-/
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Безлюфтовый конический дифференциал | 1981 |
|
SU1004691A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2252347C2 |
| БЕЗЛЮФТОВЫЙ ДИФФЕРЕНЦИАЛ С КОНИЧЕСКИМ ИЛИ ЦИЛИНДРО-КОНИЧЕСКИМ ЗАЦЕПЛЕНИЕМ | 1970 |
|
SU419667A1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2033542C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ | 1990 |
|
RU2025625C1 |
| МНОГОРЯДНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2009 |
|
RU2424458C2 |
| Цилиндрический самоблокирующийся дифференциал | 1984 |
|
SU1194717A1 |
| КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ВЫСОКОМОМЕНТНОГО ВАРИАТОРА | 2003 |
|
RU2263240C2 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПРОТИВОБУКСУЮЩАЯ ПЕРЕДАЧА | 1993 |
|
RU2091645C1 |
Изобретение относится к машиностроению. Целью изобретения является повышение надежности дифференциала путем устранения дисбаланса водила. Поворот на угол об вспомогательного водила 7, компенсирующий люфты в зацеплении центральньгх колес 3 и 4 с сателлитами 5 и 6, вызывает смещение противовесов 13, взаимодействующих с кулачками 15, и уравновешивание возникающего дисбаланса. 3 ил.
со ел с |
(pueZ
Изобретение относится к машиностроению.
Целью изобретения является повышение надежности дифференциала путем устранения дисбаланса водила.
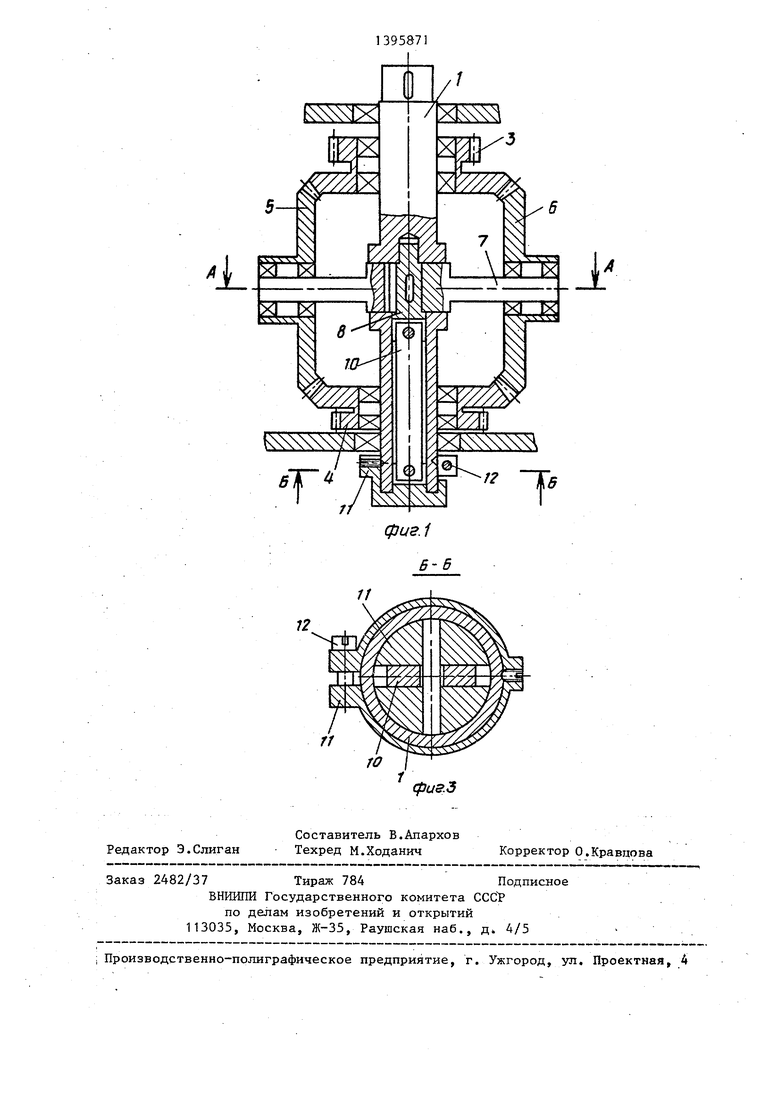
На фиг.1 схематически изображен безлюфтовый конический дифференциал, продольный разрез; йа фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1.Безлюфтовый конический дифференциал содержит основное водило 1, имеющее в средней части полость 2, установленные на нем посредством подшип- НИКОВ центральные колеса 3 и 4, входящие в зацепление с сателлитами 5 и б, размещенные соответственно на основном 1 и вспомогательном 7 води- лах. Последнее установлено на оси 8 посредством шпонки 9 в полости 2 основного водила 1 с возможностью, поворота относительно его оси и связано с торсионом 10, другой конец которого закреплен на гайке 11, закреплен- ной стопором 12 на основном водиле 1. В последнем с возможностью поступательного перемещения установлены противовесы 13, одни концы которых поджаты пружинами 14, а другие контакти- РЗПОТ с кулачками 15, выполненными на конце вспомогательного водила 7. Угол профиля кулачков 15, масса противовесов 13 и их размеры, параметры тор- сиона 10 рассчитьшаются таким обра- зом, чтобы центр тяжести дифференциала совпадал с осью вращения основного водила 1 при любом угловом поло- жении вспомогательного во.дила .7 (в пределах от О до 10 ).
Безлюфтовый конический дифференциал работает следующим образом.
Вращение подводится к центральным колесам 3 и 4 и суммируется на основном водиле 1. Люфты в зацеплениях центральных колес с сателлитами 5 и 6 выбираются за счет поджатия сателлита 6 в окружном- направлении. Усилие поджатия регулируется гайкой 11. При этом чем больше угол поворота об : вспомогательного водила 7, тем больше смещение центра тяжести дифференциала. Взаимодействие кулачков 15 с противовесами 13 позволяет вновь вернуть центр тяжести в исходное положение, исключая возникший дисбаланс.
Безлюфтовый конический дифференциал надежен в работе за счет автоматического ис1спючения дисбаланса. Формула изобретения
Безлюфтовый конический дифференциал, содержащий центральные колеса, основное водило, имеющее внутреннюю полость, вспомогательное водило, установленное в полости основного с возможностью поворота относительно его оси, и саттелиты, размещенные соответственно на.основном и вспомогательном водилах, о-тличаю- щ и и с я тем, что, с целью повышения надежности путем устранения дисбаланса водила, на конце вспомогательного водила выполнены кулачки, а дифференциал снабжен двумя контактирующими с кулачками противовесами, установленными в основном водиле с возможностью поступательного перемещения и упруго поджатыми в радиальном направлении.
П
139587
(f}uff,3
| БЕЗЛЮФТОВЫЙ ДИФФЕРЕНЦИАЛ С КОНИЧЕСКИМ ИЛИ ЦИЛИНДРО-КОНИЧЕСКИМ ЗАЦЕПЛЕНИЕМ | 1970 |
|
SU419667A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
