Фиг.1
Изобретение относится к подъемно- ilpaHcnopTHOMy машиностроению, а имен- rto к гравитационным роликовым кон- Йейерам, обеспечиваклцим передачу грузов с наклонных участков гравитацион- ttbix конвейеров на горизонтальные участки с одновременным торможением.
Цель изобретения - повьшение надежности работы конвейера,
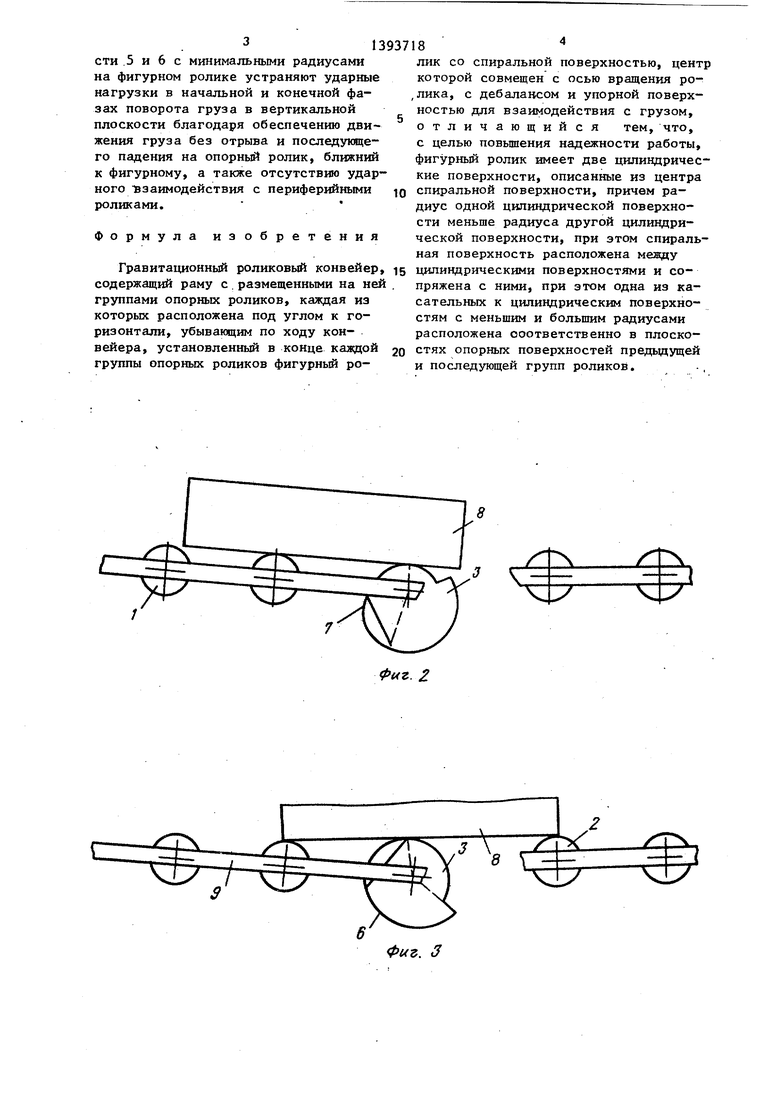
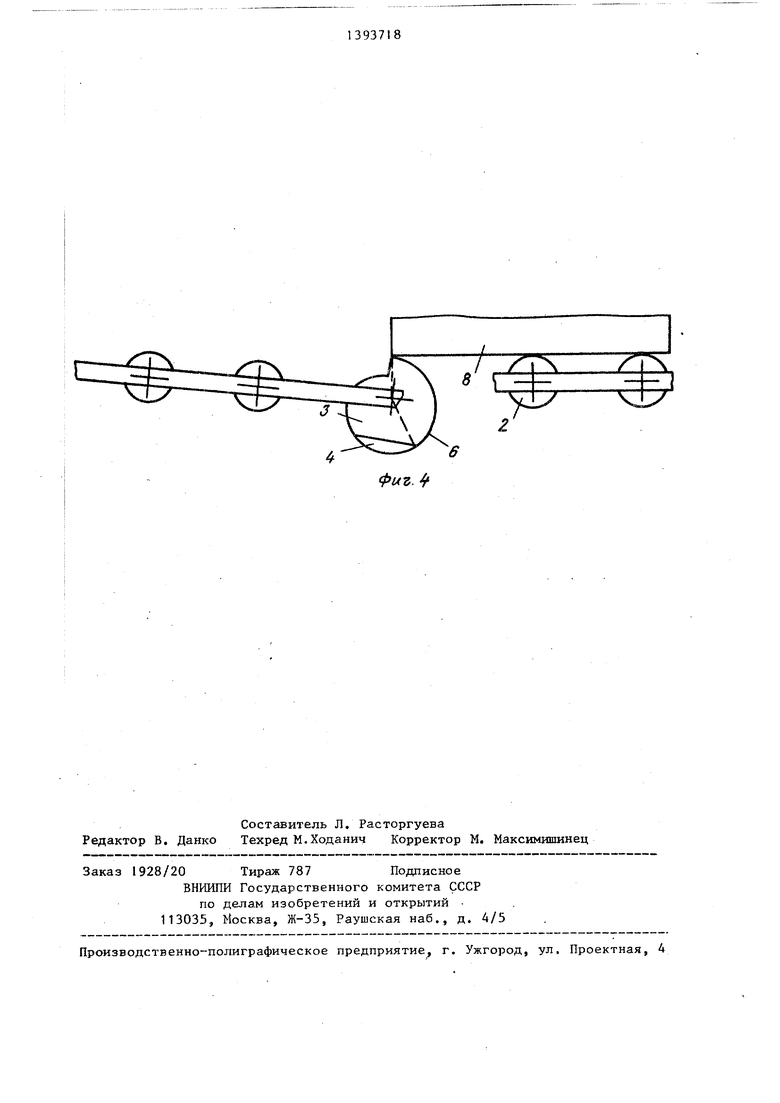
На фиг. 1 изображен конвейер в момент встречи груза с фигурным роликом; на фиг. 2 - то же, в момент за Е;ершения движения груза по цилиндрической поверхности минимального ра- |иyca фигурного ролика; на фиг. 3 - ijo же, в момент завершения движения г|руза по спиральной поверхности фигурного ролика; на фиг. 4 - то же, в йомент завершения движения груза по фшиндрической поверхности максималь- Ного радиуса фигурного ролика.
