поступающей с выхода фильтра 33 (ФЗ), и заданную величину, выдаваемую источником 38 заданного сигнала (ОС). При превыщении величиной „ заданного сигнала компаратор переключает ключи 45 и 46 в положение, противоположное показанному на схеме фиг.1.
Функционирование остальной части схемы фиг.2 состоит в обеспечении
управляющего воздействия на управляющий вход управляемого усилителя 11 (УУ1) так, чтобы из поступающего на функциональный вход этого усилителя реактивной составляющей 1р фактического полного тока статорной обмотки I иметь на выходе сигнал моде I
лируемого реактивного тока 1р, стремящегося к располагаемому реактивно п му току IP по условиям допустимых
токов либо статора 1р , либо ротора IP IP . Можно выделить две группы блоков и контуров схемы, реализующих соответственно управляющее воздействие: по условию допустимого тока статора (выпрямитель 28 (ВЗ), фильтр 35 (Ф5), блок 17 сравнения (БС2), источник 41 заданного сигнала (ДС), компаратор 44 (К2),управляющий ключом 56) и контур регулирования на основе блока 20 сравнения (БС5) по условию допустимого тока ротора (все остальные блоки, элементы, контуры, обведенные штрихпунктир- ной линией). Суммирующий усилитель 8 (СУ1) является общим необходимым блоком для функционирования блоков и контуров ПС условию допустимого тока как статора, так и ротора. Этот усилитель суммирует фактический активный Ig с выхода блока 7 (ПОС) и моделируемый реактивный 1р токи с выхода управляемого усилителя 11 (УУ1). В результате на его выходе моделируется полный ток статора I
+ I
р, который отрабатывается
контурами по условию допустимых токов статора и ротора путем изменения тока IP в направлений доведения его
т
Д° IPКонтур моделирования 1. по условию допустимого тока статора, т.е. 1р Ip состоит из объекта регулирования - управляемого усилителя 11 (УУ1), регулятора - блока 17 сравнения (БС2), сумматора 8 (СУ1), выпрямителя 28 (ВЗ), фильтра 35 (Ф5), компаратора 44 (К2), управляющего ключами 56, 55,источника 41 заданного сигнала (ДС). Полный синусоидальный ток I с выхода 8 (СУ1), пройдя выпрямитель 28 (ВЗ) и фильтр 35 (Ф5), преобразуется на одном из входов блока 17 сравнения (БС2) в сигнал по0
0
стоянного тока I . На,другой вход блока сравнения подается сигнал постоянного тока с источника 41 заданного сигнала (7IC), равный по яеличи- не I . Таким образом, на выходе блока сравнения образуется рассогласование I - I , которое поступает на один из входов компаратора 44 (К2), На другой вход этого компаратора приходит рассогласование между моделиЭ
руемым полным I, и допустимым If токами ротора, т.е. 1 - I . Эти рассогласования сравниваются компаратором 44 (К2) и то, которое из них меньще по абсолютному значению подключается с помощью ключей 55 и 56 на управляющий вход управляемого усилителя 11 (УУ1). Если I - 1 - 1 - - 1 , то компаратор 44 переводит ключи 55 и 56 в положение, противоположное показанному на схеме фиг.2. Это обеспечивает подключение на управляющий вход 11 (УУ1) рассогласования
25 I - I
следовательно, отработ0
5
0
5
0
5
ку на выходе управляемого усилителя 11 (УУ1) располагаемого реактивного тока по условиям допустимого тока
статора, т.е.
-
Эс Р
а на выходе
суммирующего усилителя 8 (СУ1) - полного тока статора, соответствующего названному располагаемому реактивному току, т.е. l I .
Оставщуюся часть схемы можно определить как обобщенный формирователь, вырабатывающий рассогласование I .J - ., который вместе с управляемым 11 (УУ1) и суммирующим 8 (СУ1) усилителями, компаратором 44 (К2) и ключом 55 образуют обобщенный контур моделирования располагаемого реактивного тока по условию допустимого тока ротора, т.е. 1р I р .
Названный обобщенный формирователь можно подразделить на ряд контуров, работающих в разделенном времени двух режимов, которые можно назвать соответственно режимом подготовки и режимом регулирования. Время существования и структуру блоков режимов определяет таймерное устройство 43 (Т), которое управляет ключами 47-54. В положении ключей, показанном на схеме фиг.2, имеет место режим подготовки, в противоположном положении - режим регулирования. Рассмотрим работу обобщенного преобразователя в режиме подготовки, назначением которого является отработка
двух отношений: тока намагничивания холостого хода к току намагничивания моделируемого режима , /lig и последнего тока к внутренней ЭДС 1г /Е. . Это цели служат соответст±0
венно два контура регулирования: контур обработки l j /If на основе управляемого усилителя 12 (УУ2) и блока 18 сравнения (БСЗ) и контур отработки отношения l /Е; на основе управляемого усилителя 13 (УУЗ) и блока 19 сравнения (БС4) .
