1
Изобретение относится к управлению стационарными объектами и может найти широкое применение при проектировании и испытаниях различных систем и объектов.
Известно устройство для идентификации линейных объектов, содержащее сумматоры, блоки умножения, деления и блоки памяти Q.
Недостатком этого устройства является низкая точность идентификации при действии помех.
Наиболее близким по технической сущности к предлагаемому устройству является устройство, содержащее первый блок памяти, последовательно соединенные первый блок оперативной памяти, первый блок умножения, первый сумматор, первый блок деления, второй блок умножения, второй сумматор, второй блок оперативной памяти, третий блок умножения, третий сумматор и четвертый блок умножения, второй
вход которого соединен с вторым входом третьего блока умножения и с первым входом первого блока умножения, третий вход - с выходом первого блока деления, а выход - с вторым входом второго сумматора, третий вход которого соединен с выходом второго блока оперативной памяти и с вторым входом второго блока умножения, рой выход первого блока оперативной памяти подключен к второму входу третьего сумматора, а первый и второй входы - соответственно к входу и выходу объекта, выход первого блоt5 ка памяти соединен с третьим входом второго блока умножения, с вторым входом первого сумматора 2 .
Известное устройство проводит 20 идентификацию по формуле
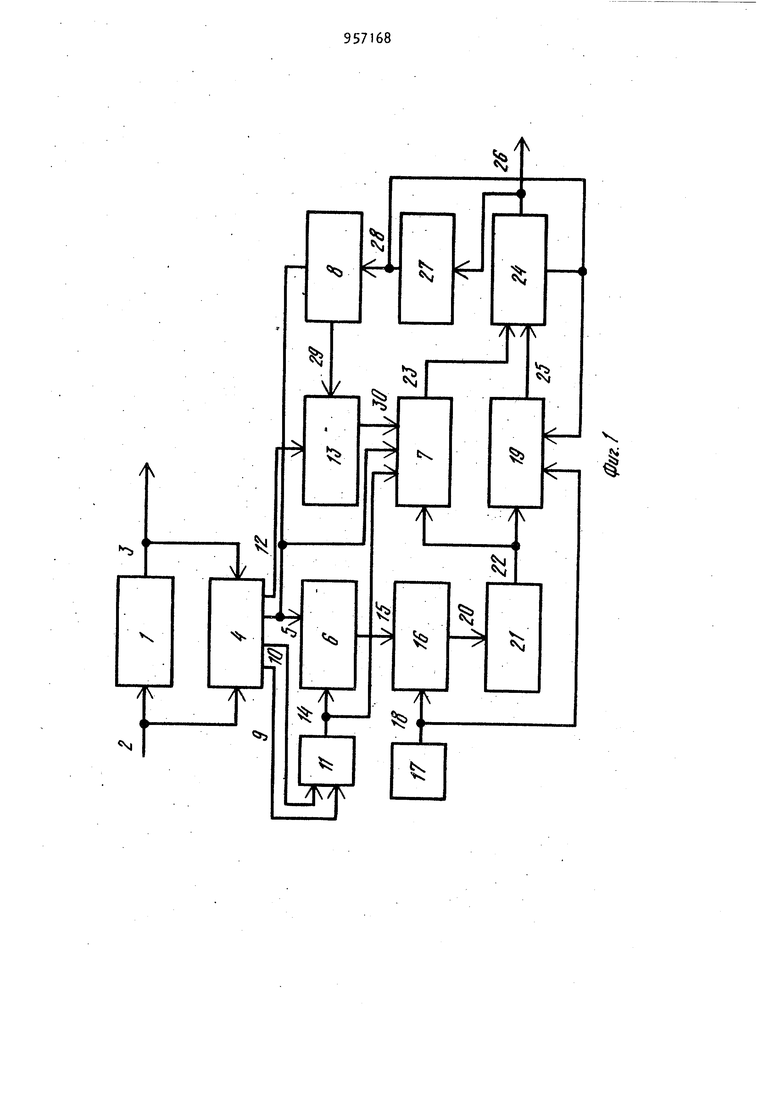
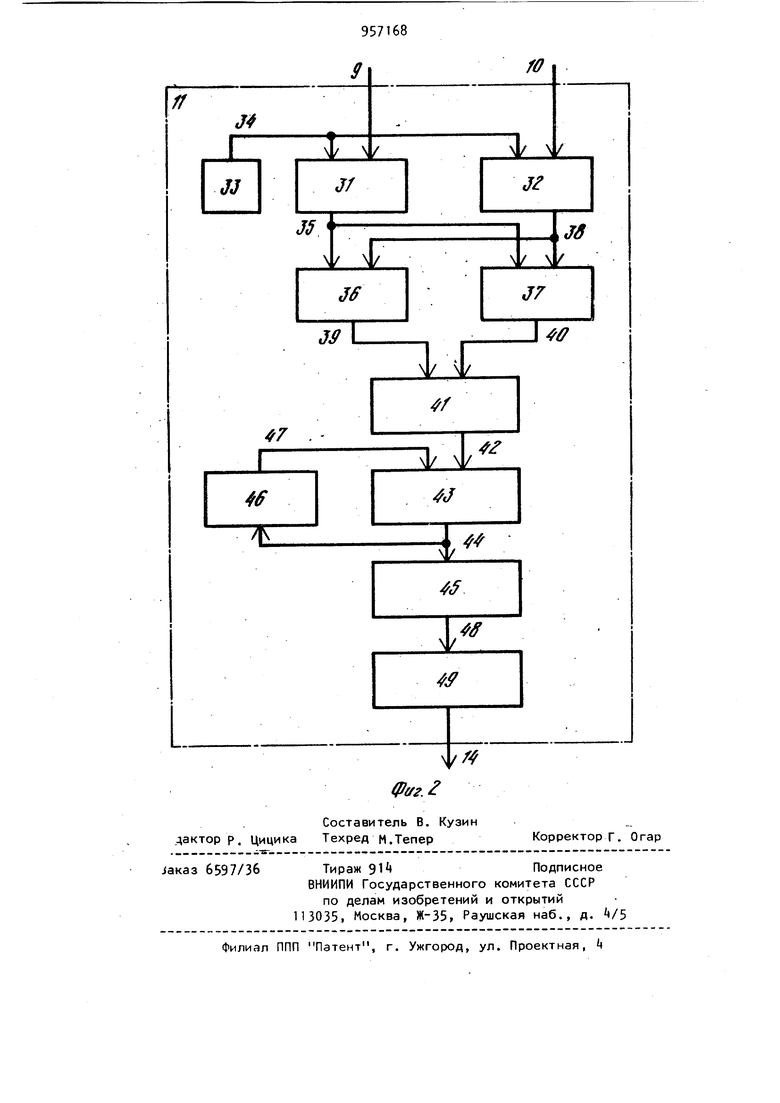
x(k-H) x(k)-y(k-H)R-J(k) -t-bif()F(k+l)Q- y(k+l) - F(k+l)x(k), где x(k) - оценка вектора идентифицируемых параметров объекта на k-M шаге; обратная априорная диспер.„сионная матрица вектора идентифицируемых параметров объекта; обратная дисперсионная матрица вектора помех измерений;F(k) - матрица размера (р-п), формируемая из значений входных и выходных сигналов объекта идентификации согласно формуле F(k)y(k),y(k-1),...,y(k-n,-1); U(k-l),U(k-2),...,U(k-na), -значение входного сигнала -значение выходного сигнала;-некоторая числовая последовательность. Его недостатком является то, что дисперсионная матрица вектора помех измерений задается постоянной для вс го интервала наблюдений. Однако в большинстве практических случаев характеристики помех измерений на интервале наблюдений меняются весьма значительно. Поэтому погрешность зад ния дисперсионной матрицы вектора по мех измерений ухудшает точность иден тификации и может привести к смещенным оценкам идентифицируемых парамет ров объекта. Цель изобретения - повышение точности идентификации. Поставленная цель достигается тем что устройство содержит второй блок памяти, третий блок оперативной памяти , пятый и шестой блоки умножения четвертый и пятый сумматоры и послед вательно соединенные седьмой блок ум ножения, шестой cyMMajop, второй бло деления и четвертый блок оперативной памяти, выход которого подключен к второмувходу первого блока умножения и к четвертому входу четвертого блока умножения, выход шестого сумматора через третий блок оперативной памяти соединен с