йи и подъема поддонов термических печей содержит раму 11 с ползунами 14 и 5, перемещаемыми по вертикаль- iJBjiM направляющим 2, расположенным в Корпусе 1, приводом 13, Вал 9, несу Й1ИЙ консольную платформу 10, установлен в подшипниковых опорах 12, На валу закреплен кривошип 18 с чет- зертым ползуном 17, Вал соединен с рычажным приводом поворотаs который выполнен в виде двухзвенного рычажного механизма 19, стойки 20, кривошипа 21 и качающегося гидроцилинд ра 22, через вал 23, несущий жестко связанную с ним перпендикулярную направляющую 24 под ползун 17. Под- доны 4 извлекаются из печи за цапфы 8 с помощью штанг 5, имеющих по- воротные собачки 7, установленные на осях щтанг и образующие в конце движения поддона из печи с жесткими опорами 3 корпуса гнезда под цапфы.4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU900093A1 |
| Устройство для съема и установки дверей | 1990 |
|
SU1816788A1 |
| Аппарат для закупорки и шуровки шлаковой летки доменной печи | 1935 |
|
SU48394A1 |
| Полуприцеп-контейнеровоз | 1989 |
|
SU1782807A1 |
| Автоматическая линия для химико-термической обработки длинномерных деталей | 1989 |
|
SU1710588A1 |
| Кантователь | 1973 |
|
SU524652A1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МИННЫЙ ЗАГРАДИТЕЛЬ | 1995 |
|
RU2092772C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к средствам автоматизации транспортно-разгрузочных операций в термических печах. Целью кзоб- . ретения является повышение производительности. Устройство для разгруз(Л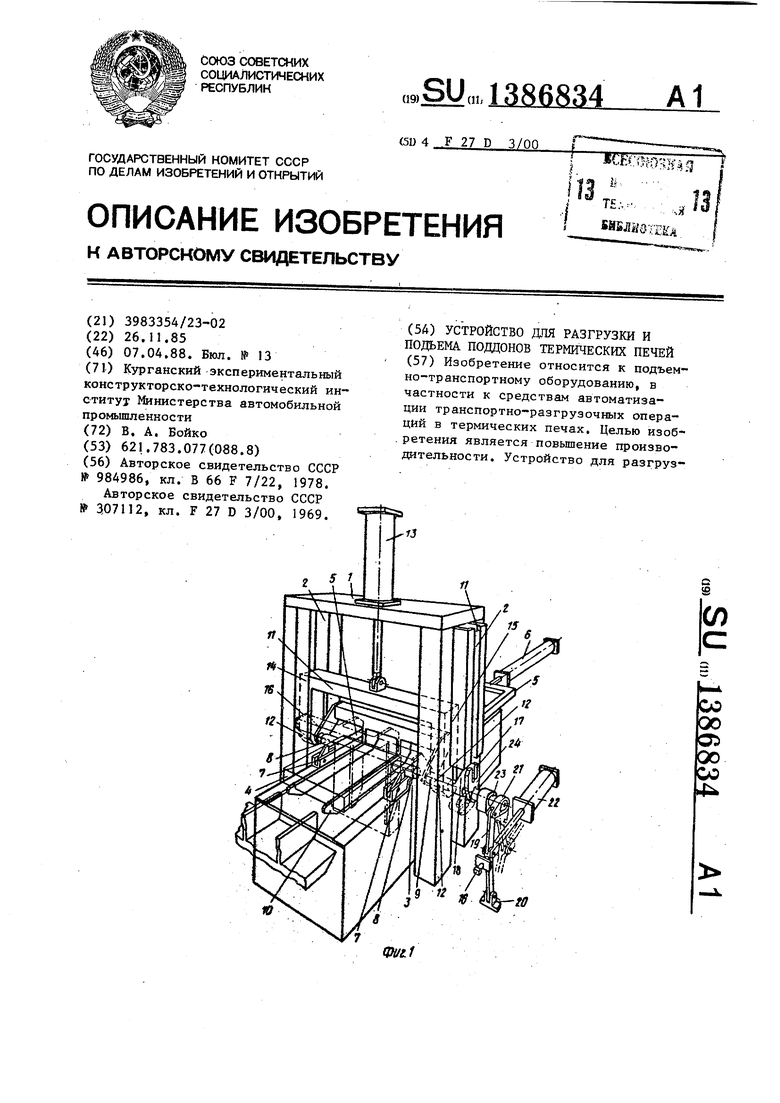
1
Изобретение относится к подъемно-транспортному оборудованию, в частности к средствам автоматизации транспортно-разгрузочных операций в термических печах.