Для функционирования контура отработки отношения . /. формируется внутренняя ЗДС;: на вход преобразователя 6 (ПСЗ) с выхода суммирующего усилителя 8 (СУ1) поступает моделируемый синусоидальный полный ток статорной обмотки I , на выходе этого преоГ)рачог(агеля образуется сигнал (г + к, i ,который, суммируясь с фаз1П)1м млпряженисм U на суммирующем усилителе 9 ( СУ2), на его выходе образует внутрень юк) ЭДС Е U - (г, + ixQ.) l . С.ииусоилальный сигнал внутренней ЭЛС, пройдя через выпря- штелт- 29 (В4) и 36 (Ф6), преобразуется в сигнал постоянного тока К., подаваемый на вход блока 15 не- .чинейпости (1И1). Па выходе блока не- 1ИНС1П1ОСТИ, моделирующего характери- v-.iiH.y xc -iocToi-Q хода машины, обра- сигнал TtiKa намагничивания I, , которьш через ключ 51 поступа 0
ст на функциональный вход управляемого усилителя 12 (УУ2), а сигнал с выхода 12 (УУ2) I.{ подан на один из входов блока 18 сравнения (БСЗ). На другой вход этого блока сравнения поступает сигнал с источника 39 заданного сигнала (НХ), равный по ве- .личине току намаг ничивания холосто- I o хода I. . На выходе 18 (БСЗ) об
ic
разуется рассогласование I
- I
«X
fo
которое через 53 и запоминающий элемент 22 (332) воздействует на управляющий вход усилителя 12 (УУ2), В результате образуется контур ре- гулирюнания и.з блоков 12 (УУ2), 18 (БСЗ), 39 (НХ), ключа 53, запоминающего 22 (ЗЭ2), который отрабатывает рассогласование, устремляя его к нулю, т.е. 1, - I, - О или
(If ДJ-O о
1г Ij . Это обусловливает коэффи- 0 - о
пиент передачи уирав. шемого усилителя I, /i if /Ъ . Благодаря
ID - о 1о -о „„ /„,т запоминающему элементу 22 (332) отработанный ко )ффициент передачи
0
0
сохраняется в течение режи о о
ма регулирования.
Контур отработки отношения I.f /Е использует сигналы внутренней ЗДС
Е и соответствующего ей тока на 1
магничивания I, , имеющих место на
входе и выходе блока 15 нелинейности (БН). Зтот контур образован следующими элементами и блоками: управляемым усилителем 13 (УУЗ), блоком 19 сравнения (БС4), ключом 52 и запоминающим элементом 21 (331). На функциональный вход управляемого усилителя 13 (УУЗ) через ключ 48 подается сигнал Е; со входа блока нелинейности. На выходе этого усилителя образуется сигнал Е ; , который поступает на один из входов блока 19 сравнения (БС4). На другом входе этого блока дежурит сигнал тока намагничивания It . На выходе 19 (БС4)
П(.
образуется рассогласование Е,
- I
5
0
которое через ключ 52 и запоминающий элемент 21 (331) поступает на управ - ляющий вход усилителя 13 (УУЗ). В результате имеет место контур регулирования, отрабатывающий рассогласование, устремляя его к нулю, т.е. Е - I - 0. Благодаря этому коэффициент передачи усилителя 13 (УУЗ) ста1
III
Е; lie
новится равным
Е
Согласно
5
0
5
0
5
фиг.1 I, /Е; I
/Е 1/К
i, где
Кг - нелинейный коэффициент взаимо- 1I
связи ЗДС поперечной оси Ед, и тока ротора I, . Запоминающий элемент 21 (331) обеспечивает сохранение коэффициента Кг на усилителе 13 (УУЗ) в режиме регулирования.
Режим и структура регулирования формируются с помощью таймерного устройства 43 (Т), которое переводит ключи 47-54 в противоположное положение. В этом режиме сигнал моделируемого полного синусоидального тока статора I , проходя преобра ова- тель 5 (IIC2) , на его выходе преоб- разуется в напряжение jx , , которое через ключ 47 подается на функ- циональньй вход управляемого усилителя 12 (УУ2), а на его выходе будет ;
сигнал JX , -т°
Зтот сигнал
fc
через ключ 50 поступает на один из входов суммирующего усилителя 10 (СУЗ), на другой вход которого пода151381649
внутренняя ЭДС EI. Тогда на де этого усилителя формируется в поперечной оси Е.
