Изобретение относится к области механизации и автоматизации погрузочио-разгрузочных работ.
Известно устройство для распределения штучных грузов по перпендикулярным основному потоку направлениям, подвесная рама которого установлена на штангах, опирающихся на подпруяр1ненные стойки, а тяговый орган снабжен расположенными на ломаюшихся рычагах роликами, взаимодействуюидами с копирами, вязанны1ии через рычаги с приво-. дом 1..
Однако это устройство не обеспечивает безударной передачи грузов на средства непрерьганого транспорта и имеет дополнительные приводы для подъема и опускания копиров.
Известно также перегрезочное устройство для штучных, грузов, включающее опору с установленными на ней упором, передающую секцию, смонтированную на раме и установленную на щт-анге подъёмника 2.
Недостатком известного устройства является то, что передаюн1ую секплю целесообразно
использовать в качестве связующего звена только гравитационных роликовых конвейеров, расположенных на разных уровня), а также она не обеспечивает безударную передачу груза.
Целью изобретения является обеспечение безударной передачи грузов на средства непрерьшного транспорта с перемещением груза в горизонтальной плоскости.
Поставленная цель достигается тем, что рама передающей секции снабжена вращающимися осями с дисками и звездочками на конце, связанными между собой гибкой связью, а опора - реечной направляющей, при этом на одной из осей укреплена посредством спиральной плоской пружины шестерня, взаимодействующая с реечной направляющей, а на другой - храповое колесо, причем на раме устанорлена двуплечая собачка взаимодействующая с храповым колесом и с упором.
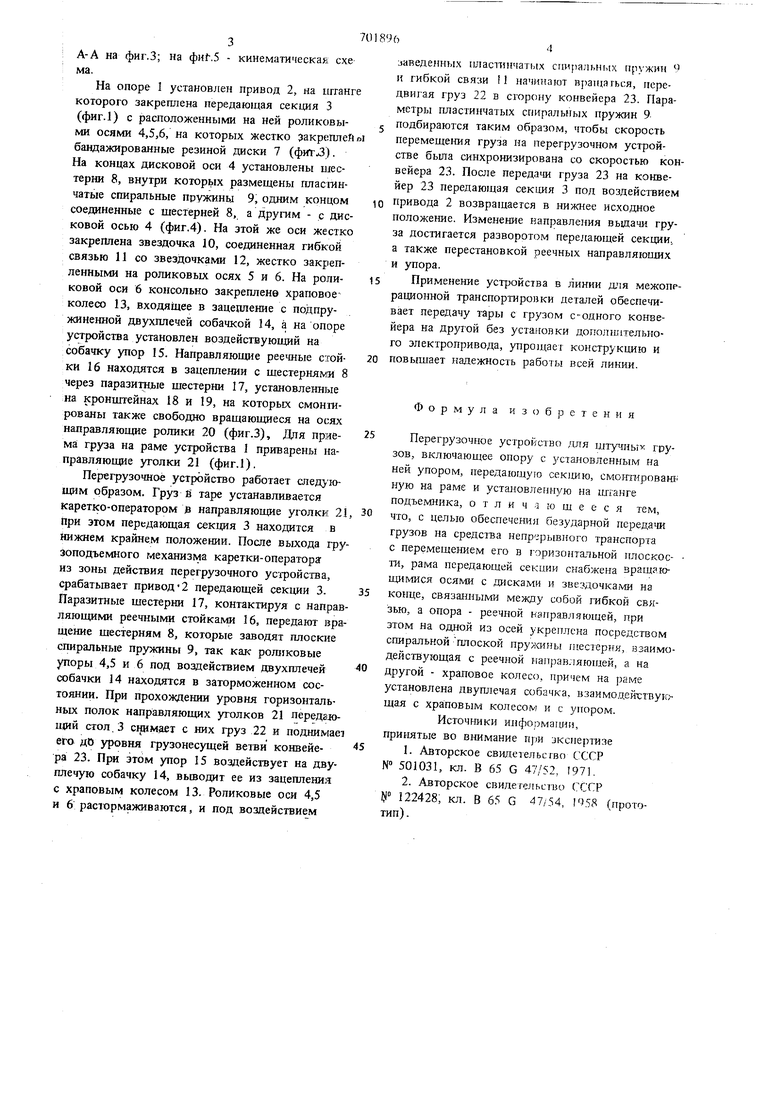
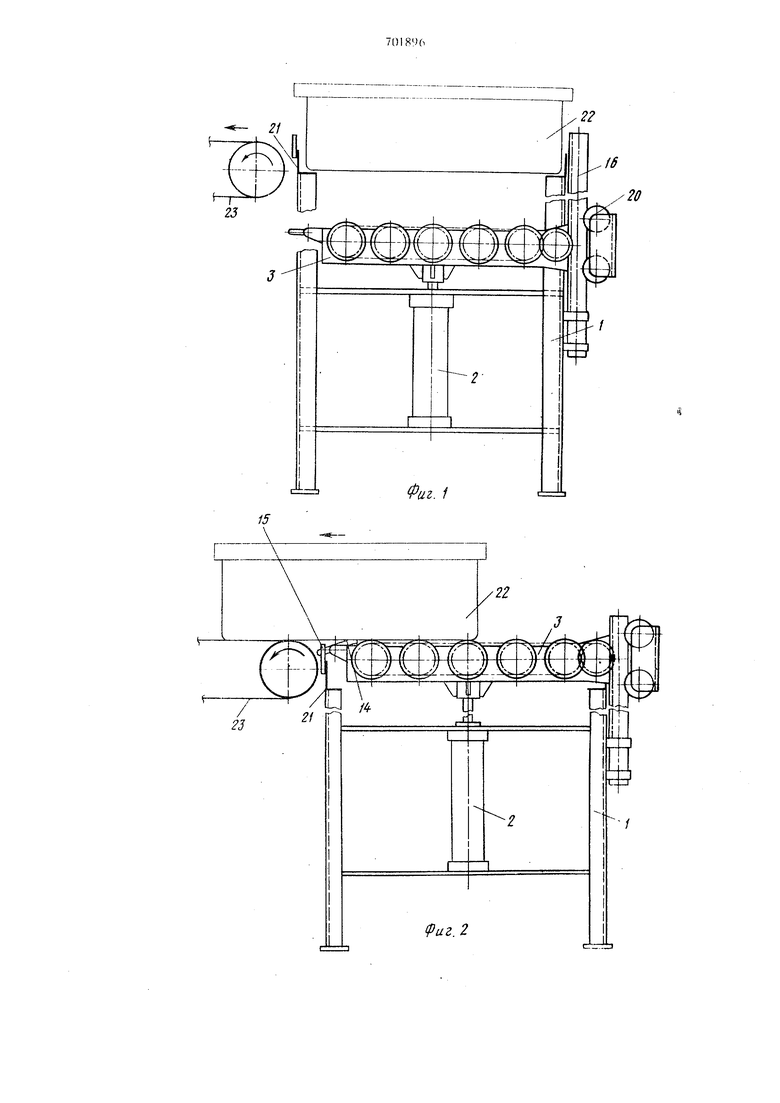
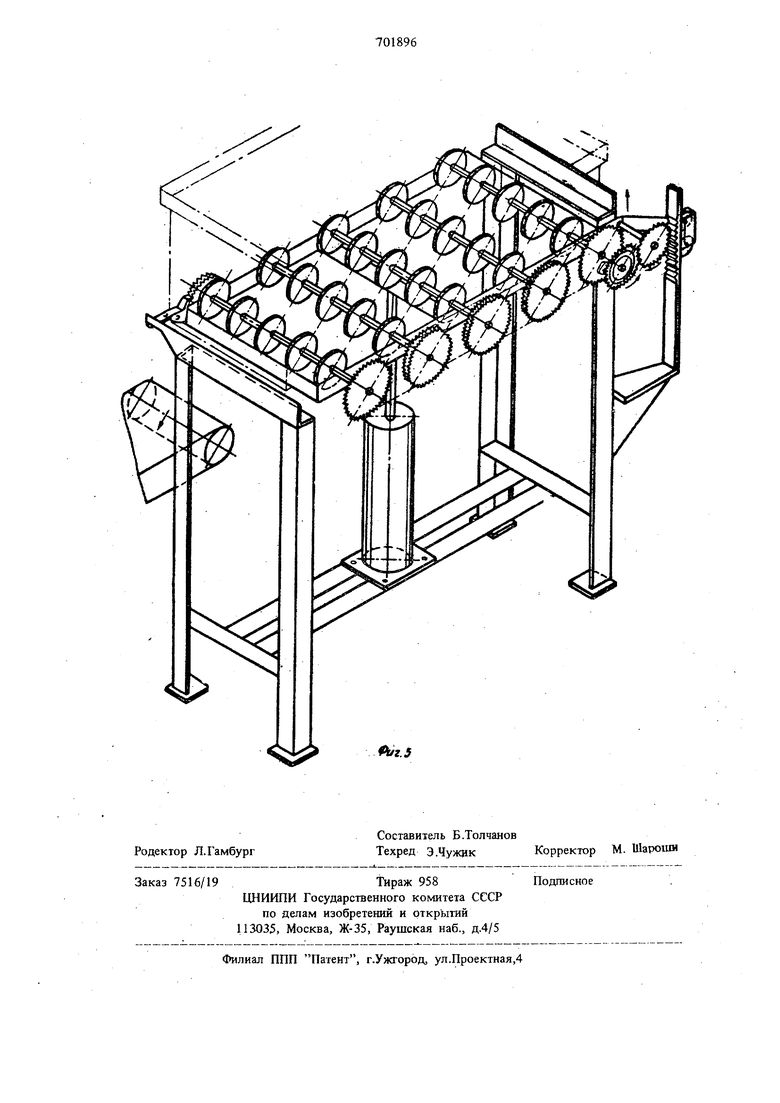
На фиг.1 изображено описываемое перегрузочное устройство, положение лля приема груза; на фиг.2 - то же, положение для разгрузки; на фиг.З - вид сверху; на фиг.4 - сечете
А-А на фиг.З; на фи.5 - кинематическая схе ма.
