1
Изобретение относится к подъемным установкам, а именно к системам автоматического управления электроприводом постоянного тока шахтных подъемных машин, и может быть использовано в системах автоматизации шахтных подъемных установок.
Известно устройство для автоматического управления электроприводом шахтной подъемной машины, содержаш,ее блок пуска, задатчик программы движения, регулятор скорости, формирователь статических характеристик, ограничитель, регулятор и тиристорный преобразователь тока якоря двигателя, соединенные последовательно, датчики тока якоря двигателя и скорости, подключенные ко входам регуляторов соответственно тока якоря двигателя и скорости, и соединенные последовательно регулятор и тиристорный преобразователь тока возбуждения, входы первого из которых подключены к датчику тока возбуждения и выходу формирователя статических характеристик 1.
В таком устройстве для ускорения нарастания тока якоря в момент пуска на второй вход ограничителя подается сигнал с выхода блока задания тока якоря на поверхности.
Это устройство наряду с высокой точностью регулирования установившейся скорости подъемной машины обладает недостаточной точностью регулирования скорости 5 на начальном участке движения.
В устройстве на вход ограничителя тока якоря подается дополнительный сигнал с блока задания тока якоря на поверхности.
10 Это не позволяет обеспечить требуемую точность, так как момент на валу подъемного двигателя появляется только после возникновения потока возбуждения, который, в свою очередь, начинает плавно нарастать вследствии большой постоянной времени обмотки возбуждения и регулятора тока возбуждения после достижения сигналом задатчика программы движения определенной величины. Все это приводит
20 к тому, что при растормаживании подъемной машины подъемный сосуд начинает двигаться вниз, а потом, при достижении достаточного момента, возникает рывок вверх, так как возникает большой сигнал
25 рассогласования на выходе регулятора скорости. Несмотря на незначительную величину обратного хода как по пути, так и по времени, возможна деформация балок в загрззочном пункте, срабатывание зашиты
30 от обратного хода машины и возникновение больших динамических нагрузок в подъемном канате.
Все это резко снижает надежность и безопасность эксплуатации шахтной подъемной установки - одного из главных звеньев технологической цепи шахт и рудников.
Цель изобретения - повышение надежности.
Эта цель достигается тем, что устройство снабжено датчиками загрузки подъемных сосудов, блоком выбора направления их движения, выход которого подключен ко входу формирователя статических характеристик, а входы соединены датчиками загрузки и выходом блока пуска.
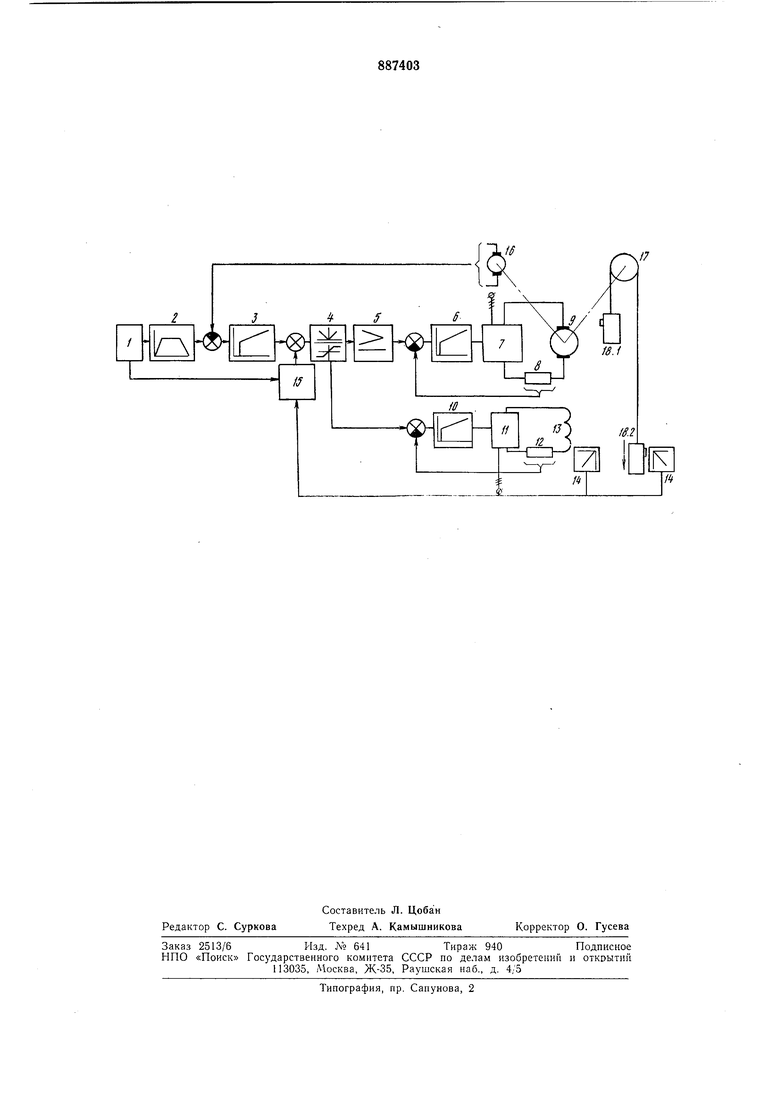
На чертеже показана функциональная схема устройства.
