10
S
Фиг. 2
Изобретение относится к промышленному транспорту, а тменно к роликовым конвейерам, и быть использовано для транспор ировки тар- ных и штучш 1х грузов,,
Цель изобретения - расишрение технологических возможностей.
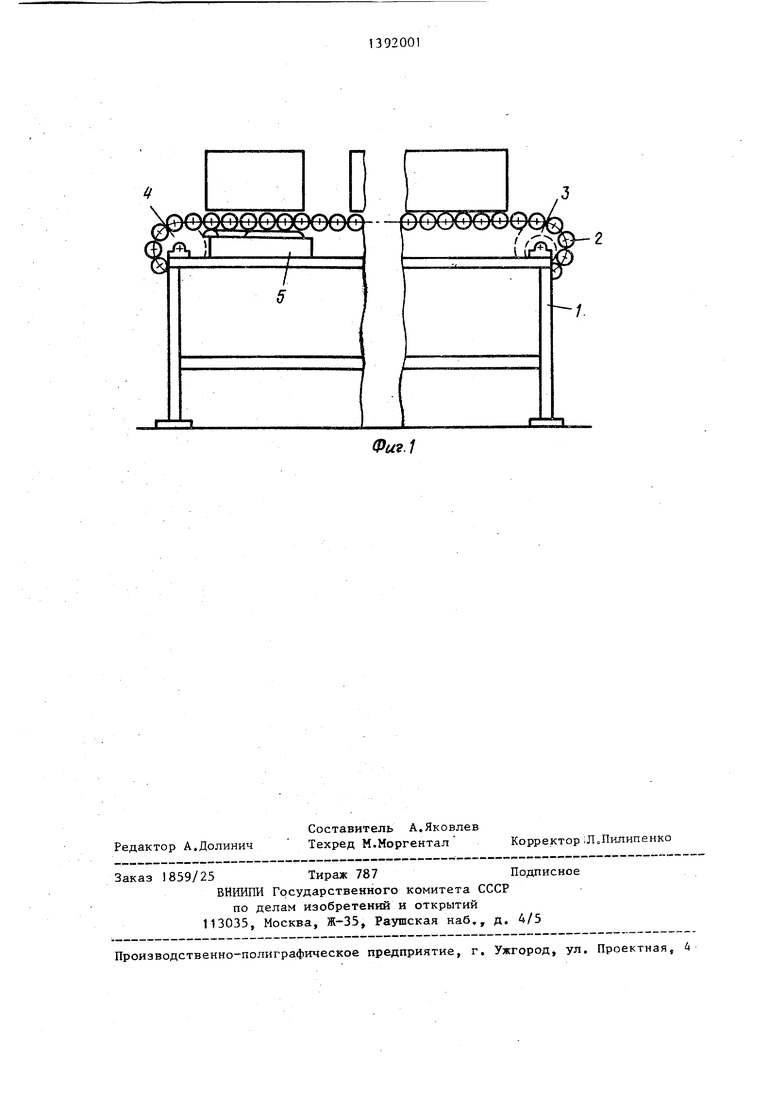
На фиго показан роликовый конвейер, вид сбоку; на с1знг.2 - опорные направляющие, аксонометрия.
Роликовый конвейер содержит раму 1, закрепленные на цепях (не показаны) ролики 2j ведущую 3 и ведомую 4 звездочки и опорные направляющие 5, расположенные под верхней ветвью кон |вейера для взаимодействия с ролика- МИ 2, Продольные направляющие 5 вы ;полнены в виде ползунов 6, установленных в пазах 7 продольных лонжеро- jHOB 8 и попарно соединенных между со Юой поперечинами 9. Продольные лонжероны 8 соединены между собой в юредней части балкой 10, а по краям пластинами 11, На балке 10 закрепле- Мы два гидро- или пневмоцилиндра .2, Ьтоки 13 которых соединены с соответствующими поперечинами 9 и могут перемещать ползуны 6.5 обеспечивая изменение длины опорных направляю : щих 5.
Устройство работает следующим об- раэоМв
Штучные грузы перемещаются движущимся конвейером к месту их выгрузки или перегрузки, при этом проходят тот участок, на котором расположены опорные направляющие 5,
Ролики 2, входя в соприкосновение с ползунами 6j начинают вращать- ся, сообщая штучным грузам дополнительную скорость. Расстояние между Грузами на конвейере на участке рас- положения опорных направляющих за счет этого увеличивается,, Изменение
j 5 о
д
5
длины опорных направляющих 5 посредством гидро- или пневмодилиндров 12 приводит к изменению длины у астка роликового конвейера, на котором грузы имеют увеличенную скорость движения и увеличенное расстояние между собой, а также позволяет плавно регулировать расстояние между упаковками.
Предложенное выполнение опорных направляющих 5 обеспечивает расширение технологических возможностей известного роликового конвейера: плавное регулирование скорости штучных грузов и расстояния между ними в процессе работы конвейера и -за счет этого улучшение условий выгрузки грузов или их перегрузки на последующий рабочий орган. Роликовый конвейер может быть успешно использован в гибких автоматизированных линиях для перемещения штучных грузов и подачи их на различные технологические опера- дии.
Формула изобретения
Роликовый конвейер, содержащий закрепленнь1е на цепях ролики и опорные направляющие, расположенные под верхней ветвью конвейера для взаимодействия с роликами, о тлич аю- щ и и с я тем, что, с целью расширения технологических возможностей, опорные направлякяцие выполнены в виде ползунов, установленных в пазах продольных лонжеронов и попарно соединенных жестко между собой поперечинами, а.лонжероны соединены между собой в средней части балкой, а по краям - пластинами, причем на балке закреплены гидро- или пневмоцилинд- ры, штоки которых соединены с соот- ветствующей поперечиной.
ворофоофоох : 
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальная конвейерная система | 1990 |
|
SU1738743A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ | 2011 |
|
RU2479448C1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ УЛАВЛИВАНИЯ ОБОРВАВШЕЙСЯ ЛЕНТЫ НАКЛОННОГО КОНВЕЙЕРА С ПОДВЕСНОЙ ЛЕНТОЙ | 2009 |
|
RU2411470C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ ГРУЗОВ ИЗ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2333879C1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для перемещения груза на транспортном средстве | 1989 |
|
SU1687537A1 |
| Устройство для загрузки и выгрузки штучных грузов на поддонах из транспортного средства | 1982 |
|
SU1105397A1 |
| Грузоподъемное устройство | 1990 |
|
SU1740310A1 |
| Устройство для перегрузки затаренных мешков | 1987 |
|
SU1532466A1 |
Изобретение относится к промышленному транспорту, а именно к роликовым конвейерам, и может быть использовано для транспортировки тарных и штучных грузов. Цель изобретения - расширение технологических возможностей. При движении роликового конвейера с грузами ролики на участке расположения опорных направляющих входят в соприкосновение с ползунами 6 и начинают принудительно вращаться, сообщая штучным грузам дополнительную скорость и увеличивая расстояние между грузами. Изменение скорости и расстояния можно плавно регулировать посредством гид- ро- или пневмоцилиндров 12, штоки 3 которых перемещают поперечины 9 и ползуны 6 в пазах 7 продольных лонжеронов 8, меняя тем самым длину опорных направляющих. Предложенное выполнение опорных направляющих обеспечивает расширение технологических возможностей для перемещения штучных грузов и подачи их на различные технологические операции. 2 ил. i (Л
Фи.1
| Ивановский К.Е | |||
| и др | |||
| Роликовые и дисковые конвейеры и устройства | |||
| М.: Машиностроение, 1973, с.144. |