вторым своим входом, выходы пятого и шестого блоков умножения подключены соответственно к первым и вторым входам четвертого и пятого сумматоров, выходы которых соединены соответственно с первым и вторым входами седьмого блока умноже ния, первые входы пятого и шестого 6noKOFi умножения подключены соответенно к третьему и четвертому выам первого блока оперативной памяа вторые - к выходу второго блопамяти. Это позволяет на каждом шаге оцеания осуществлять уточнение диспернной матрицы вектора помех измеий и отслеживать изменение статисеских характеристик вектора помех ерений по мере поступления инфории и учитывать эти изменения в цессе идентификации. За счет этодостигается повышение точности нки идентифицируемых параметров екта. Устройство осуществляет оценку ентифицируемых параметров объекта формуле i((k)cif(k+1)Rox(k) + + (k+1)F4k+l)Q (k+l)y(k+l) - F{k+l)x{k), е (k+l) - обратная дисперсионная матрица вектора помех измерений на k+1 шаге оценивания; V(k+l) - некоторая числовая последовательность , вычисляемая по формуле (k+1)Q-4k+l)F(k+l)ll Известно, что дисперсия помехи по олному объему выборки может быть выислена по формуле . де Q - дисперсионная матрица вектора помех измерений; г-я конечная разность вектора измерений; порядок конечной разности; число точек съема информации в полном объеме выборки. Предполагая характеристики помех измерений неизменными только на некотором ограниченном интервале наблюдений и вводя обозначение Р-; av (-1) -(2т+1)(2г)У(г-) получим рекуррентное соотношение Q(k+l)Q(k)H-..( + y ik-m-fj) . 595 В предлагаемом устройстве реализуется операция вычисления дисперсионной матрицы вектора помех измерений по результатам измерений, которая используется при определении убывающей числовой последовательности алгоритма идентификации. Таким образом, устройство идентификации корректирует свои параметры в соответствии с уровнем помех в канале измерения выходного процесса объекта идентификации. Это позволяет считать предлагаемое устройство адаптивным. На фиг. 1 приведена функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока расчета дисперсии. Вход и выход объекта идентификации 1 соответственно шинами 2 и 3 соединены с первым блоком оперативно памяти t. Первый блок оперативной па мяти k шиной 5 соединен первым, четвертым и третьим с блоками умножения 6-8, шинами 9 и 10 с блоком расчета дисперсии 11 и шиной 12 с треть им сумматором 13. Блок (засчета диспе сии 11 шиной И соединен с первым и четвертым блоками умножения 6 и 7. Первый блок умножения 6 шиной .15 сое динен с первым, сумматором 1б. Первый блок памяти 17 шиной 18 соединен с первым сумматором 16 и вторым блоком умножения 19. Первый сумматор 16 шиной 20 соединен с первым блоком деления 21, который шиной 22 соединен с четвертым и вторым блоками умножен1 я 7 и 19. Четвертый блок умножения 7 шиной 23 соединен с вторым сумматором 2, а второй блок умножения 19 шиной 25 соединен с вычитающим входом второго сумматора . Вто рой сумматор 2 шиной 2б соединен с вторым блоком оперативной памяти 27, одновременно