/А-Д noSepHijino
12
(Л
оо
00 00
со
29 19 20
28
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ ПРОДАЖИ ЗАМОРОЖЕННЫХ ШТУЧНЫХТОВАРОВ | 1968 |
|
SU210509A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| АВТОМАТ ДЛЯ ПРОДАЖИ ШТУЧНЫХ ТОВАРОВ | 1967 |
|
SU215636A1 |
| Установка для контроля и маркировки маканых резиновых изделий | 1982 |
|
SU1126456A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
| Автомат для контроля и сортировки вкладышей подшипников скольжения | 1988 |
|
SU1664416A1 |
| КОНТАКТНОЕ УСТРОЙСТВО | 1971 |
|
SU427408A1 |
| Устройство для ориентирования деталей | 1976 |
|
SU654389A1 |
| Устройство для загрузки деталей | 1991 |
|
SU1802779A3 |
| Предохранительное устройство для круглопильного станка | 1981 |
|
SU1046091A2 |
изобретение относится к контрольно- сортировочной технике в машиностроении и позволяет повысить надежность работы. В корпусе 1 смонтирована транспортирую- ш.ая цепь 7 с поводками 8 для переме- ш.ения деталей по поверхности опорной линейки 3. Приводная звездочка цепи 7 снабжена фрикционной муфтой. Фиксатор цепи состоит из толкателя 18, подпружиненного собачкой 19, и электромагнита 28. При включении электромагнита 28 собачка 19 освобождает толкатель 18, который останавливает цепь 7.. Выталкиватель 17 сталкивает деталь в соответствующий разгрузочный лоток 5. Толкатель 18 возводится в исходное положение с помошью приводного штока 21 и свободно сидяшего на нем рычага 23. 1 з.п. ф-лы, 7. ил.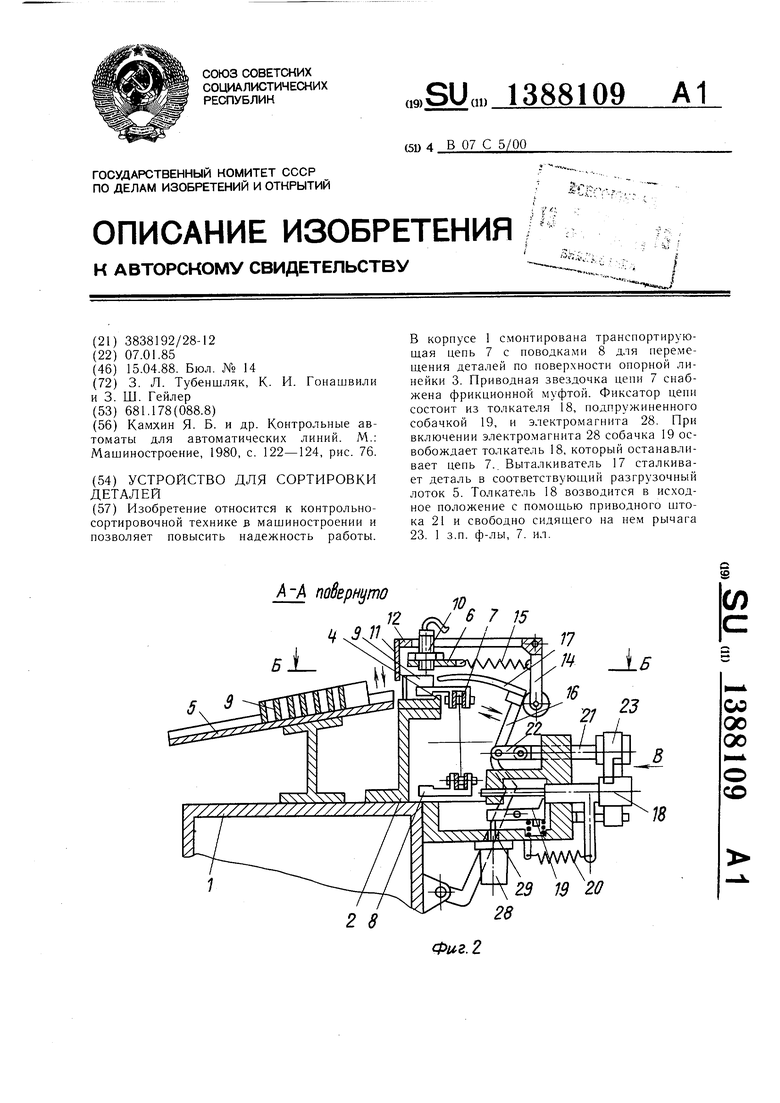
.2
Изобретение относится к контрольно-сортировочной технике в машиностроении и может быть использовано, в частности, для сортировки вкладышей подшипников скольжения.
