Известен сустав задающего органа дистанционного копирующего манипулятора с воспроизведением усилия нагрузки исполнительного органа с номощью следящей системы, содерл.ащий датчик управления положением исполнительного органа, датчик усилия нагрузки, приводной электродвигатель с редуктором и датчик усилия оператора, выполненный из упругого деформируемого элемента и измерителя его деформации.
Сустав не имеет устройства для предотвращения обратного воздействия нагрузки, что приводит к режиму короткого замыкания и увеличению потребной мощности приводного электродвигателя.
Предложенный сустав отличается от известного тем, что, с целью устранения режима короткого замыкания и уменьщения нотребной мощности приводного электродвигателя, между валом его приводного электродвигателя и упругим элементом датчика усилия оператора установлен самотормозящийся механический редуктор, а следящая система управления выполнена релейной и связана с датчиком усилия нагрузки и с датчиком усилия оператора.
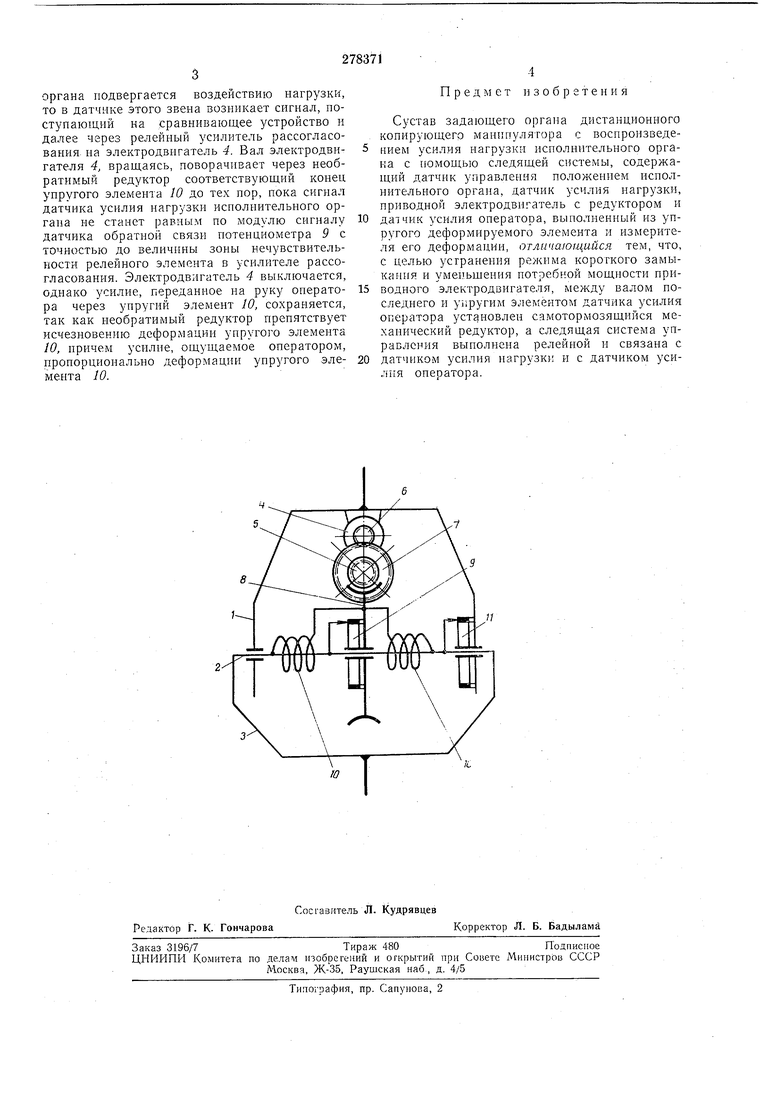
На чертеже дана кинематическая схема сустава манипулятора.
закрепленной на корпусе или смежном звене, расположены электродвигатель 4, приводящий в движение червяк 5 через зубчатые щестерню 6 W. колесо 7, и опоры червяка 5. Последний входит в зацепление с червячным колесом 8, имеющим возможность вращаться относительно вала 2. На червячном колесе крепится обмотка потенциометра 9 обратной связи. Движок потенциометра 9 связан с валом 2 и дает сигнал, пропорциональный относительному углу поворота вала 2 и колеса 8, т. е. углу закрутки пружины (упругого элемента) 10, концы которой закреплены на валу 2 и колесе 8. Угол поворота вала 2 относительно верхней части сустава измеряется потенциометром 11, обмотка которого расположена на верхней части сустава, & движок-- на валу 2. Оператор прикладывает усилия к рукоятке части сустава.
Работает сустав задающего органа манипулятора следующим образом.
Оператор, действуя на рукоятку нижней части сустава непосредственно, или через смежное звено, поворачивает вал 2 относительно неподвижной верхней части, преодолевая начальное сопротивление упругого элемента 10. Датчик угла поворота (потенциометр //) вырабатывает сигнал управления положением, который отрабатывается соответствующим приводом звена исполнительного органа. Если при этом звено исполнительного
органа подвергается воздействию нагрузки, то в датчике этого звена возникает снгнал, иоступающий на сравнивающее устройство и далее через релейный усилитель рассогласования на электродвигатель 4. Вал электродвигателя 4, вращаясь, поворачивает через необратимый редуктор соответствующий конец упругого элемента 10 до тех иор, пока сигнал датчика усилия нагрузки исполнительного органа не станет равным ио модулю сигналу датчика обратной связи нотенциометра 9 с точностью до величины зоиы нечувствительности релейного элемента в усилителе рассогласования. Электродвигатель 4 выключается, однако усилие, переданное на руку оператора через упругий элемент 10, сохраняется, так как необратимый редуктор препятствует исчезновению деформации упругого элемеита 10, причем усилие, ощущаемое оператором, пропорциоиально деформации упругого элемента 10.
4 Предмет изобретения
Сустав задающего органа дистанционного копирующего манипулятора с воспроизведением усилия нагрузки исполнительного органа с номощь о следящей системы, содержащий датчик управления положением исиолнительного органа, датчик усилия нагрузки, приводной электродвигатель с редуктором и датчик усилия оператора, выполненный из упругого деформируемого элемента и измерителя его деформации, отличающийся тем, что, с целью усгранения режима короткого замыкания и уменьшения потребной мощности приводного электродвигателя, между валом последнего и у.фугим элементом датчика усилия оператора установлен самотормозящийся мехаиический редуктор, а следящая система управления выполнена релейной и связана с датчиком усилия нагрузки и с датчиком усилия оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| СУСТАВ МАНИПУЛЯТОРА | 1972 |
|
SU428935A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1977 |
|
SU627959A1 |
| ДИСТАНЦИОННЫЙ КОПИРУЮЩИЙ МАНИПУЛЯТОР | 1970 |
|
SU275680A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1972 |
|
SU423624A1 |
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА В ЗВЕНЕ РОТАЦИИ ПЛЕЧА ДИСТАНЦИОННОГО МАНИПУЛЯТОРА | 1973 |
|
SU381501A1 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
