(21)3970572/24-07
(22)22.10.85
(46) 15.03.88. Бюл. № 10
(71)Томский политехнический институт им. С.М.Кирова
(72)А.В.Шмойлов
(53)621.313.322-81.001.57(088.8)
(56)Усов С.В. Электрическая часть станций. Л.: Энергия, 1977,с.А6-47.
Маркевич И.М. Режимы энергетических систем. М.: Энергия, 1969, с. 265-266.
(54)СПОСОБ МОДЕЛИРОВАНИЯ РАСПОЛАГАЕМОЙ РЕАКТИВНОЙ МОЩНОСТИ ТУРБОГЕНЕРАТОРА
(57)Изобретение относится к области электротехники. Пель изобретения - упрощение и повышение точности. Для этого измеряют фазное напряжение статора турбогенератора, формируют синусоидальный сигнал, модуль которого равен допустимому полному току статора. Этот сигнал расщепляют на ортогональные составляющие так, чтобы одна из них совпадала по фазе с фактическим активным током статора. Регулируют фазу синусоидального сигнала и при равенстве величин ортогональной составляющей и фактического активного тока получают полный моделируемый ток статора. Моделируемый ток ротора получают путем умножения тока намагничивания, соответствующего внутренней ЭДС, на отношение ЭЛС поперечной оси к внутренней ЭДС, Сравнивают моделируемый ток ротора с его допустимым значением и в случае превышения над последним уменьшают моделируемый полньпЧ ток статора до установления равенства моделируемого тока ротора с его допустимым значением. После установления указанного равенства фиксируют значение моделируемого реактивного тока статора. Располагаемую реактивную мощность получают в результате умножения зафиксированного значения моделируемого реактивного тока статора на напряжение статора. 2 ил.
(С
(Л
00 00
о: 4
00
Величина I
го реактивного тока Iр не является располагаемым реактивным током, так как ток ротора, соответствующий моделируемому току статора I , оказался больше своей допустимой величины
Это подчеркнуто также в верхнем ин-i-8i т Эс1 тЭс1 дексе в ооозначениях I , 1 , 1р .
Если бы ток ротора, соответствующий
Изобретение отислсится к электро- d)HepreTHKe, а именно к управлению режимами работы энергосистем и може быть использовано для непрерывного контроля располагаемой реактивной мощности неявнополюсных синхронных машин, как правило турбогенераторов
Цель изобретения - упрощение опе ,радий и повышение точности способа моделирования располагаемой реактивной мощности турбогенератора.
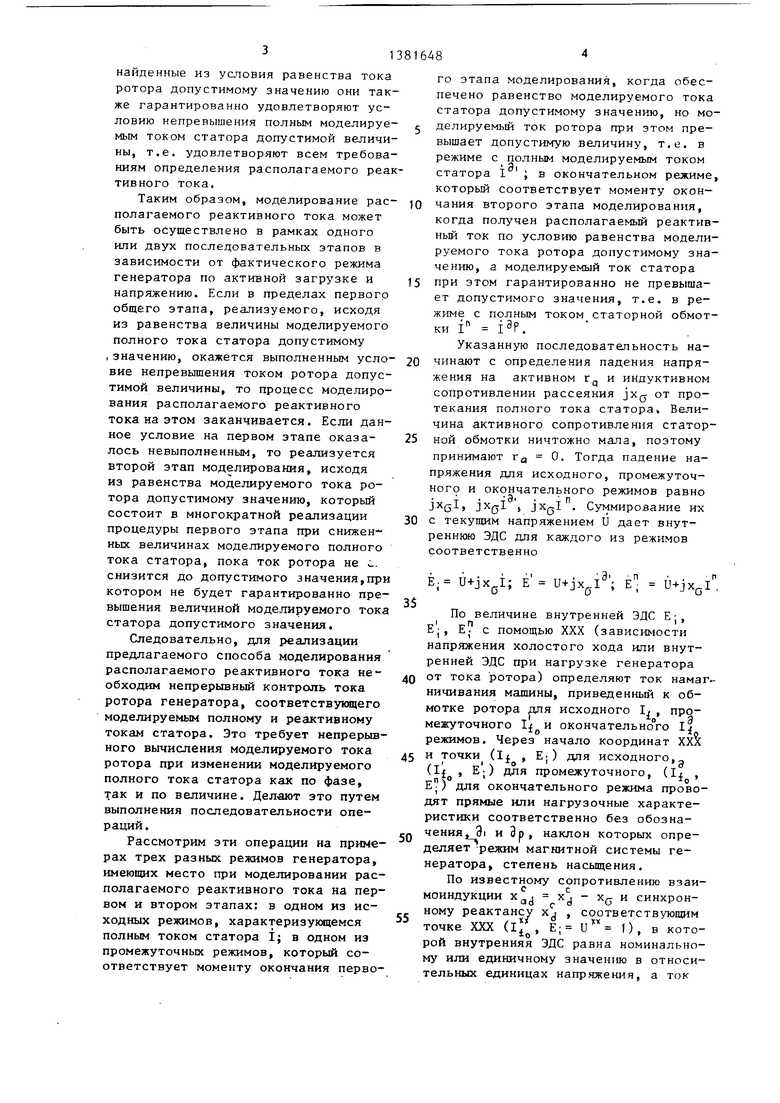
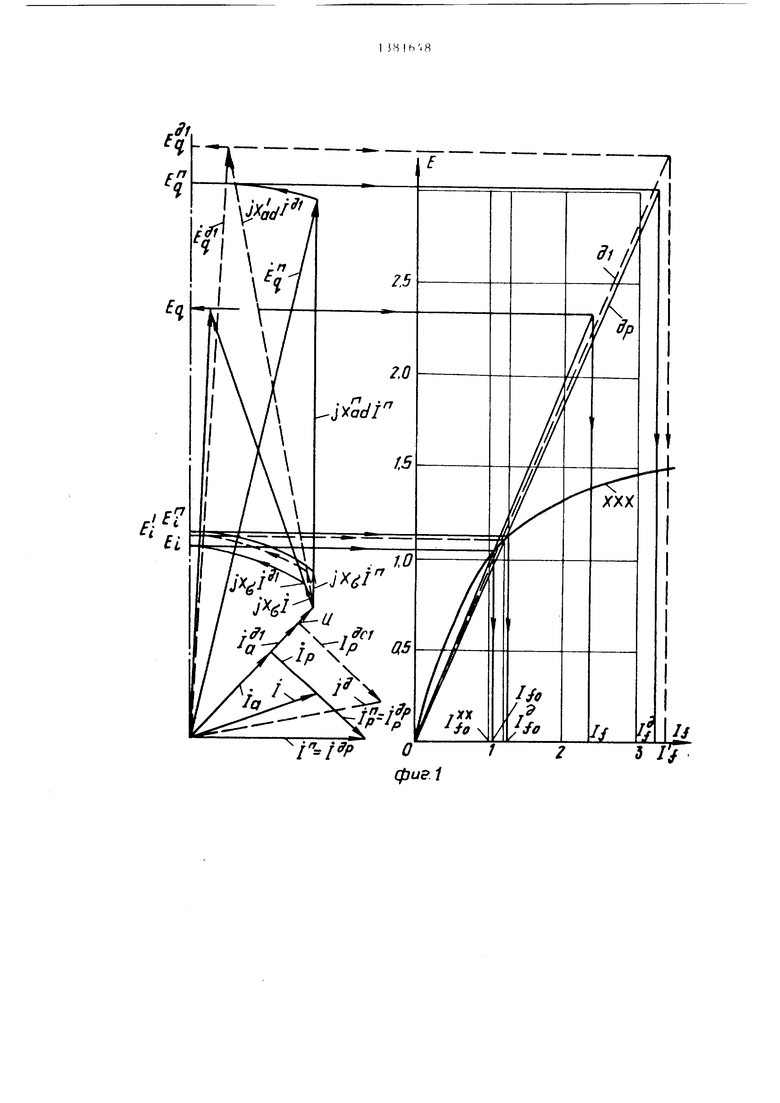
На фиг, 1 приведены векторные диаграммы формирования внутренней ЭДС, ЭДС поперечной оси, характеристика холостого хода (XXX) и использование их для определения тока ротора; на фиг, 2 - пример выполнения блок-схемы устройства, осуществляющего способ,
Способ состоит в том, что измеряют текущее фазное напряжение U и фактический полньп ток статорной обмотки I с активной 1д и реактив- Hoi i IQ составляющими. Формируют синусоидальный сигнал, модуль которого равен дoпycтимo fy полному току статора. Для этого расщепляют его на ортогональные составляющие так, чтобы одна из них совпала с вектором активного тока машины, а фазу регулируют из условия выравнивания величины этой ортогональной составляющей с величиной фактического ак- тинного тока.
Если измеренный ток статора такой, что активная его составляющая, совпадающая с вектором измеренного напряжения U, равна 1 , то после выравнивания с ее величиной ij величины ортогональной составляющей регулируемого по фазе синусоидального сигнала вектор последнего достигает положения, в котором он характери- зуется как моделируемый ток статора i , разложенный на фактический акти1зный и допустимый реактивный по условию допустимого
тока статора I ,
,.Эс
полученного допустим тЭс
5
5
0
5
0 5
О
0
5
моделируемому току статора, не превысил допустимое значение, то моделируемые полный и реактивный токи статора были бы располагаемыми по условию допустимого тока статора, а в обозначениях этих токов был бы исключен верхний индекс.