На опоре 1 установлен привод 2, на игганге которого закрегошна передающая секция 3 (фиг.1) с расположенными на ней роликовыми осями 4,5,6, на которых жестко закреплейы бандажированные резиной диски 7 (фиTJЗ). На концах дисковой оси 4 установлены шестерни 8, внутри которых размещены пласганчатые спиральные пружины 9, одним концом соединенные с шестерней 8, а другим - с дисковой осью 4 (фиг.4). На этой же оси жестко закреплена звездочка 10, соединенная гибкой связью И со звездочками 12, жестко закрепленными на роликовых осях 5 и 6. На роликовой оси 6 консольно закреплене храповое колесо 13, входящее в зацепление с подпружиненной двухплечей собачкой 14, а на опоре устройства установлен воздействующий на собачку упор 15. Направляющие реечные стойки 16 находятся в зацеплении с шестернями 8 через паразитные шестерни 17, установленные на крюнштейнах 18 и 19, на которых смонтированы также свободно вращающиеся на осях направляющие ролики 20 (фиг.З), Дпя приема; груза на раме устройства 1 приварены направляющие уголки 21 (фиг.1).
Перегрузочное устройство работает следующим образом. Груз g таре устанавливается Каретко-оператором 0 направляющие уголки 21, при этом передающая секция 3 находится в нижнем крайнем положении. После выхода грузоподъемного механизма каретки-оператора из зоны дейслвия перегрузочного устройства, срабатывает привод-2 передающей секции 3. Паразитные шестерни 17, контактируя с направляющими реечными стойками 16, передают вращение шестерням 8, которые заводят плоские спиральные пружины 9, так как роликовые упоры 4,5 и 6 под воздействием двухплечей собачки 14 находятся в заторможенном состоянии. При прохождении уровня горизонтальных полок направляющих уголков 21 передающий стол, 3 снимает с них груз 22 и поднимает его до уровня грузонесущей ветви конвейера 23. При этом упор 15 воздействует на двуплечую собачку 14, вьшодит ее из зацепления с храповым колесом 13. Роликовые оси 4,5 и 6 растормаживаются, и под воздействием
ааведенных Ш аспп чатых сг1И)альн1,1Х Г1ружит{ 9 и гибкой связи 1 начинают вращаться, передвигая груз 22 в сторону конвейера 23. Параметры пластинчатых спиральных пружин 9 подбираются таким образом, чтобы скорость перемещения груза на перегрузочном устройстве была синхронизирована со скоростью конвейера 23. После передачи груза 23 на конвейер 23 передающая секция 3 под воздействием привода 2 возвращается в нижнее исходное положение. Изменение направления выдачи груза достигается разворотом передающей секции, а также перестановкой реечных направляющих и упора.
Применение устройства в линии д.чя межоперационной транспортировки деталей обеспечивает передачу тары с грузом сводного конвейера на другой без установки допошинельного электропривода, упрощает конструкцию и повышает надежность работы всей линии.
Формула из (Обретения
Перегрузочное устройство для штучных грузов, включающее опору с установленным на Ней упором, передающую секцию, смоггшроваШ ную на раме и установленную на штанге подъемника, отличающееся тем, что, с целью обеспечения безударной передачи грузов на средсзва непрфывного транспорта с перемешением его в горизоптмьной плоскости, рама передающей секции снабжена зращаю1ЦИМИСЯ осями с дисками и звездочками на конце, связа1шыми между собой гибкой связью, а опора - реечной нагтравляшщей, при этом на одной из осей укреплена посредством спиральной плоской пружины гиестерия, взаимодействующая с реечной направляющей, а на другой - храповое колесо, причем на раме установлена двуплечая собачка, взаимодигствующая с храповым колесом и с упором.
Источники информации, принятые во внимание при зкспертизе
1.Авторское свиде1ельсгво СССР № 501031, кл. В 65 G 47/52, 1971.
2.Авторское свидетельство СССР
У 122428, кл. В 65 G 47/54, 1958 (прототип).
20 19
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство для штучных грузов | 1982 |
|
SU1046184A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2009 |
|
RU2410315C1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для пакетирования тарно-штучных грузов | 1977 |
|
SU686960A1 |
| Устройство для поштучной передачи грузов | 1977 |
|
SU656937A1 |
| Поворотное устройство | 1989 |
|
SU1699877A1 |
| АВТОМАТИЗИРОВАННОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2085461C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1972 |
|
SU436000A1 |
У
23
А-А
а.г.
26