шина 2б является выходом устройства идентификации. Второй блок оперативной памяти 27 шиной 28 соединен с третьим и вторым блоками умножения 8 и 19 и вторым сумма тором 2k. Третий блок умножения 8 ши ной 29 соединен с вычитающим входом третьего сумматора 13, который шиной 30соединен с четвертым блоком умножения 7. Шины 9 и 10 соединяют соответственно пятый и шестой блоки умножения 31и 32 с первым блоком оперативной памяти А. Второй блок памяти 33 шиной З соединен с пятым и шестым бло ;ками умножения 31 и 32. Пятый блок множения 31 шиной 35 соединен с етвертым и пятым сумматорами 36 и 37 естой блок умножений 32 шиной 3° оединен с вторым входом четвертого умматора Зб и вычитающим входом пяого сумматора 37- Четвертый и пятый умматоры 36 и 37 соответственно шиами 39 и ku соединены с седьмым блоом умножения 1, который шиной .2 соединен с шестым сумматором 43. Шестой сумматор 3 шиной t соединен с вторым блоком деления 45 и третьим блоком оперативной памяти 6. Третий блок оперативной памяти 46 шиной 47 соединен с шестым сумматором 3. Второй блок деления 45 шиной 8 соединен с четвертым блоком оперативной памяти 49, который шиной соединен с первым и четвертым блоками умножения 6 и 7. Устройство работает следующим образом. Во второй блок памяти 33 записываются предварительно рассчитанные по данным о величине интервала сглаживания m и порядке конечной разности г коэффициенты, aj согласно формулы/ г ((2m4l)(2r)J J (r-j) j 0,1 ,... , г, В третий блок оперативной памяти ч6 записывается априорная дисперсионная матрица вектора помех измерений Q. Сигналы с входа и выхода объекта идентификации 1 по шинам 2 и 3 записываются в регистры первого блока оперативной памяти 4. Как только в первом блоке памяти k будет накоплено (1+г+т) значение входных и выходных сигналов, устройство начинает оценивать идентифицируемые параметры объекта, т.е. оценивание осуществляется с запаздыванием на (1+г+т) тактов. Сформированная в первом блоке оперативной памяти 4 матрица F(k+l) по шине 5 поступает в блоки умножения 6-8. Кроме того, значения выходных сигналов y(k+m+j+l) по шине 9 и y(k-m+j) по шине 10 из соответствующих регистров первого блока оперативной памяти 4 поступают в блок расчета дисперсии 11 на пятый и .шестой блоки умножения 31 и 32. Из второго блока памяти 33 по шине З в -блоки умно.жения 31 и 32 поступают значения коэффициентов aj. Блоки умножения 31 и 32 формируют произведения oj-y(k+m + +J + 1) И a:.y(k-m+j). Значение a.yi,k -fm+j + 1) из блока умножения 31 по шине 35 поступает на суммирующие входы сумматоров 36 и 37. Значение аj-y(k-m+j) из блока умножения 32 по шине 38 поступает на второй суммирующий вход сумматора 36, где формируется значение 21 а; ry(k+m+j + 1 )+у (k-m+j), г-0 и вычитающий вход сумматора 37 где формируется значение . aJГy(k+m+j T jгO - y(k-m+j)J . Полученные значения из сумматоров 36 и 37 по шинам 39 и kO поступают в блок умножения , где формируется их произведение. Получен ное произведение из блока умножения 1 по шине k2 поступает в сумматор k3 Сюда же