с к з о м р ю т с д т о с о
I I
Е, Е;
,
) I
Сигнал ЭДС Е, пройдя через выпрямитель 30 (В5) и фильтр 37 (Ф7), преобразуется в сигнал постоянного тока ЕЛ, который через ключ 48 подан на функциональный вход управляемого усилителя 13 (УУЗ), На выходе этого усилителя будет сигнал полноt ;
l Е f Е .
го тока ротора, т.е.
К,Ел. Этот сигнал подается на один Из входов блока 20 сравнения (БС5),
гЭ
ся на параметрах самих контуров и по казателях качества процесса регулирования, т.е. все процессы стабилизации и отслеживания в устройстве осуществляются одноконтурными системами регулирования, например контурами отслеживания активной составляющей фактического тока статора, контурами отслеживания полного тока статора и полного тока ротора исходя из допустимого тока статора и ротора, вспомогательными контурами в режиме подготовки по отслеживанию отношения токов намагничивания холостого хода и текущего режима машины, отношения последнего к внутренней ЭДС.
Обеспечение в устройстве процеса на другой вход - сигнал I. с источ- 20 ° отслеживания и стабилизации по- ника 40 заданного сигнала (ДР). На
средством одноконтурных систем регулирования позволяет выбрать большие коэффициенты усиления регуляторов (блоков сравнения) и малые постоянные времени контуров, что снижает время и повьшгает качество регулирования. Это важно для реализации устройства, так как отслеживание тока ротора выполняется в разделенном вре мени двух режимов - подготовки и непосредственно регулирования. Время этих режимов задается таймерным устройством. При этом чем меньше времена регулирования в каждом из режимов, тем меньше могут быть заданы
выходе блока сравнения -образуется
т
рассогласование
h которое через ключ 54 и запоминающий элемент 23 (ЗЭЗ) поступает на один из входов компаратора (К2), который сравнивает рассогласование по току ротора 1| - 1 и току статора l - I , В режиме подготовки запоминающий элемент 23 (ЗЭЗ) хранит рассогласование 1 - - L, , которое совместно с рассогласованием l - I участвует в обработке коэффициента передачи управляемого усилителя 11 (УУ1). Данная отработка ведется до тех пор пока на выходе 11 (УУ1) не будет получен располагаемый реактивный ток 1р либо
по условию допустимого тока статора IP р либо по условию допустимого тока ротора 1р Ip . Первое имеIP In . Первое и 1 - 1 1 - ij и
ет место, если I - i° i, 17 и регулирование коэффициента передачи 11 (УУ1) ведется чеоез ключ 56, а второе - при
I 1
чf
когда
регулирование коэффициента передачи осуществляется через ключ 55, Благодаря указанному порядку процесс происходит устойчиво и без перерегулирования.
Таким образом, схема устройства представляет собой многоконтурную систему автоматического регулирования, однако функционирование контуров происходит практически независимо друг от друга. Взаимосвязь контуров обусловлена только использованием в одних контурах регулирования выходных сигналов других контуров регулирования, что не сказывает1 6
ся на параметрах самих контуров и показателях качества процесса регулирования, т.е. все процессы стабилизации и отслеживания в устройстве осуществляются одноконтурными системами регулирования, например контурами отслеживания активной составляющей фактического тока статора, контурами отслеживания полного тока статора и полного тока ротора исходя из допустимого тока статора и ротора, вспомогательными контурами в режиме подготовки по отслеживанию отношения токов намагничивания холостого хода и текущего режима машины, отношения последнего к внутренней ЭДС.
Обеспечение в устройстве процес0 ° отслеживания и стабилизации по-
5
0
5
средством одноконтурных систем регулирования позволяет выбрать большие коэффициенты усиления регуляторов (блоков сравнения) и малые постоянные времени контуров, что снижает время и повьшгает качество регулирования. Это важно для реализации устройства, так как отслеживание тока ротора выполняется в разделенном времени двух режимов - подготовки и непосредственно регулирования. Время этих режимов задается таймерным устройством. При этом чем меньше времена регулирования в каждом из режимов, тем меньше могут быть заданы
0
времена пребывания в режимах подготовки и регулирования. Тем точнее и качественнее происходит отслеживание полного тока ротора, а следовательно, и моделирование располагаемых реактивного тока и мощности.
