I
Изобретение относится к машиностроению, а именно к устройствам для манипулирования заготовками, и может быть применено, например, в термическом производстве для выгрузки заготовок из термических печей и поштучной их выдачи на определенную позицию.
Известно устройство, включающее в себя подвесную приводную тележку и захватно-кантующий pbivf r, концы которого загнуты кверху в виде крюков ll .
Недостатком этого устройства является то, что горизонтальное перемещение тележки осуществляется от одного привода, а захватное движение рычага - от другого.
Известно выгружающее устройство, содержащее захватные клеида с закрепленным под ними поддоном, совершающие возвратно-поступательное движение в горизонтальной плоскости.
Устройство снабжено механизмом подъема захватных клещей и поддона 2.
Однако движение исполнительна органов осуществляется от индивидуальных приводов, что усложняет конструкцию и снижает надежность
Цель изобретения - упрощение конструкции манипулятора, обеспечивающего поштучную выгрузку заготовок из термической печи, уложенных в нее пакетами по две штуки.
Цель достигается тем, что механизм горизонтального возвратно-поступательного перемещения снабжен направлякицими для поддона, связан15ными через рычажную систему с приводом вертикального перемещения, и выполнен в виде цепной передачи, ползуна и каретки с упорами, а механизм смыкания захватов выполнен
20 в виде цепной передачи,ползуна и дополнительной рычажной системы.
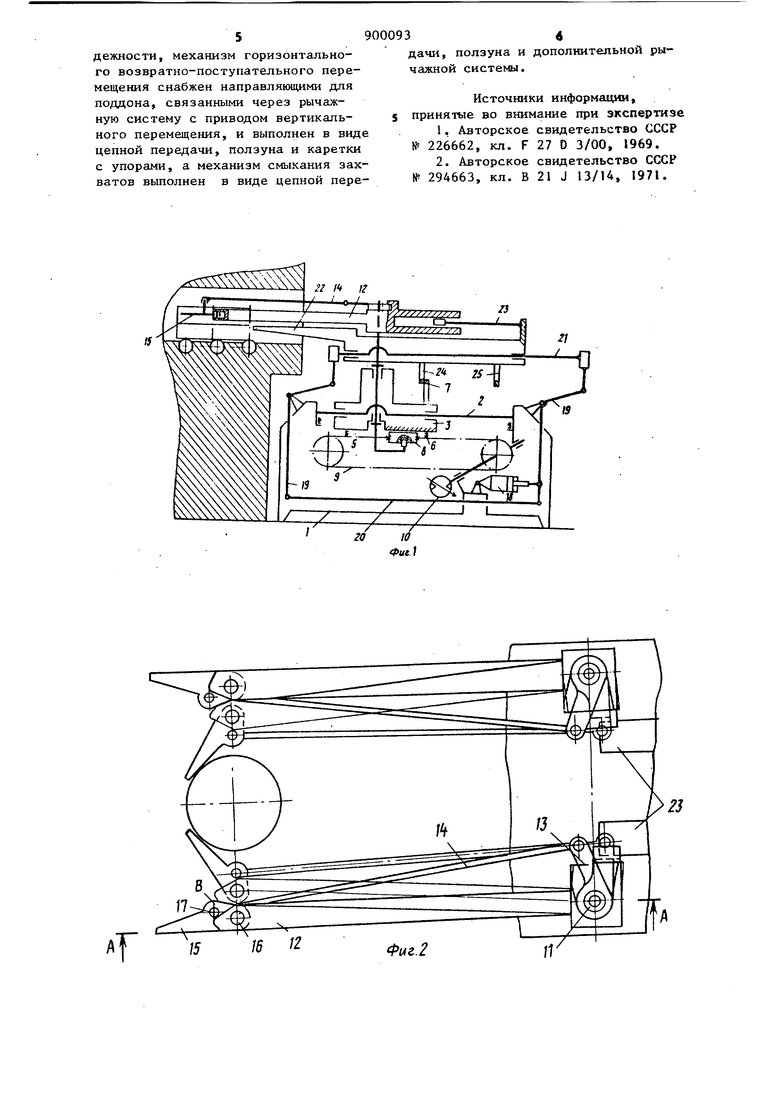
На фиг. 1 изображена кинематическая схема маниггулятора, на фиг. 2 схема взаимодействия рук манипулятора с заготовкой; на фиг. 2 - разрез Л-А на фиг. 2j на фиг. 4 - каре ка манипулятора; на фиг. 5 - разрез Б-Б на фиг. 4. Манипулятор состоит из рамы 1, с закрепленными на ней двумя круглыми направляющими 2, по которым перемещается каретка 3 с закрепленными на ней стойками 4, упорами 5-7 и по пазу которой перемещается ползун 8, связанный цепной передачей 9 с реверсивным пневмодвигателем 10 привода возвратно-поступательного перемещения в горизонтальной плоско ,сти. На валах 11, проходящих внутри стоек 4, посажены с возможностью по ворота и осевого перемещения руки 12 и на шлидах рычаги 13, соединенные тягами 14 с захватами 15, кажды из которых соединен с рукой 12 посредством оси 16 и имеет упорную ось 17. На раме I закреплен пневмоцилиндр 18 привода вертикального пе ремещения, который через рычажную систему 19 и стяжку 20 соединен с двумя круглыми независимыми направляющими 21, по которым перемещается поддон 22 с закрепленными на нем направлякщими 23, входящими в пазы корпусов рук 12 и регулируемыми упо рами 24 и 25, совпадающими с упором 7 только тогда, когда поддон находится в верхнем положении. Манипулятор работает следующим образом. Затвор термической печи дает-комавду на начало цикла работы манипу лятора. Пневмоцилиндр 18, закреплен ный на раме 1, через рычажную систему 19 и стяжку 20 перемещает в ве тикальном направлении независимые направляющие 21 с поддоном 22, который своими направляющими 23 перемещает в том же направлении руки 12 После этого начинает работать пневмодвигатель 10, который через цепную передачу 9 начинает перемещать по пазу каретки 3 в сторону печи ползун 8, который при перемещении до упора 5 через рычаги поворачивает валы 11, установленные в стойках 4. При.