из блока оперативной памяти 6 по шине 7 подается значение априорной дисперсионной матрицы вектора помех измерений Q. Сумматор 3 формирует значение дисперсионнойгматрицы вектора помех измерений Q(k+1), которое по шине 44 подается в блок оперативной памяти 46 и записывается вместо априорных данных для использования на следующем шаге вычисления дисперсионной матрицы. Значение матрицы (l(k+1) по шине 44 подается также в блок деления 45. Так как диспер сионная матрица имеет диагональный вид, то для получения обратной дисперсионной матрицы необходимо и достаточно диагональные элементы мат-рицы заменить их обратными значениями. Сформированнная в блоке деления 45 обратная дисперсионная матрица вектора помех измерений по шине 48 з писывается в блок оперативной памяти 49. Значение обратной матрицы ) из блока оперативной памяти 49 по шине 14 подается на блоки умножения 6 и 7. Блок умножения 6 форj мирует произведение ) (k + +l)F(k+l), которое по шине 15 поступает на сумматор 16.. Из блока памяти 17 по шине 18 значения априорной дис персионнои матрицы вектора идентифицируемых параметров объекта R поступают на сумматор 16 и блок умножения 13. Сумматор 1Ь формирует норму матрицы llRo+F()Q.Чk+)F(kf + OIL равную сумме модулей всех эле ментов матрицы. Полученная норма мат рицы из сумматора 16 по шине 20 поступает в блок деления 21, где формируется значение y(k+l), равное (и RV+F (k+1 )(l-(k+1 )F(k+1 ). Значение y(k+1) по шине 22 поступает в блоки умножения 7 и 19. В блок умножения 13 по шине 28 из блока оперативной памяти 27 поступает значение оценки параметров объекта идентификации x(k), вычисленное на предыдущем такте. Таким образом, в блоке умножений 19 вычисляется значение y(k+1)R x(k), которое по шине 25 поступает на вычитающий вход сумматора 24. С блока оперативной памяти 27 значение оценки x(k) по шине 28 подается в блок умножения 8, где формируется значение F(k+1)x(k). Это значение по шине 23 поступает на вычитающий вход сумматора 13, на суммирующий вход 4 оторого по шине 12 из блока оперативной памяти 4 подаются значения выходного сигнала y(k+l). И сумматор 13 формирует значение y(k+l)-F(k+1 ) x(k) , которое по шине 30 подается в блок умножения 7. Блок умножения 7 формирует значение )F(k+l)Q- (k+1). y(k+1)-F(k + + 1)x(k) , которое по шине 23 подается на суммирующий вход сумматора 24, на второй суммирующий вход сумматора 24 по шине 28 подается значение оценки x(k) из блока оперативной памяти 27. Таким образом, сумматор 24 формирует значение вектора оценки идентифицируемых параметров объекта, равное на k+1 шаге J(k+1)x(k)-if(k+1)RVx(k) + +X(k+1)F;(k-l-1)(-(k+1) у(k+1) - F(k+l)x(k). В отличие от известного предлагаемое устройство позволяет на каждом шаге оценивать статистические характеристики помех измерений и тем самым исключить методические ошибки оценивания, связанные с неточностью задания априорной дисперсионной матрицы вектора помех измерений. Кроме этого, исключается возможность получения смещенных оценок идентифицируемых параметров объекта из-за неточного задания