Так как величина IQ не является располагаемым реактивным током из-за превышения током ротора допустимой величины, необходимо уменьшение величины моделируемого тока статора 1 , дальнейшее регулирование его фазы и перераспределение ортогональных составляющих пока составляющая, совпадающая с вектором активного тока, не уравняется по величине с последним. Такую процедуру выполняют до тех пор, пока ток ротора, соответствующий уменьшенному моделируемому току статора, не снизится до своего допустимого значения. Полученная при этом реактивная составляющая уменьшенного моделируемого тока статора является допустимым реактивным током по условию допустимого тока ротора и одновременно располагаемым реактивнь1м током генератора, так как наряду с равенством тока ротора его допустимой величине обеспечено гарантированное непревышение полным моделируемым током статора своего допустимого значения. Для случая, когда фактический ток статора I имеет активную IQ и реактивную ip составляющие, а регулирование фазы-синусоидального сигнала с величиной допустимого тока статора (исходя из равенства величины ортогональной составляющей этого сигнала, совпадающей с вектором активного тока Ig, величине последнего) не позволяет получить непревышения током ротора допустимого значения и требует уменьшения величины регулируемого по фазе синусоидального сигнала, на фиг. 1 представлен вектор
уменьшенного указанного тока или моiapделируемого полного тока статора I
в момент снижения его до величины, при которой ток ротора аналогично снизился до допустимого значения.Моделируемый ток статора I Р для описанных условий и его ортогональная составляющая IpPявляются располагаемыми соответственно полным током статора I ным током
и располагаемым реактивг П
IP генератора, так как
найденные из условия равенства тока ротора допустимому значению они также гарантированно удовлетворяют условию непревышения полным моделируемым током статора допустимой величины, т.е. удовлетворяют всем требованиям определения располагаемого реативного тока,
Таким образом, моделирование располагаемого реактивного тока может быть осуществлено в рамках одного или двух последовательных этапов в зависимости от фактического режима генератора по активной загрузке и напряжению. Если в пределах первого общего этапа, реализуемого, исходя из равенства величины моделируемого полного тока статора допустимому I значению, окажется выполненным условие непревышения током ротора допустимой величины, то процесс моделирования располагаемого реактивного тока на этом заканчивается. Если данное условие на первом этапе оказалось невыполненным, то реализуется второй этап моделирования, исходя из равенства моделируемого тока ротора допустимому значению, который состоит в многократной реализации процедуры первого этапа при сниженных величинах моделируемого полного тока статора, пока ток ротора не с. снизится до допустимого значения,при котором не будет гарантированно превышения величиной моделируемого тока статора допустимого значения.
Следовательно, для реализации предлагаемого способа моделирования располагаемого реактивного тока не обходим непрерывный контроль тока ротора генератора, соответствукицего моделируемым полному и реактивному токам статора. Это требует непрерывного вычисления моделируемого тока ротора при изменении моделируемого полного тока статора как по фазе, так и по величине. Делают это путем выполнения последовательности операций.
Рассмотрим эти операции на примерах трех разных режимов генератора, имеющих место при моделировании располагаемого реактивного тока на первом и втором этапах: в одном из исходных режимов, характеризующемся полным током статора I; в одном из промежуточньк режимов, который соответствует моменту окончания перво5
го этапа моделирования, когда обеспечено равенство моделируемого тока статора допустимому значению, но мо- 5 делируемый ток ротора при этом превышает допустимую величину, т.е. в режиме с полным моделируемым током статора I ; в окончательном режиме, который соответствует моменту окон-
0 чания второго этапа моделирования, когда получен располагаемый реактивный ток по условию равенства моделируемого тока ротора допустимому значению, а моделируемый ток статора
5 при этом гарантированно не превышает допустимого значения, т.е. в режиме с полным током статорной обмотки i i3p.