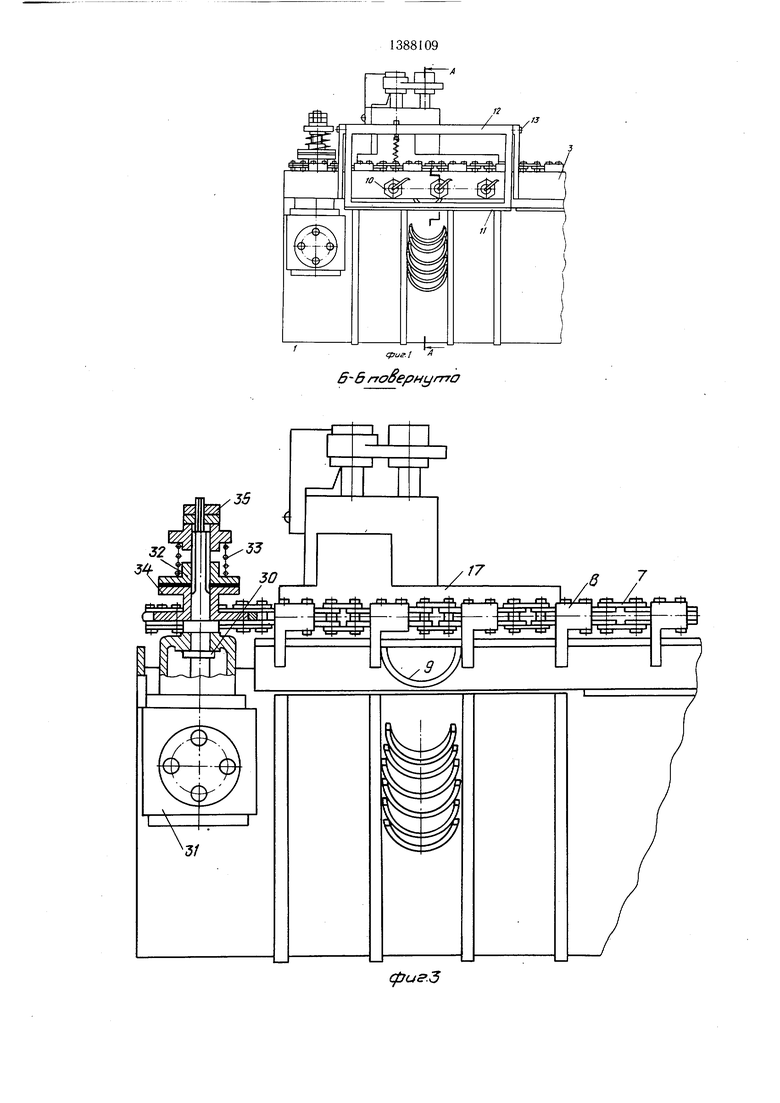
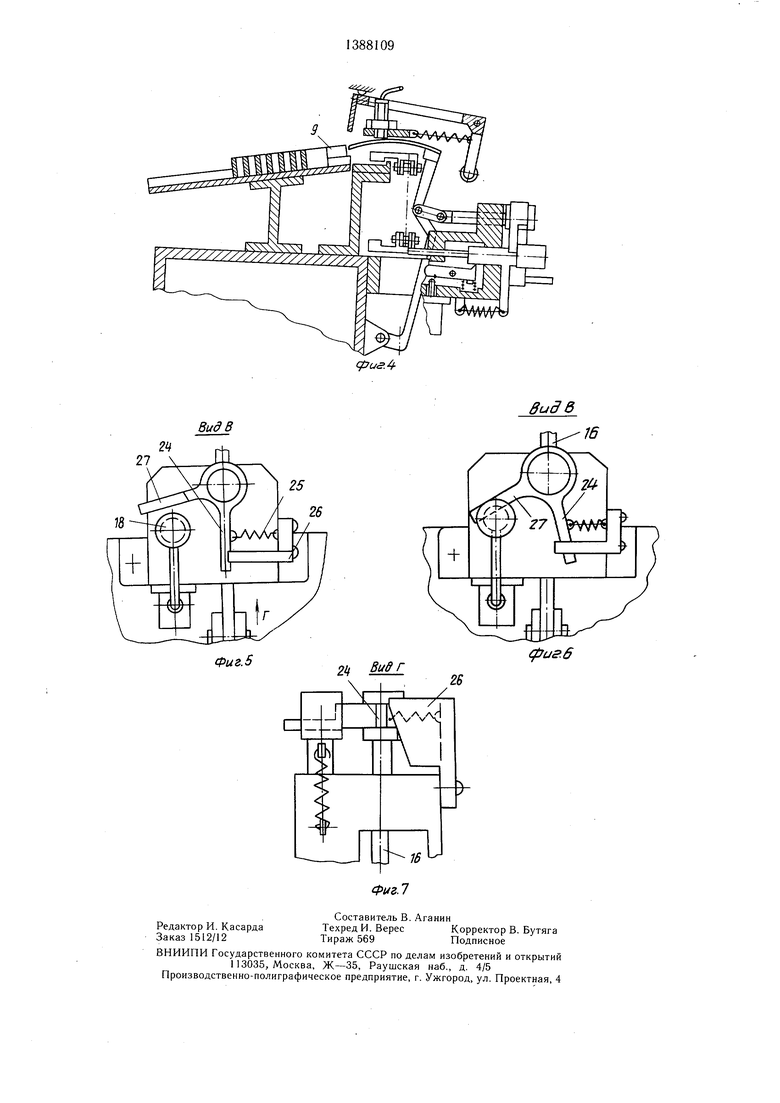
Цель изобретения - повышение надежности работы устройства,На фиг. 1 изображено устройство, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - устройство, ,вид сбоку во время сталкивания детали; на фиг. 5 - вид В на фиг. 2, исходное положение; на фиг. б - то же, во время сталкивания детали; на фиг. 7 - вид Г на фиг. 5.