Моделирование располагаемого реактивного тока по условию допустимого тока статора путем разложения с фактического тока статорной обмотки на синусоидальные активную и реактивную составляющие, увеличения и суммирования последней с активной составляющей, исходя из условия непревышения этой суммой допустимого тока статора позволило заменить процедуру двухмерного поиска располагаемой реактивной мощности, свойственную известному способу, процессом однонаправленного изменения величины реактивной составляющей тока. В результате достигается величина располагаемого реактивного тока, которая умножается на фазное напряжение.
0
5
1713
чтобы получить располагаемую реактивную мощность.
Упрощение операцир достигается за счет использования в процессе моделирования не мощностей, а соответствующих им токов, что исключает сложные мультипликативные преобразования по переходам оттоков и напряжений к мощностям и наоборот.
Моделирование располагаемого реактивного тока по условию допустимого, тока ротора путем формирования полного тока ротора через ЭДС поперечной оси, благодаря учету нелинейности магнитной системы в реактансах взаимоиндукц1П1 через отношение тока намагничивания холостого хода при номинальном напряжении к току намагничивания текущего режима, а в коэффициенте взаимосвязи между ЭДС поперечной оси и полным током ротора через отношетше тока намагничивания к соответствующей ему внутренней ЭДС, позг оляет отказаться от характеристики КЗ, используемой для определения полного тока ротора .в известном сгюсобе, которая не может характеризовать рабочий режим нелинейной системы, какой является синхронная машина. В результате точность моделиров 1 1ия располагаемых реактивного тока и мощности повысилось.
Построение и внедрение данного устройства, являкицегося его основой, в операпивном диспетчерском управлении позволяет исключить или сократить затраты времени квалифицированных специалистов на расчеты и моделирование располагаемой реактивной мощности.
Формула изобретения
Способ моделирования располагаемой реактивной мощности турбогенера тора путем измерения фазного напря1649
0
5
0
5
0
5
0
5
жения статора, формирования внутренней ЭДС, определения с помощью нее и характеристики холостого хода тока намагничивания мащины, получения фактического активного и моделируемого реактивного тока статора, отличающийся тем. что, с целью упрощения и повышения точности, измеряют ток статора, разлагают его на фактические активный и реактивный токи, последний увеличивают, получая моделируемый реактивный ток, путем суммирования которого с фактическим активным током получают моделируемый полный ток статора, внутреннюю ЭДС определяют как сумму напряжений ста- торной обмотки и падения напряжения от полученного моделируемого полного тока статора на активном сопротивлении и сопротивлении рассеяния статор- ной обмотки, формируют ЭДС поперечной оси как сумму внутренней ЭДС и падения напряжения от моделируемого полного тока статора на сопротивг лении взаимной индукции, умноженного на отнощение тока намагничивания холостого хода при номинальном напряжении генератора к току намагничивания, соответствующему внутренней ЭДС, получают моделируемый ток ротора путем умножения тока намагничивания, соответствующего внутренней ЭДС, на отношение ЭДС поперечной оси к внутренней ЭДС, моделируемый ток ротора и моделируемый полный ток статора сравнивают с соответствующими допустимыми значениями, причем указанное увеличение моделируемого реактивного тока осуществляют до достижения либо моделируемым полным током статора, либо моделируемым током ротора допустимого значения,фиксируют при этом значение моделируе- мого реактивного тока статора и умножают его на измеренное напряжение статора.
ургт
фие.1
п5
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381648A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1987 |
|
SU1534477A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1985 |
|
SU1458880A1 |
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
Изобретение относится к области электротехники. Цель изобретения - упрощение и повышение точности.Для этого измеряют ток статора, разлагают его на фактические активный и реактивный токи. Последний увеличивают и суммируют с фактическим активным током, получая при этом моделируемый реактивный ток статора. Моделируемый ток ротора получают путем умножения тока намагничивания, соответствующего внутренней ЭДС на отношение ЭДС поперечной оси к внутренней ЭДС, Моделируемый ток ротора и моделируемый полный ток статора сравнивают с соответствующими допустимыми значениями, при этом указанное увеличение моделируемого реактивного тока осуществляют до достижения либо моделируемым полным током статора, либо моделируемым током ротора допустимого значения. При достижении указанными токами допустимого значения фиксируют значение моделируемого реактивного тока статора. Располагаемую реактивную мощность определяют в результате умножения фиксированного значения моделируемого реактивного тока статора на напряжение статора, 2 ил. § сл с
ГО
т
5х.
3/ - 4«
.
х..
3
/7
3
cfJusZ
| Усов С.В | |||
| Электрическая часть станций и энергия | |||
| Л,, 1 977 ,с.46-47, Маркович М,М, Режимы энергетических систем, М,: Энергия, 1969, с.265-266. |