Указанную последовательность на- 0 чинают с определения падения напряжения на активном г и индуктивном сопротивлении рассеяния jx от протекания полного тока статора. Величина активного сопротивления статор- 5 ной обмотки ничтожно мала, поэтому принимают Гд 0. Тогда падение напряжения для исходного, промежуточного и окончательного режимов равно jxjjl, jx(jl , . Суммирование их 0 с текущим напряжением U дает внутреннюю ЭДС для каждого из режимов соответственно
Ё; Е Е
По величине внутренней ЭДС EJ, EJ, Е. с помощью XXX (зависимости напряжения холостого хода или внутренней ЭДС при нагрузке генератора 0 от тока ротора) определяют ток намагничивания машины, приведенный к обмотке ротора для исходного 1, промежуточного 1 и окончательно°го Ij
режимов. Через начало координат ХХХ
5 и точки (. Е; ) для исходного,,. (If , Е;) для промежуточного, (Ij , Е) для окончательного режима проводят прямые или нагрузочные характеристики соответственно без обозначения 9| и Эр, наклон которых определяет режим магнитной системы генератора, степень насыщения.
По известному сопротивлению взаимоиндукции Хд1 Xj - Х0 и синхронному реактансу Xj , соответствующим точке XXX (, Е; 1), в которой внутренняя ЭДС равна номинальному или единичному значеншо в относительных единицах напряжения, а ток
намагничивания - току ротора при холостом ходе генератора, и кратности отличия тока намагничивания соответствующего режима от тока холостого хода находят сопротивление взаимоиндукции машины в данном режиме:

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381649A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1987 |
|
SU1534477A1 |
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1985 |
|
SU1458880A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Устройство для управления асинхронной машиной с фазным ротором | 1982 |
|
SU1032581A1 |
. )(
ad
X .
ad
Определяют падение напряжения от протекания моделируемого тока статора по сопротивлению взаимоиндукции соответственно в исходном, промежуточном и окончательном режимах:
Е Е; + JX
-а. ..
Qjli Е( - Е;
ЕЯ Е +
Эр определяют ток ротора l в исходно
l , промежуточном и 1 окончательном 20 -
По модулю ЭДС поперечной оси каждого режима EQ, EQ , EQ с помощью
нагрузочной характеристики соответст- режимах. Последние мо гут быть вычис- вующего режима: без обозначения, 9i , лены также по формулам
Еi :i-.
ОЕ .
Полученный ток ротора находится в однозначной, однако нелинейной и неявной зависимости от моделируемых реактивного и полного тока статора, фактического активного тока и теку- п(его напряжения статорной обмотки. Использование в предложенном способе операции опреде пения тока ротора . по нагрузочной характеристике обеспечивает простоту и точность.Наклон прямой нагрузочной характеристики однозначно связан с характеристикой холостого хода, а следовательно, с текущим режимом генератора. Это позволяет с помощью линейных операций учесть изменение сопротивления взаимоиндукции при насыщении магнитной системы простыми и однотипными с операциями определения внутренней ЭДС и тока намагничивания действиями получить ток ротора. Ток намагничивания находят в последовательности определяют падение }1апряжения от полного тока статора на активном сопротивлении и сопротивлении рассеяния статорной обмотки. Это падение напряжения суммируют с текущим напряжением, что дает внутреннюю ЭДС, по величине которой с помощью XXX получают ток намагничивания. Ток ротора в предложенном способе после учета изменения сопротивления взаимоиндукIl
. „ ..c io
I ad
10
ad 3
- V
. Данное падение напряжения суммируют с внутренней ЭДС, в результате получают дпя каждого из режимов ЭДС поперечной оси
.
JX , I
- gd
Эр определяют ток ротора l в исходном,
l , промежуточном и 1 окончательном 20 -
режимах. Последние мо гут быть вычис- лены также по формулам
Ix
3 Ч
5
0
ции из-за насьпцения магнитной системы получают в аналогичной последова0 тельности: определяют падение напряжения от полного тока статора на сопротивлении взаимоиндукции, это падение суммируют с внутренней ЭДС, что дает ЭДС поперечной оси, по величине которой с помощью нагрузочной характеристики находят ток ротора. При этом все операции по определению тока .в роторе являются линейными.
Способ регулирования фазы и снижения величины полного моделируемого тока статора осуществляется в два этапа - регулирование фазы этого тока при неизменной величине, равной
с допустимому значению тока статорй, и сравнение получающегося при этом тока ротора с допустимым значением и, если последний превышает допустимое значение, переход ко второму этапу многократного повторения процедуры первого этапа при непрерывном снижении величины моделируемого тока статора, пока соответствующий ему ток ротора не снизится до допустимого значения. Оба этапа выполняют по одной и той же процедуре регулирования фазы моделируемого тока статора исходя из выравнивания величины ортогональной составляющей моделируемого
0
5
10
чувствительного выпрямителя 26 (ФВЗ) через выпрямитель 28 (В2) и фильтр 35 (Ф5) с одним из входов блока 1А умножения (МУ). Выход трансформатора тока через преобразователь 3 (ПТ) соединен с другим входом фазочувст- вительного выпрямителя 24 (ФВ1), выход которого через фильтр 31 (Ф1) подключен к одному из входов блока 16 сравнения (БС1). Другой вход последнего через фильтр 35 (Ф2) соедине с выходом фазочувствительного выпрямителя 25 (ФВ2), а выход с одним
15 из входов фазового модулятора 7 (ФМ) выход которого подключен к одному (функциональному) из входов управляемого усилителя 11 (УУ2), выход ко торого присоединен к другим входам
20 фазочувствительньгх выпрямителей 25 (ФВ2) и 26 (ФВЗ), через преобразователь 6 (ГГС2) - к другому входу сум п- pyюIIteгo усилителя В (СУ1), через преобразователь 5 (IIC1) и ключ 42 - 1-. другом, (функциональному) входу управляемого усилителя 12 (УУЗ) Выход управляемого усилителя 10 (УУ1) соединен с другим (управляющим) входом фазового модулятора 7 (ФМ), через выпрямитель 27 (В1) и фильтр 34 (Ф4) - с одним из входом блока 17 сравнения (БС2), другой вход которо- г о соединен с источником 38 заданного сигнала (ДС), а выход - с управ- тгяющим входом управляемого усилителя 10 (УУ1). Выход фазочувствительного выпрямителя 26 (ФВЗ) через фильтр 33 (ФЗ) подсоединен к другому входу блока 14 умножения (МУ), выход которого является выходом устройства. Выход суммирующего усилителя 8 (Gyi) присоединен к одному из входов суммирующего усилителя 9 (СУ2), а через выпрямитель 29 (ВЗ)
25
тока статора, совпадающей с вектором фактического тока, и величины послед- него причем первый этап, как более простой, не требующий снижения величины моделируемого тока статора по сравнению с допустимым значением,
когда соответствующий моделируемому току статора ток ротора не превышает допустимого значения, позволяет получить располагаемьй реактивный ток, не переходя ко второму более сложному этапу. Усложнение второго этапа состоит в необходимости снижения величины моделируемого тока статора исходя из снижения соответствующего ему тока ротора до допустимого значения. В остальном операции второго этапа те же самые, что и на первом этапе.