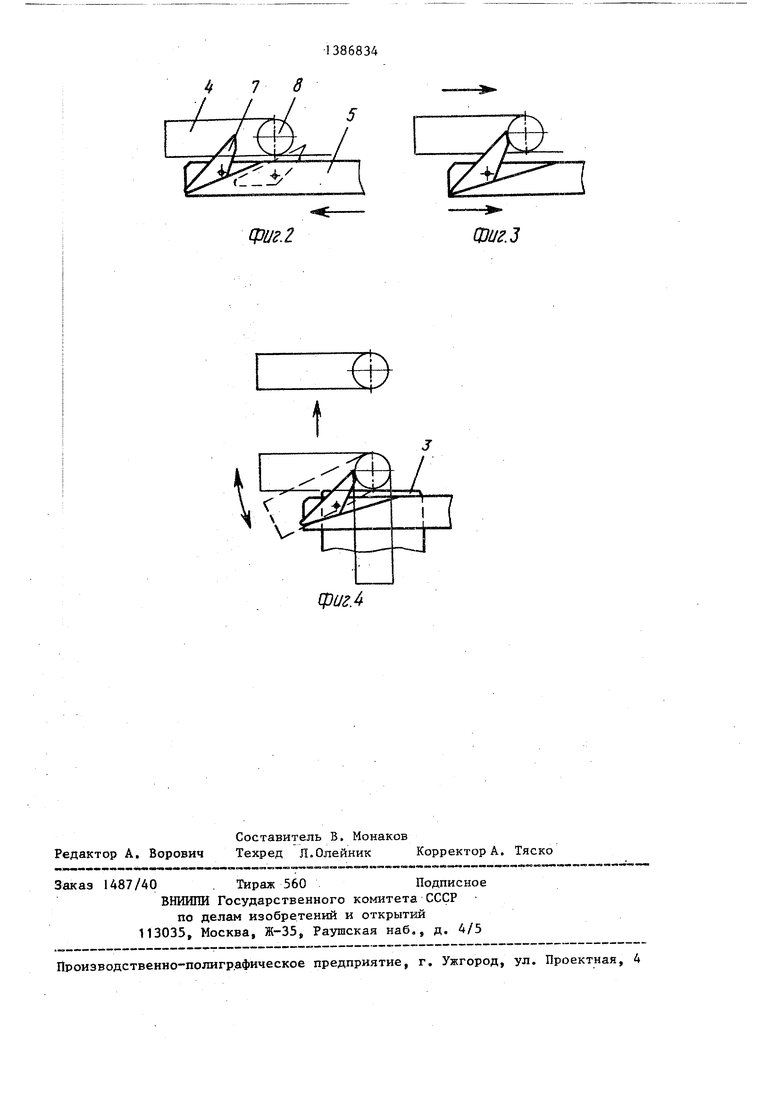
Целью изобретения является повы- шение производительности, На фиг. 1 изображено устройство, общий вид; на фиг. 2 - положение поддона в момент захвата его цапф собачками механизма продольного перемещения; на фиг. 3 - то же, в момент транспортировки из печи; на фиг. 4 - момент образования гнезд опор с собачками после остановки механизма продольного перемещения поддонов .
