Од
со
00 00 С)
Изобретение относится к электротехнике и может быть использовано для управления механизмами с упругими связями, например манипулятора- ми.
Цель изобретения - улучшение стабилизации скорости вращения электродвигателя и повьшение качества регулирования.
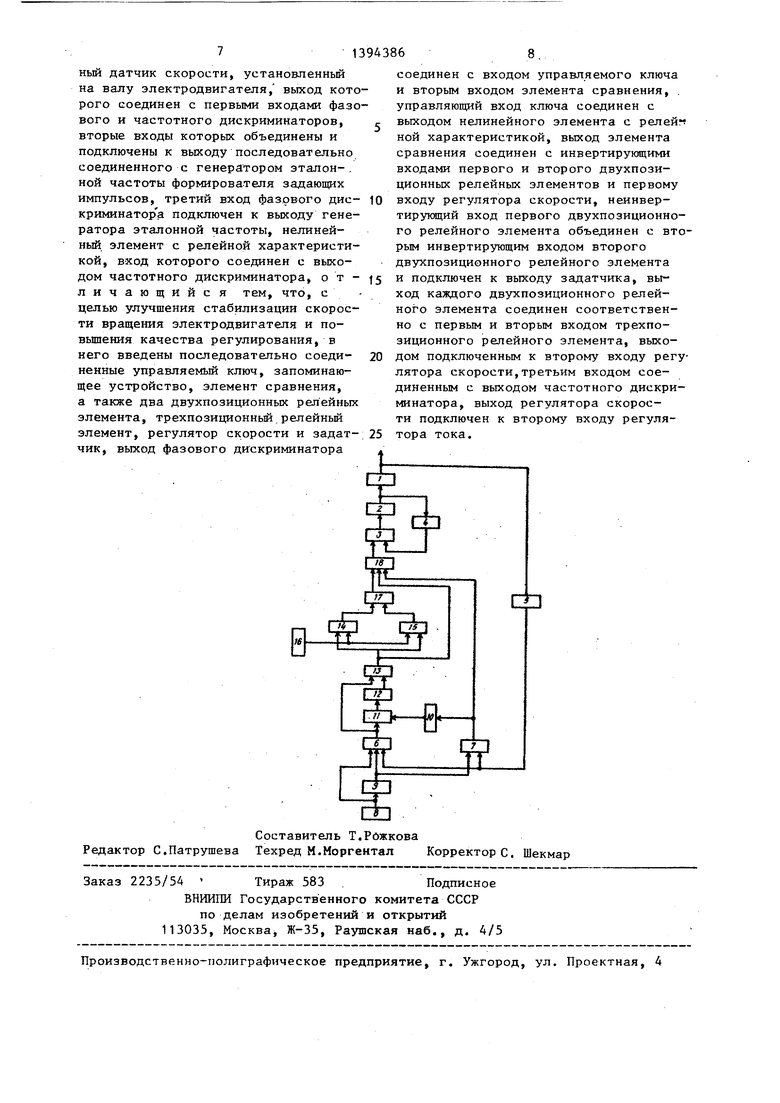
На чертеже представлена функциональная схема устройства.