Предложенный способ характеризу- ется простотой, однотипностью и линейностью операций, чем достигатся повьпнение точности моделирования располагаемого реактивного тока.
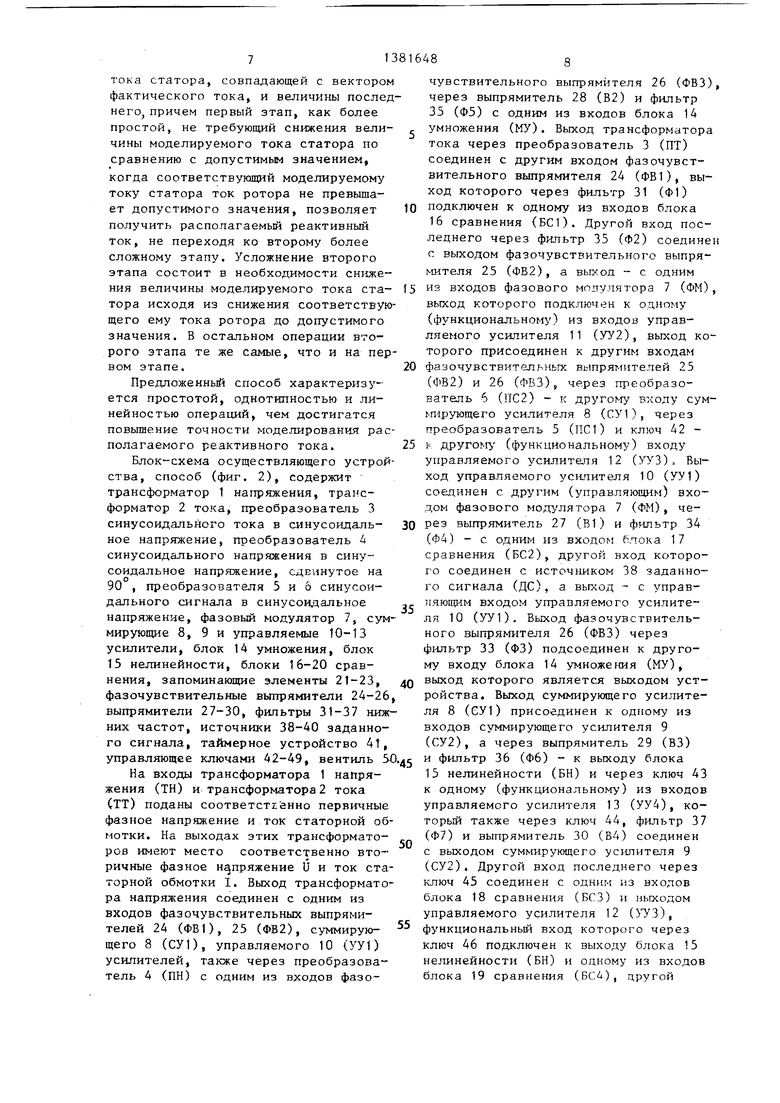
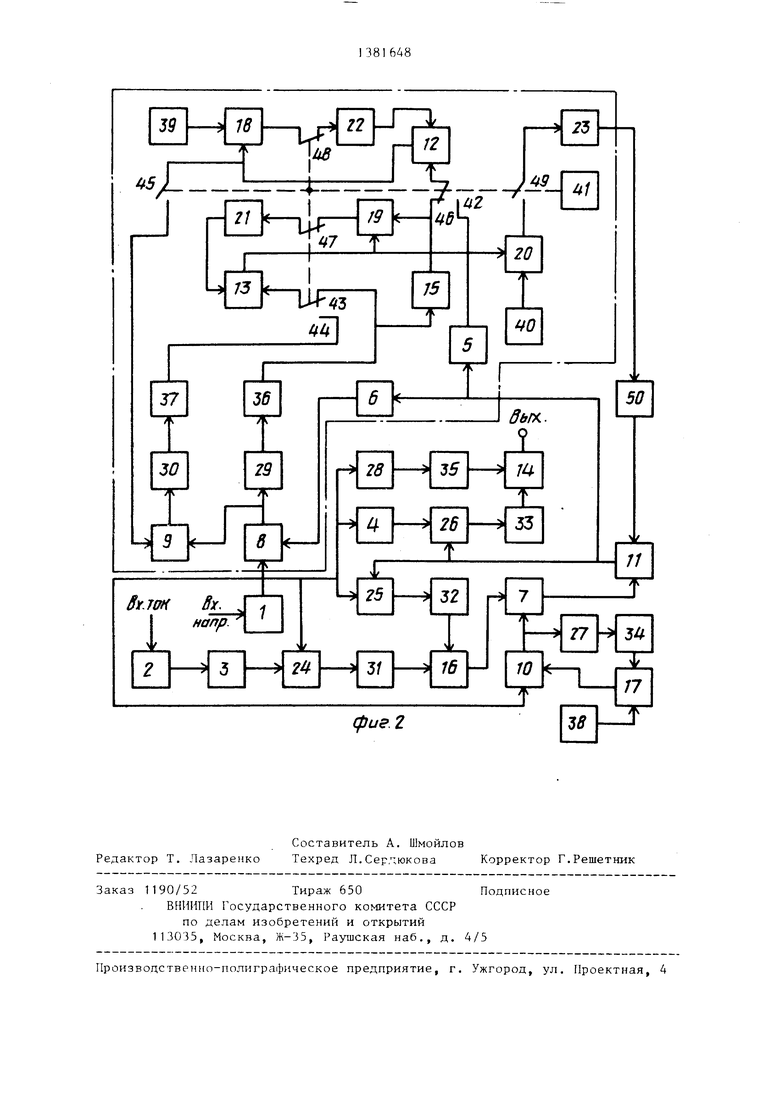
Блок-схема осуществляющего устройства, способ (фиг. 2), содержит трансформатор 1 напряжения, трансформатор 2 тока, преобразователь 3 синусоидального тока в синусоидальное напряжение, преобразователь 4 синусоидального напряжения в синусоидальное напряжение, сдвинутое на 90 , преобразователя 5 и & синусоидального сигнала в синусоидальное напряжение, фазовьй модулятор 7, суммирующие 8, 9 и управляемые 10-13 усилители, блок 14 умножения, блок 15 нелинейности, блоки 16-20 сравнения, запоминающие элементы 21-23, дО фазочувствительные выпрямители 24-26, выпрямители 27-30, фильтры 31-37 нижних частот, источники 38-40 заданного сигнала, таймерное устройство 4t, управляющее ключами 42-49, вентиль 50.д5 фильтр 36 (Фб) - к выходу блока
На входы трансформатора 1 напря- 15 нелинейности (БН) и через ключ 43 жения (ТН) и трансформатора2 тока (ТТ) поданы соответственно первичные фазное напряжение и ток статорной обмотки. На выходах этих трансформато- ров имеют место соответственно вторичные фазное напряжение U и ток статорной обмотки I. Выход трансформатора напряжения соединен с одним из
30
35
к одному (функциональному) из входов управляемого усилителя 13 (УУ4), который также через ключ 44, фильтр 37 (Ф7) и выпрямитель 30 (В4) соединен с выходом суммирующего усилителя 9 (СУ2). Другой вход последнего через ключ 45 соединен с одним нз входов блока 18 сравнения (БСЗ) и выходом управляемого усилителя 12 (ТЗ), функциональный вход которого через ключ 46 подключен к выходу блока 15 не:шнейности (БН) и одному из входов блока 19 сравнения (БС4), другой
входов фазочувствительных выпрямителей 24 (ФВ1), 25 (ФВ2), суммирующего 8 (СУ1), управляемого 10 (УУ1) усилителей, также через преобразователь 4 (ПН) с одним из входов фазо0
чувствительного выпрямителя 26 (ФВЗ), через выпрямитель 28 (В2) и фильтр 35 (Ф5) с одним из входов блока 1А умножения (МУ). Выход трансформатора тока через преобразователь 3 (ПТ) соединен с другим входом фазочувст- вительного выпрямителя 24 (ФВ1), выход которого через фильтр 31 (Ф1) подключен к одному из входов блока 16 сравнения (БС1). Другой вход последнего через фильтр 35 (Ф2) соединен с выходом фазочувствительного выпрямителя 25 (ФВ2), а выход с одним
5 из входов фазового модулятора 7 (ФМ), выход которого подключен к одному (функциональному) из входов управляемого усилителя 11 (УУ2), выход которого присоединен к другим входам