Устройство для разгрузки и подъема поддонов термических печей содержит корпус I с вертикальными направляющими 2 и жесткими опорами 3, механизм продольного перемещения поддона 4, выполненный в виде двух спаренга х гатанг 5, гидроцилиндра 6 и закрепленных на концах штанг собачек 7 для захвата цапф 8 поддона, образующих в конце движения поддона из печи с жесткими опорами корпуса гнезда под цапфы, вал 9, на котором консольно раз1пещена платформа 10, раму 11, несущую подшипниковые опоры 12 вала и шарнирно связанную с приводом 13 подъема платформы ползунами, два (14 и 15) из которых жестко связаны с рамой, а один (16) надет на конег вала, под который в корпусе выполнены вертикальные направляющие, четвертый ползун 17 закреплен на другом конце вала, снабженного кривошипом 18. При этом соединение этого вала с рычажным приводом поворота, выполненного в виде двухзвенного рычажного механизма 19, стойки 20, кривошина 21 и качающего
гидроцилиндра 22, осут,ествлено через соосно расположенный вал 23, несущий жестко связанную с ним перпендику- лярную направляющую 24 под четвертый ползун.
Устройства работает следующим образом,
Цикл работы начинается движением штанг 5 в печь, при этом собачки 7,
набегая на цапфы 8 поддона 4, поворачиваются на оси, и штанги 5 проходят вглубь печи несколько дальше поддонае Вышедшие из контакта с цапфами собачки успевают .занять первоначальное положение, после чего на чинается обратное движение штанг. Поддон, увлекаемый.собачками (упираясь в основание штанг, собачки создают жесткие захваты), скользит снаЧсШа по направляющим печи, а затем по направляющим платформы 10 до тех пор, пока оси цапф не совпадут с осью вращения вала 9, что достигается установкой конечн1 1Х выключателей.
В этом положении цап1})Ы оказываются на жестких опорах 3,
Далее включается гидроцилиндр 22 поворота, шток которого переводит шарнирно-рычажный механизм 19 через мертвую точку, а затем поворот происходит под действием силы тяжести поддона с платформой, механизм 19 начинает складываться, опираясь на щток гидроцилиндра, который в данном случае играет роль демпфера..При повороте сила тяжести поддона и плат
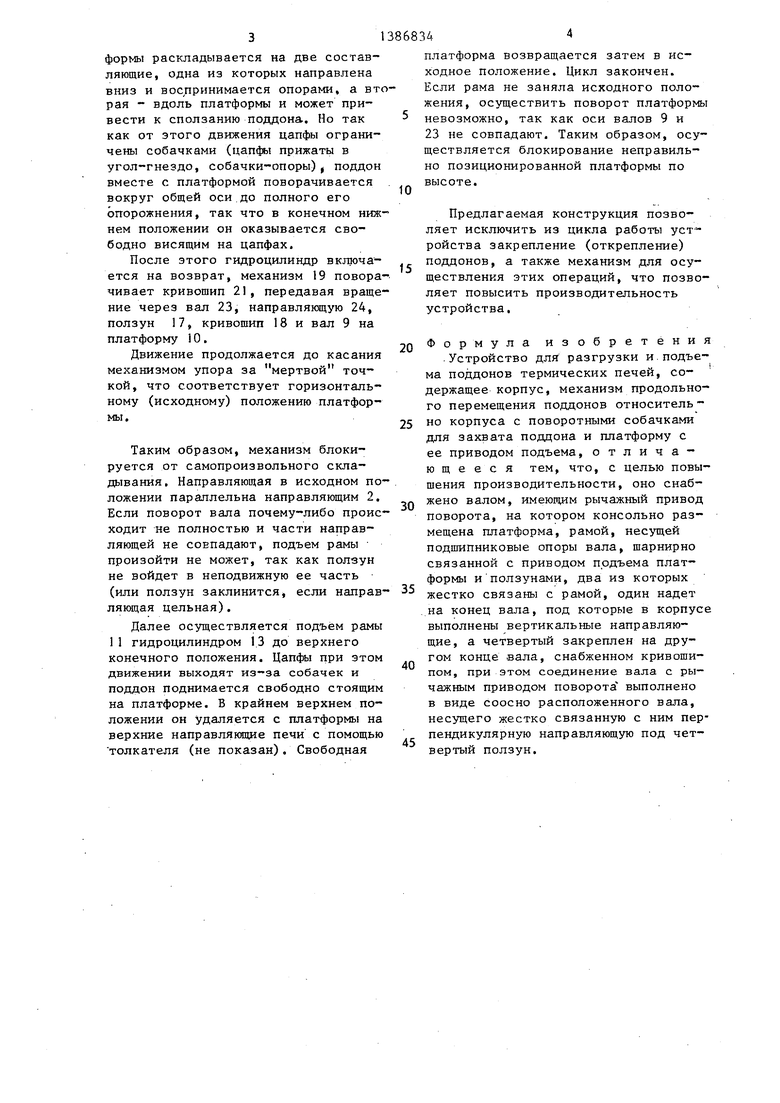
формы раскладывается на две составляющие, одна из которых направлена вниз и воспринимается опорами, а вторая - вдоль платформы и может привести к сползанию поддона. Но так как от этого движения цапфы ограничены собачками (цапфы прижаты в угол-гнездо, собачки-опоры), поддон вместе с платформой поворачивается вокруг общей оси до полного его опорожнения, так что в конечном нижнем положении он оказывается свободно висящим на цапфах.
