Изобретение относится к машиностроению и может найти применение, например,в промышленных рототах, манипуляторах и автооператорах.
Известна кисть руки промышленного робота/ содержащая схват, корпус, приводы и механизмы вращения и качания схвата, выполненные в виде зубчато-реечной передачи Till
Недостатком известного схвата является низкое быстродействие изза большой массы перемещаемых деталей,
Цель изобретения - повышение быс троде йс ТВ ия.
Цель достигается тем, что в кисти руки промышленного робота, содержащей схват, корпус, приводы и механизмы вращения и качания схвата, выполненные каждый в виде зубчато-реечной передачи, имеющей зубчатый вал, механизм вращения схвата снабжен тягой и дополнительной зубчато-реечной передачей с несколькими рейками,приэтом по меньшей мере одна из реек дополнительной зуб ато-реечной передачи связана с приводом, а другая рейка этой же передачи при помощи тяги жестко связана рейкой механизма вращения схвата, при этом в зубчатом валу механизма качания схвата выполнено осевое отверстие, в котором размещена рейка механизма вращения схвата, кроме того, рейки дополнительной зубчато-реечной передачи перпендикулярны.
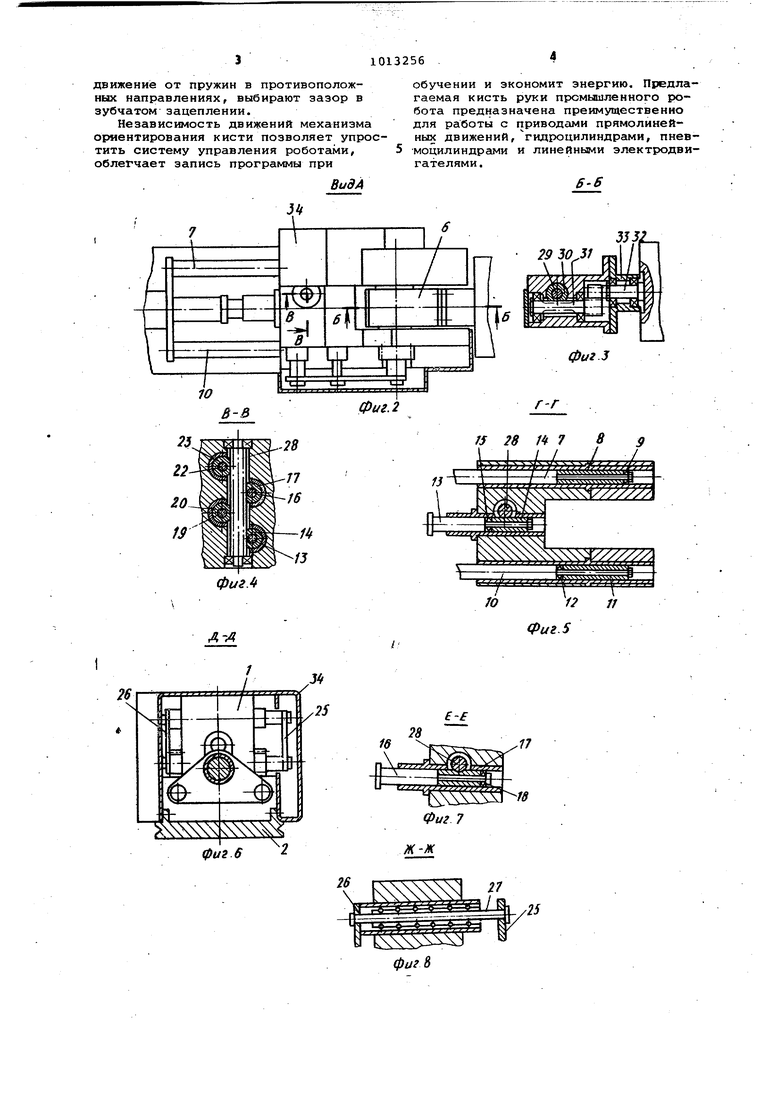
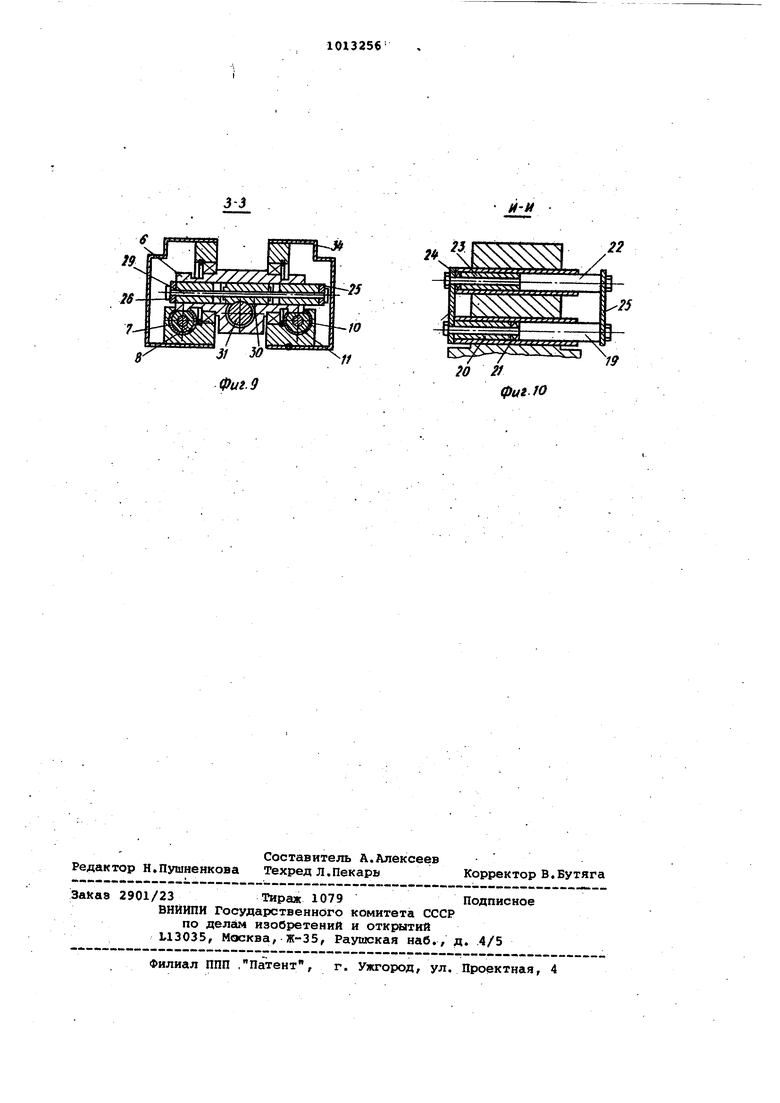
Нх фиг..- кисть руки промышленного робота, общий вид; на фиг.2 вид А на фиг.1; на фиг.З - сечение Б-В на фиг.2 (поперечное сечение по зубчатому валу механизма качания); на фиг.4 - сечение В-В на фиг.2 (сечение по промежуточному зубчатому валу); на фиг.5 - сечение Г-Г на фиг.1 (сечение по штокам механизма качания и приводному штоку механизма вращения); на фиг.б сечение Д-Д на фиг.1 ( сечение по направляющей руки, на которой установлена кисть),; на фиг. 7 - сечение Е-Е на фиг.1 (сечение по приводному штоку механизма вращения); на фиг.8 - сечение Ж-Ж на фиг.1 (сечение по направляющей качения механизма вращения); на фиг.9 сечение 3-3 на фиг.1 (продольное сечение по зубчатому валу механизма качания);.на фиг.10 - сечение И-И на фиг.1 (сечение по передаточным штокам).