0 фазочувствительньгх выпрямителей 25 (ФВ2) и 26 (ФВЗ), через преобразователь 6 (ГГС2) - к другому входу сум- п- pyюIIteгo усилителя В (СУ1), через преобразователь 5 (IIC1) и ключ 42 - 1-. другом, (функциональному) входу управляемого усилителя 12 (УУЗ) Выход управляемого усилителя 10 (УУ1) соединен с другим (управляющим) входом фазового модулятора 7 (ФМ), через выпрямитель 27 (В1) и фильтр 34 (Ф4) - с одним из входом блока 17 сравнения (БС2), другой вход которо- г о соединен с источником 38 заданного сигнала (ДС), а выход - с управ- тгяющим входом управляемого усилителя 10 (УУ1). Выход фазочувствительного выпрямителя 26 (ФВЗ) через фильтр 33 (ФЗ) подсоединен к другому входу блока 14 умножения (МУ), выход которого является выходом устройства. Выход суммирующего усилителя 8 (Gyi) присоединен к одному из входов суммирующего усилителя 9 (СУ2), а через выпрямитель 29 (ВЗ)
5
О 5 фильтр 36 (Фб) - к выходу блока
0
5
15 нелинейности (БН) и через ключ 43
5
к одному (функциональному) из входов управляемого усилителя 13 (УУ4), который также через ключ 44, фильтр 37 (Ф7) и выпрямитель 30 (В4) соединен с выходом суммирующего усилителя 9 (СУ2). Другой вход последнего через ключ 45 соединен с одним нз входов блока 18 сравнения (БСЗ) и выходом управляемого усилителя 12 (ТЗ), функциональный вход которого через ключ 46 подключен к выходу блока 15 не:шнейности (БН) и одному из входов блока 19 сравнения (БС4), другой
вход которого соединен с выходом управляемого усилителя 13 (УУ4) и одним из входов блока 20 сравнения (БС5), а выход через ключ 47 и запоминающий элемент 21 (ЗЭ1) - с управляющим входом управляемого усилителя 13 (УУ4). Другой вход блока 20 сравнения (БС5) подсоединен к источнику 40 заданного сигнала (ДР), а выход через ключ 49, запоминающий элемент 23 (ЗЭЗ) и вентиль 50 (ВТ) - к другому (управляющему) входу управляемого усилителя 11 (УУ2). Другой вход блока 18 сравнения (БСЗ) соединен с источником заданного сигнала 39 (НХ) а выход через ключ 43 и запоминающий элемент 22 (ЗЭ2) с управляющим входом управляемого усилителя 12 (УУЗ)
Устройство, осуществлякяцее предложенный способ, работает следующим образом.
Для получения синусоидального сигнала, величина которого равна допустимому току статора 1 в устройстве предусмотрен контур регули- рованпя, состоящий из управляемого усилителя 10 (УУ1), блока 17 сравнения (БС2)5 выпрямителя, 27 (В1) и фильтра 34 (Ф4). На функциональньй вход усилителя 10 (УУ1) подано фазное напряжение U с выхода трансформатора напряжения. Выходной сигнал усилителя 10 (УУ1) U проходит выпрямитель 27 (В) и фильтр 34 (Ф4) и преобразуется в сигнал постоянного тока и . Последний поступает на один из входов блока 17 сравнения (БС2), на другой вход которого подается с источника 38 заданного сигнала (ДС) непзменньш сигнал постоянного тока I . На выходе 17 (БС2) образуется рассогласование U - I , которое подается на управляющий вход управляемого усилителя 10 (УУ1), и изменяет его коэффициент передачи. Благодаря этому рассогласование U - I снижается и в пределе стремится к нулю,
Я
при этом и I . Следовательно, независимо от величины фазного напряжения и на выходе управляемого усилителя будет синусоидалззньм сигнал и, величина которого всегда равна
fS
и . 1
то то
1 , I.e.