После этого гидроцилиндр вктаоча- ется на возврат, механизм 19 поворачивает кривошип 21, передавая вращение через вал 23, направлякщую 24, ползун 17, кривошип 18 и вал 9 на платформу 10.
Движение продолжается до касания механизмом упора за мертвой точкой, что соответствует горизонтальному (исходному) положению платформы.
Таким образом, механизм блокируется от самопроизвольного складывания . Направляющая в исходном положении параллельна направляющим 2. Если поворот вала почему-либо происходит не полностью и части направляющей не совпадают, подъем рамы произойти не может, так как ползун не войдет в неподвижную ее часть (или ползун заклинится, если направ ляющая цельная).
Далее осуществляется подъём рамы 11 гидроцилиндром 13 до верхнего конечного положения. Цапфы при этом движении выходят из-за собачек и поддон поднимается свободно стоящим на платформе. В крайнем верхнем положении он удаляется с платформы на верхние направлякщие печи с помощью толкателя (не показан). Свободная
о. 13868344
платформа возвращается затем в исходное положение. Цикл закончен. Если рама не заняла исходного поло
жения, осуществить поворот платформы невозможно, так как оси валов 9 и 23 не совпадают. Таким образом, осуществляется блокирование неправильно позиционированной платформы по высоте.
Предлагаемая конструкция позволяет исключить из цикла работы уст ройства закрепление (открепление) поддонов, а также механизм для осуществления этих операций, что позволяет повысить производительность устройства.
Формула изобретения Устройство для разгрузки и.подъема поддонов термических печей, содержащее корпус, механизм продольного перемещения поддонов относительно корпуса с поворотными собачками для захвата поддона и платформу с ее приводом подъема, отличающееся тем, что, с целью повышения производительности, оно снабжено валом, имеющим рычажный привод поворота, на котором консольно размещена платформа, рамой, несущей подшипниковые опоры вала, шарнирно связанной с приводом подъема платформы и ползунами, два из которых жестко связаны с рамой, один надет на конец вала, под которые в корпусе выполнены вертикальные направляющие, а четвертый закреплен на другом конце вала, снабженном кривошипом, при этом соединение вала с рычажным приводом поворота выполнено в виде соосно расположенного вала, несущего жестко связанную с ним перпендикулярную направляющую под четвертый ползун.
.Z
фиг.4
Фиг.З
| Кантователь изделий | 1981 |
|
SU984986A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ, ПЕРЕМЕЩЕНИЯ И ВЫГРУЗКИ ПОДДОНОВ в АГРЕГАТЕ ДЛЯ ТЕРМООБРАБОТКИ ИЗДЕЛИЙ | 0 |
|
SU307112A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| ff Ю | |||