Гравитационный роликовьй конвейер Додержит группы опорных роликов 1 и , каждая из которых расположена под глом к горизонтали, убывающим по г;оду конвейера, и установленный в 1;онце каждой группы опорных роликов фигурный ролик 3 с дебалансом 4. Фигурньм ролик 3 содержит три Опорные поверхности; цилиндрическую $ минимального радиуса R, , заклю- )енную между точками а и а, ; цилинд- 1| ическую 6 максимапьного радиуса :Цключенную между точками а и и )асположенную между ирг1ливдрическими 1 оверхностями и сопряженную с ними Йпиральную 7 с радиусом, возрастающи т А(ин точке а, до К„аксВ точке а. Геометрические центры указанных Поверхностей совпа,цают с центром вра 1Йения фигурного ролика 3 (осью роли- ijca 3). Для надежности работы конструкции длины дуг Laa, цилин- Йрических поверхностей соответственн яинимального и максимального радиусо должны иметь следующие значения
Ь,с„ K,(L -2Ъ); La,a, (0 5г + L-Ъ),
Где К;, (1,05.. .1,15) - коэффициент запаса по длине;
L - длина грузов 8;
Ъ - шаг расстановки опорных роликов;
г - радиус опорных роликов.
5 0
5 О Q
0
5
Группы onopHijK роликов 1 и 2 размещены на раме 9. При этом одна из касательных к цилиндр1гческим поверхностям с меньшим и большим радиусами расположена соответственно в плоскостях опорных поверхностей предыдущей и последующей групп роликов. Уступ, образованный разностью радиусов Е«дкс и Нд,и„ цилиндрических поверхностей 5 и 6, является упорной поверхностью для взаимодействия с грузом.
Гравитационный роликовый конвейер работает следунлцим образом.
В исходном положении фигурный ролик 3 за счет противовеса 4 находится в состоянии покоя, при этом уступ, образованньш разностью радиусов Нд,акс и , расположен перпендикулярно опорной плоскости груза, движущегося по группе опорш 1х роликов 1.
Транспортируемый груз В, перемещаясь по группе опорных роликов 1, входит в контакт с уступом фигурного ролика 3 (фиг. 1) и при дальнейшем перемещении вращает его. За счет цилиндрической поверхности 5 минимального радиуса на фигурном ролике 3 движение груза сохраняется поступательным до момента выхода его задней грани с предпоследнего ролика группы опорных роликов 1 (фиг. 2). С этого момента опорная плоскость груза 8 начинает взаимодействовать со спиральной поверхностью 7 фигурного ролика 3, вследствие чего происходит подъем передней грани груза 8 до уров- уровня плоскости, касательной к опорным роликам 2 последующей группы (фиг. 3), В этот момент движения под опорную плоскость груза 8 подходит цилиндрическая поверхность 6 фигурного ролика 3, :имеющая максимальный радиус. Дальнейшее поступательное движение груза 8 сопровождается его опиранием на опорные ролики 2 последующей группы и на цилиндрическую поверхность 6 фигурного ролика 3 (.фиг. 4). При прекращении контакта транспортируемого груза 8 с цилиндрической поверхностью 6 он полностью переходит на опорные ролики 2 последующей группы, а фигурный ролик 3 под действием противовеса 4 устанавливается в исходное положение.
Предлагаемый гравитационньй роликовый конвейер надёжен в работе за счет снижения ударных нагрузок. Действительно, цилиндрические поверхности 5 и 6 с минимальными радиусами на фигурном ролике устраняют ударные нагрузки в начальной и конечной фазах поворота груза в вертикальной плоскости благодаря обеспечению движения груза без отрыва и последукяце- го падения на опорный ролик, ближний к фигурному, а также отсутствию ударного взаимодействия с периферийными роликами.