Сигнал I подается на функцио- нальнь й вход фазового модулятора 7 (ФМ), на управляющий вход которого поступает сигнал с выхода блока 16 сравнения (БС1). Вследствие этого
фаза сигнала на выходе фазового модулятора 7 (ФМ) меняется. Этот сигнал поступает на функциональный вход управляемого усилителя 11 (УУ2), на выходе которого имеет место синусоидальный сигнал с той же фазой, но может быть изменен по величине за счет рассогласования между моделируемым током ротора 1 и его допустимым значением I,, т.е. 1/ - 1;, поданного на управляющий вход этого усилителя и изменяющего его коэффициент передачи. Выходной синусоидальный сигнал управляемого усилителя является полньм моделируемым током статора I , соответствующим величине I sincp моделируемого реактивного тока. Чтобы этот ток достиг величины и фазы, соответствующих вели
5
0
чине располагаемого реактивного тока IP Ip I sincf по условию допустимого тока статора действует контур регулирования его фазы cf , исходя из условияу ср. Этот контур выполнен на основе блока 16 сравнения (БС1) и фазового модулятора 7 (ФМ). Чтобы ток i достиг величины и фазы, соответствующих величине располагав l3P
Р
мого реактивного тока 1
т Эр ЭРР
I sinoi по условию допустимого тока ротора совместно работают два контура регулирования: указанный контур которьш отрабатывает фазу ср тока 1, 5 исходя из условия , и другой контур на основе обобщенного формирователя рассогласования Ii- I, полного тока ротора относительно допустимой величины (фиг. 2, обведен штрихпунктирной линией) и управляемого усилителя 11 (УУ2), отслеживающий величину I , исходя из условия l I I, где I - величина тока ста0
тора 1°, соответствующая допустимому току ротора . . Режим работы контуров регулирования обеспечен за счет вентиля 50 (ВТ). Вентиль закрыт при рассогласовании 1 - 1 - О, вследствие чего работает только контур на основе 16 (БС1) и 7 (ФМ). Наоборот при l - I р О вентиль открь1т и наряду с контуром 16 (БС1) и 7 (ФМ), действует контур на основе обобщенного формирователя, вырабатывающего
г fт9
рассогласование 1 - Ij. и управляемого усилителя 11 (УУ2). Открытый вентиль 50 (ВТ) в этом случае пропускает положительное рассогласование
i, j. на управляющий вход уснпите- ля 11 (УУ2).
Контур на основе блока 16 сравнения (БС1) и фазового модулятора 7 (ФМ) включает также фазочувствитель- ный выпрямитель 25 (ФВ2), фильтр 32 нижних частот (Ф2), управляемый усилитель 11 (УУ2). Работа его происхостремясь к нулю
В результате на выля ( ется либо сигнал I I I
ходе управляемого усилителя образутП тд, тЗс
соответствующий величине оасполагаеп -гЭг Р Р 1 - со5Ц I cosi при отслежи иаг5с
НИИ последнего по условию допустимого тока статора (I - О, вентиль
дат следующим образом. Синусоидальный ю 50 (ВТ) закрыт, либо сигнал l сигнал полного тока статора I с выхода управляемого усилителя 11 (УУ2)
,9р
поступает на один из входов фазочув- ствительного выпрямителя 25 (ФВ2), на другой вход которого подано поляризующее фазное напряжение U. На выходе выпрямителя вырабатывается сигнал, среднее значение которого равно l j где - угол между векторами и и I. Среднее значение I формируется с помощью фильтра 32 (Ф2). Сигнал постоянного тока I costf подан на второй вход блока 16 сравнения (БС1), на первом входе которого имеет место аналогичный сигнал постоянного тока, представляющий величину I cos if активной составляющей фактического полного тока статора I. В результате на выходе блока сравнения образуется рассогласование
Icosci - Icoscf, которое воздействует на управляклций вход фазового модуля- тора 7 ((t), на функциональный вход которого подан синусоидальньш сигнал i . На выходе фазового модулятора 7 (ФМ) имеет место синусоидальный сигнал I , который однако имеет другую фазу . Сигнал подан на функциональный вход управляемого усилителя 11 (УУ2). Если вентиль 50 (ФТ) в цепи сравнения этого усилителя закрыт, т.е. l , - 1 О, то на эыходе 11 (УУ2) будет тот же сигнал с фазой q) . Если вентиль 50 (ВТ) открыт (l . - l| 0), то коэффициент передачи 11 (УУ2) снижается за счет воздействия рассогласования 1 - If на управляющий вход усилителя 11 (УУ2) и на его выходе имеет место сигнал i с фазой Cf , т.е. с фазой сигнала I на функциональном входе
II(УУ2). Таким образом, на выходе
I if , соответствующий величине располагаемого реактивного тока l lj I PCOSCP P, при отслежива р - .р . . coscp НИИ его по условию допустимого тока
5 ротора (1 - 1 0, вентиль 50 (ВТ) открыт),Контур на основе обобщенного формирователя рассогласования I, - 1г (фиг, 2, обведен штрихпунк- тирной линией) и управляемого усили20 теля 11 (УУ2) содержит также вентиль 50 (ВТ), который подключает выработанное рассогласование 1 - 1. на управляющий вход 11 (УУ2), если 1, - I, 0, и разрывает цепь управ25 ления усилителя 1 1 (УУ2) при I.j - у
l -i О. При открытом вентиле (ll - I 0) контур действует, обеспечи
30
обеспечивая
снижение рассогласования 1, - Ijj , устремляя его к нулю. При закрытом вентиле (l , - 1г -О) контур не действует .
-f
35
40
Полученный на выходе управляемого усилителя 11 (УУ2) синусоидальный сигнал i I I , являющийся полным током статорной обмотки по условию допустимого тока статора (l - Г 0), или I l , являющийся полным током статорной обмотки по условию допустимого тока ротора (1 - . 0), подается на один из входов фазочувствительного выпрямителя 26 (ФВЗ), на другой вход которого подано поляризующее напряду жение -JU с выхода преобразователя 4 (ПН), т.е. фазное напряжение, сдвинутое на 90 в сторону отставания. В результате на выходе выпрямителя образуется сигнал, среднее значение ,„ которого после фильтра 33 (ФЗ) будет ° I ,/соз,при.
11 (УУ2). Таким образом, на выходе i - i° О и Ip I блока 16 сравнения (БС1) имеет мес- I - 1° 0. т.е. рас
3l 1 ± 1 П
: . тэр
I г coscfi при
оЭр,
то рассогласование I costp - Icoscp при закрытом вентиле 50 (ВТ) или If - I О и l cosq - Icostp при открытом вентиле или 1 -
55
- Ч
0.
Указанное рассогласование за счет функционирования контура снижается,
, J..J - W, I.e. располагаемьш реактивный ток 1р. Этот сигнал поступает на другой вход блока 14 умножения (МУ), на первый вход которого подан сигнал и. В результате на выходе блока умножения имеется сигнал располагаемой реактивной мощности Q UIp .
16Д8
стремясь к нулю
12
В результате на выля ( ется либо сигнал I I I
ходе управляемого усилителя образутП тд, тЗс
совеличине оасполагаеп -гЭг Р Р cosi при отслежи иа
50 (ВТ) закрыт, либо сигнал l
,9р
I if , соответствующий величине располагаемого реактивного тока l lj I PCOSCP P, при отслежива р - .р . . coscp НИИ его по условию допустимого тока
ротора (1 - 1 0, вентиль 50 (ВТ) открыт),Контур на основе обобщенного формирователя рассогласования I, - 1г (фиг, 2, обведен штрихпунк- тирной линией) и управляемого усилителя 11 (УУ2) содержит также вентиль 50 (ВТ), который подключает выработанное рассогласование 1 - 1. на управляющий вход 11 (УУ2), если 1, - I, 0, и разрывает цепь управления усилителя 1 1 (УУ2) при I.j - у
l -i О. При открытом вентиле (ll - I 0) контур действует, обеспечи
обеспечивая
снижение рассогласования 1, - Ijj , устремляя его к нулю. При закрытом вентиле (l , - 1г -О) контур не действует .