Электропривод содержит электродвигатель 1, якорная обмотка которого подключена к выходу блока 2 уп- равления электродвигателем. Вход блока 2 управления соединен с вькодом регулятора 3 тока, входом подключенным к выходу датчика 4 тока якоря электродвигателя. На валу электро- двигателя 1 установлен импульсный ; датчик 5 скорости, вькод которого подключен к первым входам фазового и частотного дискриминаторов 6 и 7. Вторые входы фазового и частотного дискриминаторов 6 и. 7 объединены и подключены к выходу последовательно соединенного с генератором 8 эталонной частоты формирователя 9 за- даклцих импульсов. Третий вход фазо- вого дискриминатора 6 подключен к выходу генератора 8 эталонной час- . тоты,- а выход частотного дискриминатора 9 соединен с входом нелинейного элемента 10 с релейной характе- ристикой. Кроме того, электропривод содержит последовательно соединенные управляемый ключ 11, запоминающее устройство 12, элемент 13 сравнения. Выход фазового дискриминатора 6 сое- дивен с входом управляемого ключа 11 и вторым входом элемента 13 сравнения. Управляющий вход ключа 11 соединен с выходом нелинейного элемента 10 с релейной характеристикой. Выход элемента 13 сравнения подключен к инвертирующим входам первого и второго двухпозиционных релейных элементов 14 и 15. Неинвертирующий вход первого двухпозиционного релейного элемента 14 .объединен с вторым инвертирующим входом второго двухпозиционного релейного элемента 15 и подключен к выходу задатчика 16. Выход каждого двухпозиционного релейного эле- мента 14 и 15 соединен соответственно с первым и вторым входом трехпо- зиционного релейного элемента 17, выход которого подключен к второму
входу регулятора 18 скорости. Третий вход регулятора 18 скорости сое-/ динен с выходом частотного дискриминатора 7,. а второй вход регулятора 3 тока подключен к выходу регулятора 18 скорости.
Электропривод представляет собой систему астатического дискретного регулирования скорости вращения электродвигателя постоянного тока, основанную на принципе использования двух каналов управления: грубого канала автоматической синхронизации скорости электропривода по сигналу ошибки скорости и точного канала стабилизации фазового сдвига каждого импульса с импульсного датчика скорости относительно каждого импульса задающего сигнала.
Электропривод работает следующим образом.
Формирователь 9 задающих импульсов формирует в соответствии с заданной скоростью из последовательности импульсов эталонной частоты fo« поступающей с генератора 8 эталонной частоты, последовательность импульсов частоты задания fj. Последовательности импульсов частоты задания ЕЗ и частоты импульсного датчика 5 скорости f поступают на входы.фазового 6 и частотного 7 дискриминаторов. Фазовый дискриминатор 6, на вход которого также поступает последовательность импульсов эталонной частоты f, формирует сигнал Utf, пропорциональный текущему фазовому сдвигу на интервале l/fj каждого импульса, поступающего с импульсного датчика 5 скорости, относительно каждого импульса, поступающего с формирователя 9 задающих импульсов. Частотный дискриминатор 7 формирует сигнал , пропорциональньм разности частот /3f f - f-r, а следовательно, и ошибке в скорости, т.е.
U(j К- 4w.
Сигнал Uj(j поступает на вход регулятора 18 скорости и вход нелинейного элемента 10 с релейной характеристикой и зоной нечувствительности, который построен таким образом, что при
IU
а LJ
управления системой
( йи)зу определяется
на его выходе формируется сигнал, замыкающий управляющий кЛюч 11. При
u.w
на выходе нелинейного элемента 10 с релейной характеристикой формируется сигнал, размыкающий ключ 11. Таким образом, при Е ключ 11 замкнут и сигнал с выхода фазового дискриминатора 6 поступает на вход запоминающего устройства 12 и вос- производатся на его выходе, т.е. при этом,
и
ЗА
и
f
где - сигнал на выходе запоминающего устройства 12.
Сигнал и( с выхода фазового дискриминатора 6 и сигнал и 3V с выхода запо- минакнцего устройства 12 поступают на входы элемента 13 сравнения, на выходе которого формируется сигнал
ли
U.I/- УЗ Этот сигнал поступает на инвертируницие входы двухпозиционных релейных элементов 14 и 15 и на вход регулятора 18 скорости. Двухпозиционные релейные элементы 14 -и 15 формируют соответственно, сигналы
и, A-sign(q - V(f) , и , A-sign(-q - ли,),
где q - сигнал, формируемый на выходе задатчика 16, представляющего собой источник постоянного сигнала и поступающий на неинвертирующий вход первого двухпозиционного релейного элемента 14 и инвертирующий вход второго друхпозиционного релейного элемента 15. Сигналы U;, и U с .вь1ходов двухпозиционных релейных элементов 14 и 15 поступают на вход трехпози- ционного релейного элемента 17, на выходе которого формируется сигнал
Г в sign (и, + и) I при |и 1+ EI ;
О при |и, + и, I : Е, ,
Е,- зона нечувствительности
релейного элемента 17, опре
деляемая неточностью формирования сигналов и, и и,, дрейфом нуля и т.д., В - амплитуда сигнала Uj, формируемого на выходе фазового дискриминатора 6.