дисперсионной матрицы вектора помех измерений. Поэтому можно считать, что оценки параметров идентифицируемого объекта, полученные с помощью предлагаемого устройства являются более точными, чем оценки, полученные с помощью известного устройства. Формула изобретения Адаптивное устройство для иденти(|1икации линейных объектов, содержащее первый блок памяти, последовательно соединенные первый блок опера тивной памяти, первый блок умножения первый сумматор, первый блок деления второй блок умножения, второй сумматор, второй блок оперативной памяти, третий блок умножения, третий .сумматор и четвертый блок умножения, Второй вход которого соединен с вторым входом третьего блока умножения и с первым входом первого блока умножения, трети и вход - с выходом первого блока деления, а выход - с вторым входом второго сумматора, третий вход которого соединен с выходом вто 1ЭОГО блока оперативной памяти и с вторым входом второго блока умножения, второй выход первого блока оперативной памяти подключен к второму входу третьего сумматора, а первый и второй входы - соответственно к входу и выходу объекта, выход первого блока памяти соединен с третьим входом второго блока умножения, с вторым входом первого сумматора, 6 т ли чающееся тем, что, с целью повышения точности устройства, оно содержит второй блок памяти. 810 третий блок оперативной памяти, пятый и шестой блоки умножения, четвертый и пятый сумматоры и последовательно соединенные седьмой блок умножения, шестой сумматор, второй блок деления и четвертый блок оперативной памяти, выход которого подключен к второму входу первого блока умножения и к четвертому входу четвертого блока умножения , выход шестого сумматора через третий блок оперативной памяти соединен с вторым своим входом, выходы пятого и шестого блоков умножения подключены соответственно к первым и-вторым входам четвертого и пятого сумматоров, выходы которых соединены соответственно с первым и вторым входами седьмого блока умножения , первые входы пятого и шестого блоков умножения подключены соответственно к третьему и четвертому выходам первого блока оперативной памяти, а вторые - к выходу второго блока памяти . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке If 2600599/18-2, кл. G 05 В 13/02, 1978. 2.Авторское свидетельство СССР по заявке Vf 288 8 1/18-2 4, кл. G 05 В 13/02, 1980 (прототип).
J/
JJ
J5
/
W
Ф ф
J/
J8
f
J7
ff
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное устройство для идентификации линейных объектов | 1988 |
|
SU1520478A1 |
| Идентификатор параметров стохастического динамического объекта | 1984 |
|
SU1255991A1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
| НЕЙРОПРОЦЕССОР, УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ НАСЫЩЕНИЯ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И СУММАТОР | 1998 |
|
RU2131145C1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| Устройство для адаптивной идентификации объекта | 1985 |
|
SU1305633A2 |
| Устройство для решения систем дифференциальных уравнений | 1977 |
|
SU714406A1 |