этом поворачиваются рычаги 13, которые через тяги 14 поворачивают захваты 15 вокруг осей 16 до упора осей 17 в поверхность 6 . Дальнейший поворот рычагов 13 соответствует повороту рук 12 вокруг 34 осей валов I1. При изменении величины хода ползуна 8 регулируемыми упорами 5 и 6 изменяется угол сведения и разведения рук. Далее ползун 8 через упор 6 перемещает каретку 3 с разведенными руками 12 в сторо ну печи. Каретка, в свою очередь, через упор 7 и упор 24 начинает перемещать в том же направлении поддон 22.-При достижении кареткой крайнего положения дается команда на реверсирование пневмодвигателя 10, Ползун 8 перемещается до упора 6, что соответствует сведению захватов 15 и рук 12 в последовательностиJ Обратной описанной выше. Далее ползун 8 через упор 6 перемещает каретку 3 в обратном направлении, при этом руки 12 перемещают верхнюю заготовку на поддон 22. При дальнейшем перемещении каретка 3 через упоры 7 и 25 перемещает поддон с заготовкой в крайнее дальнее отпечи положение. После этого пневмоцилиндр 18 привода вертикального перемещения опускает поддон с заготовкой на исходную позицию. Выгрузка нижней заготовки на исходную позицию происходит таким же образом. Отличие состоит лишь в том, что привод вертикального перемещения не работает. При этом поддон занимает положение, в котором он как бы является продолжением пода печи, и руки 12 перемещают нижнюю заготовку непосредственно на исходную позицию. Внедрение предлагаемого манипулятора позволяет сократить число рабочих, занятых тяжелым (вес заготовок до 40 кг), монотонным и вредным для здоровья трудом. Экономический эффект от внедрения одного манипулятора составит 5 тыс. руб. в год. Формула изобретения Манипулятор, содержащий штанги с захватами, связанные с поддоном, механизм вертикального перемещения поддона и штанг с захватами, механизм горизонтального возвратнопоступательного перемещения штанг с захватами и поддона и механизм смыкания захватов, отличающийся тем, что, с целью упро щения конструкции и повышения надеж11ости, механизм горизонтального возвратно-поступательного перемещения снабжен направляющими для поддона, связанными через рычажную систему с приводом вертикального перемещения, и выполнен в виде цепной передачи, ползуна и каретки с упорами, а механизм смыкания захватов выполнен в виде цепной передачи, ползуна и дополнительной рычажной система.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 226662, кл. F 27 D 3/00, J969.
2.Авторское свидетельство СССР № 294663, кл. В 21 J 13/14, 1971.

| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |

Л
Л
ду
Л-А