Сигнал Из поступает на вход регулятора 18 скорости.
Таким образом, при значительной ошибке в скорости, т.е. при пуске или торможении, когда вьтолняется условие |Ujt(7E, ключ 11 замкнут и формируются следуклцие сигналы
Uj,
/1U( U(f - U3., 0,
и , A- sign( A;
и 5 A-sign(-q) -A;
U, 0.
Следовательно, при этом на входе регулятора 18 скорости только сигнал лш О и регулятор 18 скорости формирует на выходе сигнал U с (ли) , определяемый заложенным в него законом управления. Этот сигнал поступает на вход регулятора 3 тока и реализуется работа грубого канала, то
есть управление по ошибке скорости электропривода при ограничении в пусковых режимах тока электродвигателя 1, Заложенный в регуляторе 18 скорости алгоритм управления позволяет
осуществлять не только быстрьй разгон электропривода, но и стабилизацию текущего значения скорости на уровне задания, облегчая тем самым захват управления точным, каналом.
При достижении в процессе разгона или торможения окрестности заданной скорости, т.е. при выполнении условий lUj I , ключ 11 размыкается, и на выходе запоминающего устрой- 45 ства 12 фиксируется значение сигнала и 15 и соответствующее сигналу и в момент размыкания ключа 11. Например, при разгоне формируются следующие сигналы:
УЗУ и$;
ли Ut,-Ua( UirU$ О,
и, и и.
A-sign(q-dU() А; AeiRnC-q-iJUi) -А; 0.
Полагаем, что | ли if rq. Следовательно, при этом на вход регулятора 18 скорости поступают сигналы О
513
.}( О и регулятор скорости формирует на выходе сигнал
и фСли, dtj),
т.е. электропривод переходит на реализацию работы точного канала заключающегося в ликвидации ошибки ЛИ ц, а следовательно, и стабилизации фа- зового сдвига между импульсами задающего сигнала и импульсами, поступающими с импульсного датчика 5 скорости. В данном электроприводе в любой момент времени включения точного канала при 4 и; О будет , следовательно, неоднозначности в формируемом сигнале управления здесь не происходит и управление всегда вырабатывается таким, чтобы ликвидйрова- лась ошибка по скорости, т.е. ложных включений, приводящих к возрастанию ощибки 4W, как это имеет место у известных систем, не происходит. Отметим также, что при работе точного канала нет необходимости в отключении от входа регулятора скорости сигнала и(), пропорционального ошибк по скорости 4(0, так как этот сигнал пропорционален производной от сигнал ли (f и может быть использован в формируемом в регуляторе скорости алгоритме как стабилизирующий сигнал. Граница опасной зоны, т.е. зоны на концах периода фазы ,в пределах кото- рой ошибка по скорости не успевает ликвидироваться, определяет устанавливаемое значение сигнала q, поступающего с выхода задатчика 16 на вхо ды двухпозиционных релейных злемен- тов 14 и 15. Пусть и момент
0,5В - q и /0,5В, q 0,5В Если в пределах периода фазы ошибка по скорости не ликвидировалась, то происходит скачок сигнала U i и он становится равным
иц,,5В.
В этом случае формируются следующие сигналы
изу и
ли 1| . этом
-В : 411 t -B+q, I uV if I q, Ui Asip-.nCq-uUi) +A;
и.
Asign(-q-aUcf) +A; Bsign(Ui+U,) B.
Следовательно, в данном случае на вход регулятора 18 скорости поступают сигналы и 0,4Uy, Ua В. При этом
О
и 3+ Ut q.
т.е. результирующий сигнал, эквива- лентньй ошибке по фазе, останется положительным, следовательно, ложной команды на торможение электродвига,- теля регулятором 18 скорости не будет выдано. Регулятор скорости при этом формирует на выходе сигнал
и tf(flU( + Uj, лш).