В корпусе 1 установлена с помош.ью кронштейна 2 опорная линейка 3 с ограничительным буртиком 4. В корпусе закреплены также разгрузочные лотки 5. Над опорной линейкой 3 на станине установлен кронштейн 6. Транспортируюшая цепь 7 снабжена поводками 8 для перемешения сортируе- мых вкладышей 9, с шагом, равным расстоянию между соседними разгрузочными лотками 5. На кронштейне 6 смонтированы бесконтактные электрические датчики 10 наличия деталей 9 по числу лотков 5. На стыке между опорной линейкой 3 и разгрузочными лотками 5 размещена ограничительная шторка 11, закрепленная на рамке 12, которая с помошью оси 13 подвижно установлена на кронштейне 6. Конец 14 рамки 12 контактирует, благодаря пружине 15, с рычагом 16, на котором смонтирован выталкиватель 17. Последний охватывает все разгрузочные лотки 5.
На задней стенке корпуса 1 смонтирован фиксатор цепи 7, состоящий из толкателя 18, который с помошью ПОДПруЖИ-
ненной собачки 19 удерживается в исходном положении. Толкатель 18 прижат к собачке 19 с помощью пружины 20. Параллельно оси толкателя 18 смонтирован шток 21, который через серьгу 22 шарнирно связан с рычагом 16. На конце штока 21 в проточке подвижно установлен двуплечий рычаг 23. Одно плечо 24 рычага 23 усилием пружины 25 контактирует с копиром 26, а второе плечо 27 - с толкателем 18. Якорь электромагнита 28 контак- тирует через толкатель 29 с собачкой 19.
На валу 30 редуктора 31 сидит полумуфта 32, которая пружиной 33 прижата к второй половине полумуфты-звездочки 34, сидящей свободно на валу 30. Усилие пружины 33 регулируется с помощью гаек 35.
Устройство работает следующим образом.
.Вкладыш 9 поступает с измерительной станции (не показана) на опорную линейку 3 между поводками 8 и перемещается цепью 7. Когда вкладыш 9 оказывается под датчиком 10 соответствующей сортировоч- ной группы, срабатывает электромагнит 28. Толкатель 29, воздействуя на собачку 19,
5
О
0 Q
г
0 .
0
5
поворачивает ее вокруг своей оси. Толкатель 18 усилием пружины 20 выдвигается, своим концом заходит между поводками 8 и останавливает цепь 7. При этом полумуфта 32 начинает скользить по поверхности полумуфты-звездочки 34.
Вкладыш 9 останавливается против соответствующего разгрузочного лотка 5. В дальнейщем поворачивается рычаг 16 с выталкивателем 17. Вокруг своей оси 13 под действием пружины 15 поворачивается рамка 12. Ограничительная шторка И поднимается. Выталкиватель 17 перемещает вкладыш 9 в разгрузочный лоток 5. Рычаг 16 через серьгу 22 тянет шток 21. Плечо 24 рычага 23 скользит по наклонной поверхности копира 26. Рычаг 23 поворачивается вокруг оси штока 21. Второе плечо 27 рычага 23 соприкасается с поверхностью толкателя 18, скользит по ней и западает в проточку толкателя 18.
При обратном ходе рычага 16 и штока 21 рычаг 23 начинает перемещать за собой толкатель 18. К концу обратного хода подпружиненная собачка 19 фиксирует толкатель 18 в исходном положении. При этом рычаг 16 поворачивает рамку 12. Шторка 11 опускается. В это время плечо 24 наезжает на копир 26. Рычаг 23 поворачивается вокруг оси щтока 21 и плечо 27 выходит из контакта с толкателем 18. За счет сил трения полумуфта-звездочка 34 вновь начинает вращение. Поводки 8 приносят в зону сортировки новый вкладыщ 9.
Формула изобретения
I1 I
ггоВернуггго
1
и
ери г.
.З
Вид В
27
25
26
Фиг. 5
2if Buff г
виде
иг6
26
| Камхин Я | |||
| Б | |||
| и др | |||
| Контрольные автоматы для автоматических линий | |||
| М.: Машиностроение, 1980, с | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