Кисть руки промышленного робота состоит из корпуса 1, установленног на направляющей 2 руки,схвата 3, привода 4 механизма качания, привода 5 механизма вращения, механизма качания схвата, состоящего из зубчатого вала 6, штока 7 с установленной на нем основной рейкой 8 и пружиной 9, штока 1.0 с установленной на нем рейкой И и пружиной 12. В корпусе 1 установлен механизм
5 вращения схвата, состоящий из приводного штока 13 с установленной на нем рейкой 14 и пружиной-15 и приводного штока 16 с установленной нанем рейкой 17 и пружиной18,
0 передаточного штока 19 с рейкой 20 и пружиной 21 и передаточного штока 22 с рейкой 23 и пружиной 24. Концы штоков 19 и 22 связаны тягами
25и 26, которые установлены на на5 правлякяцих 27 качения. Зубчатые рейки 14, 17, 20 и 23 связаны с промежуточным зубчатым валом 28, установленным в корпусе 1. Тяги 25 и
26связаны с осью 29, проходящей 0 внутри зубчатого вала механизма 6
качания. На оси 29.установлена зубчатая рейка 30, входящая в зацепление С зубчатьам валом 31, установленным на зубчатом валу б.Вал 31
5 соединяется с валом 32, связанным с схватом 3 и установленным в стакане 33. Приводы кисти и механизмы кисти закрыты кожухом 34.
Кисть руки промышленного робота
п работает следующим образом.
Штоки 1 и 10с установленными на них рейками 8 и 11 получают поступательное движение от привода 4. Рейки 8 поворачивают зубчатый вал 6. с установленным на нем
- схватом 3. Происходит движение ка, схвата. При этом вал б поворачивается вместе с зубчатым валом 31 и зацепляющейся с ним рейкой 30 вокруг оси 29, не передавая
0 на нее движение.
Вращение схвата происходит следующим образом.
Штоки 13 и 16 с установленнымис на них рейками 14 и 17 получают поступательное движение от привода 5. Рейки 14 и 17 находятся в зацеплении с промежуточным зубчатым валом 28 и поворачивают его. .Вал 28, вращаясь, дает поступательное движение штокам 19 и 22 через установленные на них рейки 20 и 23, Штоки 19 и 22 передают поступательное движение через тяги 25 и 26 на ось 29 и установленную на ней основную рейку 30. Чтобы избежать заклинивания, тяги 25
и 26 установлены на двух направляющих 27 качения. Рейка 30 входит в зацепление с зубчатьвл валом 31 и через него поворачивается
через него поворачивает вал 32, связанный со схватом.
Происходит вращение схвата 3. Для выбора зазора в зубчатых зацеплениях рейки, установленные на
цггоках, подпружинены, и,получая
движение от пружин в противоположных направлениях, выбирают зазор в зубчатом зацеплении.
Независимость движений механизма ориентирования кисти позволяет упростить систему управления роботами, облегчает запись программы при
ВидА
обучении и экономит энергию. Предлагаемая кисть руки промышленного робота предназначена преимущественно для работы с приводами прямолинейных движений, гидроцилиндрами, пневмоцилиндрами и линейными электродвигателями.
6-6
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
КИСТЬ РУКИ ПРОМЫШЛЕННОГО РОБОТА, содержащая схват, корпус, пц иводы и механизмы вращения и качания схвата, вьшдлненные каждый в виде зубчато-реечной передачи, име щей эубчатый вал, отличаю: щ а я с я тем, что, с целью повышения быстродействия, механизм вра т1 Фиг..1 щения схвата снабжен тягой и дополнительной зубчато-реечной передачей с несколькими рейками, при этом по меньшей мере одна из зубчатых реек дополнительной зубчато-реечной передачи связана с одним приводом, а другая рейка этой же передачи при помощи тяги жестко связана с рейкой механизма вращения схвата, при этом в зубчатом валу механизма качания рхвата выполнено осевое отверстие, в котором размещена рейка механизма вращения схвата, кроме того, рейки дополнительной зубчато-реечной передачи перпендикулярны.
B-S
-28
фиг.
А-А
29
фиг 3
г-г
фиг. 2
75 28 lit 7 8 9
./. J...J... :А
j ) ДЬ yj ooj -lar.fjr.i
1)
3-3
H-U
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1979 |
|
SU814719A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