Таким образом, в электроприводе исключается за счет фиксации фазового рассогласования импульсов датчика 5 и задающих импульсов на уровне значения,, соответствующего моменту перехода на точный канал, выдача ложных команд на разгон и торможение, расширяется в зоне работы точного канала линейный участок характеристики фазового дискриминатора и обеспечивается возможность формирования сложных алгоритмов регулирования скорости при работе как точного, так и грубого каналов. Все это препятствует возникновению биений и облегчает процесс втягивания в синхронизм, расширяет полосу захвата управления системой точным каналом, повьшает устойчивость процесса синхронизации и работы точного канала, что позволяет использовать электропривод для высокоточной стабилизации и регулирования по различным законам скорости механизмов с упругими связями, например, манипуляторов, имитаторов и других многомассовых механических систем. I Формула изобретения
Стабилизированный электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к выходу блока управления электродвигателем, входом соединенным с выходом регулятора тока, вход которого подключен к выходу тока якоря электродвигателя, импульс713
ньй датчик скорости, установленньй на валу электродвигателя, выход которого соединен с первыми входами фазового и частотного дискриминаторов, вторые входы которых объединены и подключены к выходу последовательно соединенного с генератором эталон-. ной частоты формирователя задающих импульсов, третий вход фазового дис- криминатор а подключен к выходу генератора эталонной частоты, нелинейный, элемент с релейной характеристикой, вход которого соединен с выходом частотного дискриминатора, о т - личающийся тем, что, с целью улучшения стабилизации скорости вращения электродвигателя и по- вьшения качества регулирования, в него введены последовательно соеди- ненные управляемый ключ, запоминающее устройство, элемент сравнения, а также два двухпозиционных релейных элемента, трехпозиционньй.релейный элемент, регулятор скорости и задатчик, выход фазового дискриминатора
6
8 ,
соединен с входом управляемого ключа и вторым входом элемента сравнения, управляющий вход ключа соединен с выходом нелинейного элемента с релейной характеристикой, выход элемента сравнения соединен с инвертирующими входами первого и второго двухпозиционных релейных элементов и первому входу регулятора скорости, неинвер- тирукнций вход первого двухпозиционно- го релейного элемента объединен с втрым инвертирующим входом второго двухпозиционного релейного элемента и подключен к выходу задатчика, выход каждого двухпозиционного релейного элемента соединен соответственно с первым и вторым входом трехпо- зиционного релейного элемента, выходом подключенным к второму входу реглятора скорости,третьим входом сое- диненным с выходом частотного дискриминатора, выход регулятора скорости подключен к второму входу регулятора тока.

| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Электропривод постоянного тока | 1987 |
|
SU1515311A1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
Из.обретение относится к электротехнике и м.б. использовано для управления механизмами с упругими связями, например манипуляторами. Цель изобретения - улучшение стабилизации скорости вращения электродвигателя и повьшение качества регулирования. Электропривод содержит грубый канал автоматической синхронизации по сигналу ошибки скорости и точный канал стабилизации фазового сдвига каждо- го импульса с датчика скорости относительно каждого импульса задающего сигнала. За счет фиксации фазового рассогласования в момент перехода на точный канал исключается выдача ложных команд на разгон и торможение, распиряется линейный участок характеристики фазового дискриминатора в зоне работы точного канала, что пре пятствует возникновению биений, облегчает процесс втягивания в синхронизм, расширяет полосу захвата управления системой точным каналом и повьш1ает устойчивость процесса синхронизации и работы точного канала. 1 ил. (Л с
| Трахтенберг P.M | |||
| Импульсные астатические системы электропривода с дискретным управлением | |||
| М.: Энергоиз- дат, 1982, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Башарин А.В.., Новиков В.А., Соколовский Г.Г | |||
| Управление .электроприводами | |||
| Учебное пособие для вузов | |||
| Л.: Энергоиздат, 1982, с | |||
| Водяные лыжи | 1919 |
|
SU181A1 |