-f
Полученный на выходе управляемого усилителя 11 (УУ2) синусоидальный сигнал i I I , являющийся полным током статорной обмотки по условию допустимого тока статора (l - Г 0), или I l , являющийся полным током статорной обмотки по условию допустимого тока ротора (1 - . 0), подается на один из входов фазочувствительного выпрямителя 26 (ФВЗ), на другой вход которого подано поляризующее напряжение -JU с выхода преобразователя 4 (ПН), т.е. фазное напряжение, сдвинутое на 90 в сторону отставания. В результате на выходе выпрямителя образуется сигнал, среднее значение которого после фильтра 33 (ФЗ) будет I ,/соз,при.
i - i° О и Ip I I - 1° 0. т.е. рас
: . тэр
I г coscfi при
оЭр,
i - i° О и Ip I I - 1° 0. т.е. рас
± 1 П
55
, J..J - W, I.e. располагаемьш реактивный ток 1р. Этот сигнал поступает на другой вход блока 14 умножения (МУ), на первый вход которого подан сигнал и. В результате на выходе блока умножения имеется сигнал располагаемой реактивной мощности Q UIp .
131381648
Оставшуюся часть схемы, обведенную штрихпунктирной линией на фиг.2, можно назвать обобщенным формирователем, вырабатьшающим рассогласование l4 - 1г , который вместе с вентилем 50 (ВТЗ и управляемым усилителем 11 (УУ2) образует контур моделирования располагаемого полного тока статора, а следовательно, и распола- д
гаемого реактивного тока по условию допустимого тока ротора, т.е. l. Ip
Данный обобщенный формирователь можно подразделить на ряд контуров, работающих в разделенном времени двух режимов, которые могут быть определены соответственно как режим подготовки и режим регулированил.,Время существования структур этих режимов определяет таймерное устройство 41 (т), которое управляет ключами 42-49. В положении ключей, показанном ка фиг, 2, имеет место режим подготовки, в противоположном положении - режим регулирования.
Рассмотрим работу обобщенного формирователя в режиме подготовки, на- эмачеинем которого является отработка двух от.ошений: тока намагничивания холостого хода
току намагничивания
уу . I
моделируемого режиьш I : /Ij. и /
педнего тока к BUvrpeHHeii ЭДС I, /Е..
IQ 1
JroNiy служат сос)тзетс1 венно два контура регу;н1ровання: контур отработки i; /ij; на осчо:-е управляемого уси- Л1ггеля 12 (УУЗ) и блока 18 сравнения (Без) и контур отработки отношения 1 /Е на оснстве управляемого усили- геля 13 (УУ4) и блока 19 сравнения (БС4).
Для функ1цюнирования контура отработки отношения формируется внутренняя ЭДС: на вход преобразователя 6 ()
мого усилителя 1
с выхода управляе- (УУ2) поступает
моде.чируемыи синусоидальный полный ток статорной обмотки I , на выходе данного преобразователя формируется сигнал (Гд + jX(j)i , который суммируется с фазньм напряжением U на суммирующем усилителе 8 (СУ1), на выходе которого образуется внутренняя ЭДС 6; и -ь (гд + jx,j)l . Синусоидальный сигнал внутренней ЭДС, пройдя через выпрямитель 29 (ВЗ) и фильтр 36 (Ф6) нижних частот, преобразуется в сигнал постоянного тока Е . , подаваемый на вход блока 15 нелинейности (БН). На выходе послед
, 5
0
14
него, моделирующего характеристику холостого хода генератора, образуется
сигнал тока намагничивания I, . Он
о
через ключ 46 поступает на функциональный вход управляемого усилителя 12 (УУЗ), выходной сигнал которого 1 подается на один из входов блока 18 сравнения (БСЗ), на другой вход которого поступает сигнал с источника 39 заданного сигнала (НХ), равный по величине току намагничивания холостого хода 1 . На выходе блока 18 (БСЗ) образуется рассогласование хЦ - I, которре через ключ 48 и за поминающий элемент 22 (ЗЭ2) воздей- ствует на управляющий вход усилителя 12 (УУЗ). В результате организуется контур регулирования из блоков 12 (УУЗ) и 18 (БСЗ), который отрабатывает рассогласование, устремляя его к нулю, т.е. 1 - l - О или I, I. . Это обусловливает коэффиIQ О
циент передачи управляемого усилителя, равный It /If I, /IP . Благо-.
-to io to -o
даря запоминающему элементу 22 (ЗЭ2) отработанный коэффициент передачи сохраняется в течение режима регулирования.
Контур отработки отношения использует сигналы внутренней ЭДС Е и соответствующего ей тока намаг5
0
0
5
ничивания Ij
:
имеющих место на входе и выходе блока 15 нелинейности (БН). Этот контур образован управляемым усилителем 13 (УУ4), блоком 19 сравнения (БС4), ключом 47 и запоминающим, элементом 21 (ЗЭ1). На функциональный вход управляемого усилителя 13 (УУ4) через ключ 43 подается сигнал внутренней ЭДС Ej с входа блока нелинейности. На выходе зтого усилителя образуется сигнал Е, которьй поступает на один 5 из входов блока 19 сравнения (БС 4), на другом входе которого присутствует сигнал тока намагничивания 1 с ,
IQ
Iвыхода блока нелинейности. В ррзуль- тате на входе блока 19 (БС4) образуется рассогласование Е. - 1 ,
торое через ключ 47 и запоминающий элемент 21 (ЗЭ1) поступает на управляющий вход усилителя 13 (УУЗ). Таким образом, имеет место замкнутьй контур регулирования, отрабатьшаю- щий названное рассогласование, устремляя его к нулю, т.е. Е; - I, . Вследствие этого коэффициент передачи усилителя 13 (УУ4) становится рдв
ным Е , /Е, If /Е . Согласно фиг.1
l /Е с4 -- , где К , - нелиней- io Е К 1
ный коэффициент взаимосвязи ЭДС по-
1-1т
перечной оси Е„ с током ротора I, .
Запоминающий элемент 21 (ЗЭ1) обеспечивает сохранение коэффициента передачи Кг усилителя 13 (УУ4) в режиме регулирования.