Устройство для управления электроприводом шахтной подъемной машины состоит из последовательно соединенных блоков 1 пуска, задатчика 2 программы движения, регулятора 3 скорости, формирователя 4 статических характеристик, ограничителя 5, регулятора 6 тока якоря двигателя, тиристорного преобразователя 7, датчика 8 тока якоря, выход которого соединен со входом регулятора 6 тока якоря, подъемного двигателя 9. Второй выход формирователи 4 статических характеристик соединен с последовательно соединенными регулятором 10 тока возбуждения и тиристорным преобразователем 11. Датчик 12 тока возбуждения соединен со входом регулятора 10 тока возбуждения и включен в цепь обмотки 13 возбуждения подъемного двигателя. Выходы датчиков 14 загрузки, установленных в погрузочном пункте, связаны с одним из входов блока 15 выбора направления движения, второй вход которого соединен с выходом блока 1 пуска, а выход -со входом формирователя 4 статических характеристик. Выход датчика 16 скорости, связанного с подъемным двигателем 9, соединен со входом регулятора 3 скорости.
На чертеже показаны также подъемная машина 17 и подъемные сосуды 18.1 и 18.2.
Устройство работает следуюш,им образом.
С выхода блока 1 подается сигнал начала движения. Задатчик 2 программы движения начинает формировать программу движения подъемного сосуда в функции времени Одновременно с входным сигналом на вход блока 15 поступает сигнал с датчиков 14 загрузки, и на выходе блока 1& формируется сигнал, полярность которого определяется заданным направлением движения а величина -приложенным статическим моментом. При поступлении вышеупомянутого ступенчатого сигнала на вход формирователя статических характеристик, на его выходах формируются сигналы управления током якоря и током возбужде в результате этого происходит нарастание тока возбуждения и тока якоря подъемного двигателя, а следовательно, и нарастание момента на валу подъемного двигателя. Скорость нарастания момента ограничивается только постоянными времени регуляторов 6 и 10 тока якоря и тока возбуждения. Время нарастания момента, как правило, меньше времени растормаживания подъемной машины, поэтому происходит подхватывание груза, а просадки подъемного сосуда не происходит.
Рывок в устройстве также исключается, так как контур регулирования скорости поддерживает скорость всегда на заданном уровне, начиная с нуля.
В дальнейшем на разгон и замедление подъемной машины дополнительный сигнал не влияет, так как при выходе из зоны действия датчиков 14 загрузки он снимается, а регулятор 3 скорости поддерживает величину скорости на уровне, который задается задатчиком 2 программы движения.
Таким образом, устройство для управления электроприводом шахтной подъемной машины позволяет повысить точность регулирования скорости на начальном участке пути, что приводит к повышению надежности и безопасности эксплуатации шахтной подъемной машины путем снижения динамических нагрузок при работе.
Устройство реализовано на элементах системы УБСР.
Формула изобретения
Устройство для управления электроприводом шахтной подъемной машины, содержашее блок пуска, задатчик программы движения, регулятор скорости, формирователь статических характеристик, ограничитель, регулятор и тиристорный преобразователь тока якоря двигателя, соединенные последовательно, датчики тока якоря двигателя и скорости, подключенные ко входам регуляторов соответственно тока якоря двигателя и скорости, и соединенные последовательно регулятор и тиристорный преобразователь тока возбуждения, входы первого из которых подключены к датчику тока возбуждения и выходу формирователя статических характеристик, отличаюшееся тем, что, с целью повышения надежности, оно снабжено датчиками загрузки подъемных сосудов и блоком выбора направления их движения, выход которого подключен ко входу формирователя статических характеристик, а входы соединены с датчиками загрузки и выходом блока пуска.
Источники информации,
принятые во внимание при экспертизе 1. Автоматизированный электропривод, электротехнология и электроснабжение промышленных предприятий. Экспресс-информация, 1976, № 31 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Устройство для управления электроприводом шахтной подъемной машины | 1986 |
|
SU1388377A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1237593A2 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Устройство для управления подъемной машиной | 1982 |
|
SU1154194A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1986 |
|
SU1324976A1 |