Формула изобретения
лик со спиральной поверхностью, центр которой совмещен с осью вращения ро- ,лика, с дебалансом и упорной поверхностью для взаимодействия с грузом, отличающийся тем, что, с целью повьшения надежности работы, фигурный ролик имеет две цилиндрические поверхности, описанные из центра спиральной поверхности, причем радиус одной цилиндрической поверхности меньше радиуса другой цилиндрической поверхности, при этом спираль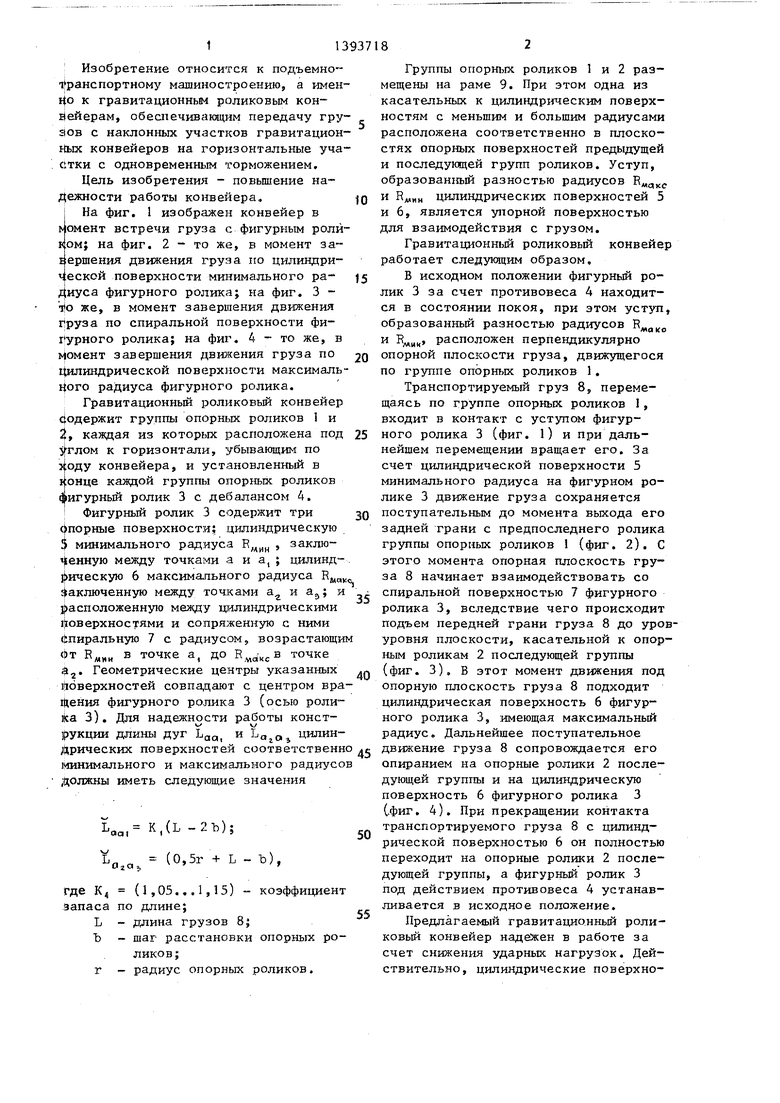
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов | 1979 |
|
SU829516A1 |
| Гравитационный роликовый конвейер" | 1971 |
|
SU365098A1 |
| Гравитационный роликовый конвейер | 1977 |
|
SU686945A1 |
| Устройство для передачи грузов с наклонной секции гравитационного роликового конвейера на горизонтальную секцию | 1983 |
|
SU1105423A1 |
| Гравитационный роликовый конвейер | 1978 |
|
SU740618A1 |
| Гравитационный конвейер | 1977 |
|
SU713778A1 |
| Устройство для передачи грузов с наклонной секции гравитационного конвейера на горизонтальную секцию | 1982 |
|
SU1041453A1 |
| Устройство для передачи грузов с наклонной роликовой секции на прямолинейную | 1980 |
|
SU865752A1 |
| Перегрузочное устройство для штучных грузов | 1977 |
|
SU701896A1 |
| Гравитационный роликовый конвейер для штучных грузов | 1982 |
|
SU1087424A2 |
ная поверхность расположена мелоду Гравитационный роликовый конвейер, ig цилиндрическими поверхностями и сосодержащий раму с. размещенными на ней . группами опорных роликов, каждая из которых расположена под углом к горизонтали, убывающим по ходу конпряжена с ними, при этом одна из касательных к цилиндрическим поверхностям с меньшим и большим радиусами расположена соответственно в плосковейера, установленный в конце каждой 2о стях опорных поверхностей предьщущей
группы опорных роликов фигурный рои последующей групп роликов.
пряжена с ними, при этом одна из касательных к цилиндрическим поверхностям с меньшим и большим радиусами расположена соответственно в плоскои последующей групп роликов.
Фиг. Z
Фиг. 3
фиг.
| Гравитационный роликовый конвейер" | 1971 |
|
SU365098A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Авторское свидетельство СССР № 388489, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