Режим и структура регулирования формируются с помощью таймерного устройства 41 (Т), которое переводит ключи 42-49 в противоположное поло- жение. В этом режиме сигнал модели руемого полного тока статора I , проходя преобразователь 5 (ПС2), на его выходе преобразуется в напряжение jx ji , которое через ключ 42 пода- ется на функциональньш вход управляемого усилителя 12 (УУЗ), на выходе которого преобразуется в сигнал Этот сигнал через ключ 45 поступает на один из входов суммирующего усилителя 9 (СУ2), на другой вход которого подан сигнал внутренней ЭДС Ё .. Тогда на выходе этого усилителя формируется ЭДС поперечной оси Е Е; -V jx gj Сигнал EQ, пройдя через выпрямитель 30 (В4) и фильтр нижних частот 37 (Ф7), преобразуется в сигнал постоянного тока ЕО, который через ключ 44 подан на функциональный вход управляемого усилителя 13 (УУ4). На выходе этого усилителя будет сигнал полного тока ротора, т.е. I, (l| /Е| )Е О К,ЕО , этот сигнал подан на один из входов блока 20 сравнения (БС5), а на другой вход - сигнал допустимого значения тока 1 с выхода источника 40 заданного сигнала (ДР). На выходе блока сравнения образуется рассогласование l , - 1 , которое через ключ 49 и запоминающий элемент 23 (ЗЭЗ) поступает на вход вентиля 50 (ВТ). В режиме подготовки запоминающий элемент 23 (ЗЭЗ) хранит рассогласование If - I, , которо при 1 - . О участвует в обработке коэффициента передачи управляемого усилителя 11 (УУ2) по условию допус- 1ТИМОГО тока ротора.
Таким образом, схема устройства представляет собой многоконтурную систему автоматического регулирования, однако работа контуров происходит практически независимо друг
с
-
0
5 0 5 0
0
от друга. Взаимосвязь контуров обусловлена только использованием в одних контурах регулирования выходных сигналов других контуров регулирования, что не сказывается на параметрах самих контуров и показателях качества процесса регулирования, т.е. все процессы стабилизации и отслеживания в устройстве осуществляются одноконтурными системами регулирования, например контурами отслеживания активной составляющей фактического тока статора, контурами отслеживания полного тока статора и полного тока ротора исходя из допустимых значений, вспомогательными контурами в режиме подготовки по отслеживанию отношения токов намагничивания холостого хода и текущего режима генератора, отношения последнего к внутренней ЭДС, контуром стабилизации допустимой величины полного тока статора.
Обеспечение в устройстве процессов отслеживания и стабилизации посредством одноконтурных систем регулирования позволяет выбрать большие коэффициенты усиления регуляторов (блоков сравнения) и малые постоянные времени контуров, что снижает время и повышает качество регулирования. Это важно для построения устройства, так как отслеживание тока ротора выполняется в разделенном времени двух режимов - подготовки и непосредственно регулирования. При этом чем меньше времена регулирования в каждом из режимов, тем меньше могут быть заданы времена пребывания в режимах подготовки и регулирования, тем точнее и качественнее происходит отслеживание полного тока ротора, а следовательно, и моделирование располагаемых реактивного тока и мощности.
Моделирование располагаемого реактивного тока путем регулирования фазы и разложения синусоидального сигнала на ортогональные составляющие, одна из которых совпадает по углу с активным током, позволяет заменить процедуру двухмерного поиска располагаемой реактивной мощности, свойственную известному способу, процессом указанного разложения с ут.еньше- нием или без уменьшения разлагаемого синусогщального сигнала. В результате достигается величина располагаемого реактивного тока по условию допустимых значений либо тока статора, которая умножается на фазное напряжение, чтобы получить располагаемую реактивную мощность.
Упрощение операций в предложенном способе достигается за счет использования в процессе моделирования не мощностей, а соответствующих им то- ков, что исключает сложные множитель- но-делительные операции при переходах от мощностей к токам и наоборот и сокращает процессы отслеживания.
Моделирование располагаемого реак- тическим активным током, регулируют
тканого тока по условию допустимого тока ротора путем формирования полного тока ротора через ЭДС поперечной оси, благодаря учету нелинейности магнитной системы в реактансе взаимоиндукции через отношение тока намагничивания холостого хода при номинальном напряжении к току намагничивания текущего режима, а в коэффифазу синусоидального сигнала, добиваясь равенства, величин указанной его ортогональной составляющей и фактического активного тока, в ре- 20 зультате получают полный моделируемый ток статора, разложенный на фак тический активный и допустимый реактивный токи по условию допустимого тока статора, внутреннюю ЭДС опредециенте взаимосвязи между ЭДС попереч- 25 ляют как сумму напряжений статорной .
ной оси и током ротора через отношение тока намагничивания к соответствующей ему внутренней ЭДС, позволяет отказаться от характеристики КЗ, используемой для определения полного Toica ротора в известном способе, которая не может характеризовать рабочий режим нелинейной системы, какой является синхронная машина. В результате точность моделирования располагаемого реактивного тока и мощности повысилась.
Построение и внедрение данного устройства и способа, являющегося его основой, в оперативном диспетчерском управлении позволяет исключить или сократить затраты времени квалифицированного персонала на расчеты и моделирование располагаемой реактивной мощности.
Формула изобретения
Способ моделирования располагаемой реактивной мощности турбогенератора путем измерения фазного напряжения статора, формирования внутренней ЭДС, определения с помощью нее и характеристики холостого хода тока намагничивания машины, получения фактического активного и моделируемого реактивного токов статора, отличающийся тем, что, с целью упрощения и повышения точности, формируют синусоидальный сигнал, модуль которого равен допустимому полному току статора, расщепляют его на ортогональные составляющие так, чтобы одна из них совпадала по фазе с факфазу синусоидального сигнала, добиваясь равенства, величин указанной его ортогональной составляющей и фактического активного тока, в ре- зультате получают полный моделируемый ток статора, разложенный на фактический активный и допустимый реактивный токи по условию допустимого тока статора, внутреннюю ЭДС опреде0
5
0
5
0
обмотки и падения напряжения от полученного моделируемого полного тока статора на активном сопротивлении и сопротивлении рассеяния статорной мотки, формируют ЭДС поперечной оси как сумму внутренней ЭДС и падения напряжения от моделируемого полного тока статора на сопротивлении взаимной индукции, умноженному на отношение тока намагничивания холостого хода при номинальном напряжении генератора к току намагничивания, соот- ветствующек1у внутренней ЭДС, получают моделируемый ток ротора путем умножения тока намагничивания, соответствующего внутр.енней ЭДС, на отношение ЭДС поперечной оси к внутренней ЭДС, моделируемый ток ротора сравнивают с его допустимым значением и в случае превьшения над последним уменьшают моделируемый полный ток статора до установления равенства моделируемого тока ротора с его допустимым значением, фиксируют при этом значения моделируемого реактивного тока статора и умножают его на измеренное напряжение статора.
3 I f
