00
со
о
tS
4;:
Изобретение.относится к автоматике и вычислительной технике и может быть использовано для программнох о управления технологнческими агрегата ми или процессами о
Цель изобретения - обеспечение плавного снижения скорости исполни-- органов при выходе из строя блока задания программы
На чертеже приведена структурная схема устройства программного управления .
Устройство содержит блок 1 задания программы (управляюЕ ую ЦВМ) и гто числу h координат управляемого агрегата триггер 2 знака, элемент 3 запрета и последовательно соединенные вычитающий счетчик 4 импульса, и(ифроаналоговый преобразователь 5, усилитель 6 мощности,, двигатель 7, исполнительный орган 8 и кодовый датчик 9 положения., первьп элемент И 10, элемент ИЛИ 11 и последовательно соединенные генератор 12 импуль- сов, счетчик-делитель 13, триггер 14 признака аварии и второй элемент И 15о В качестве блока 1 задания про Г раммы используется микро-ЭВМ Элек- троника-бОМ ,
Сущность изобретения заключается В следующем„
Признаком неисправности управляющего блока 1 является нарушение вьща- чи управляющей информацией из блока
Iзадания программ1 1 в каждый канал управления. Для обнаружения такой аварийной ситуации используетсй совокупность из генератора 12 импульсов, счетчика-делителя 13., элемента ИЛИ
IIи триггера 14 признака аварии„ Эта совокупность функциональных блоков обеспечивает фор шрование сигнала признака аварии, если интервал выдачи управляющей информации из блока
1 превь1сит допустимое значение, ,Цля выполнения плавного снижения скорости движения исполнительных органов многокоординатного аг регата в пред
лагаемом устройстве код скорости згг- даваемого движения поступает из блока 1 не непосредственно на вход циф- роаналогового преобразователя, а предварительнс заносится в вычитающий счетчик 4, уменг.тение. содержимого которого до нулевого зн:ачения осуществляется при обнаружении аварийной ситуации
5
Q
0
5
Устройство.программного управления работает сл едующим образом.
Заданная программа движения исполнительных органов многокоординатного технологическогого агрегата хранится в памяти блока 1, а ее воспроизведение осуществляется по сигналам встроенного в блок i таймера (не показан) . По каждому сигналу таймера, формируемому периодически с постоянным интервалом 1} , блок 1 задания программы формирует код управляющего воздействия для одной или нескольких координат В общем случае период формирования управляющих воздействий для каждой координаты выбирается исходя из динамических характеристик соответствующего исполнительного органа,,
При формировании управляющего воздействия блок 1 считывает с выхода кодового датчика информацию о фактическом положении, интерполирует код заданного по программе текущего положения исполнительного органа, определяет ошибку управления и рассчитывает по тому или инрму закону управления код управляющего воздействия.
Абсолютная величина управляющего воздействия определяет скорость движения исполнительного органа, а знак - направление его движения„ Код абсолютной величины управляющего воздействия поступает из блока 1 задания программы на установочный вход вычитающего счетчика 4, а на установленный вход триггера 2 знака блок 1 выдает сигнал признака направления движения. Занесение кода управляющего воздействия в вычитающий счетчик 4 и переключение триггера 2 знака ствляется по сигналу синхронизации, поступающему из блока 1 на стробирую- щие входы указанных функциональных блоков. Коды состояния вычитающего счетчика 4 и триггера 2 знака поступают на входы цифроаналогового преобразователя 5, на выходе которого формируется аналоговый сигнал соответствующей полярности. Этот сигнал усиливается по мощности усилителем 6 и поступает на вход двигателя 7, определяя скорость и направление его вращения и, следовательно, скорость , и направления движения исполнительного органа 8, положение которого измеряется кодовым датчиком 9.
Сиг налы сннхроиизации выдачи кодов управляющих воздействий по всем координатам поступают через элемент ИЛИ 11 на обнуляющий вход счетчика- делителя 13, который до этого момен- та заполняется выходными сигналами генератора 12 импульсов. Частота генератора 12 импульсов и разрядность счетчика-делителя 13 подбираются таким образом, чтобы переполнение счетчика-делителя 13 происходило за интервал времени, несколько превышающий период формирования управляющих воз
действий в устройстве программного управления. Сигналы синхронизации с выхода элемента ИЛИ 11 одновременно поступают на второй вход триггера 14 признака аварии,поддерживая его в нулевом состоянии при нормальной
работе блока 1.
Если блок 1 выходит из строя, то он прекращает периодическую вьщачу управляющих воздействий, о чем свидетельствует отсутствие сигналов синхронизации на его выходах и, следовательно, на выходе элемента ИЛИ 11. В этом случае счетчик-делитель
13переполняется, на его первом выходе формируется сигнал, поступающий на первый вход триггера 14 признака аварии и переводящий его в единичное состояние. Выходной сигнал триггера
14признака аварии подготавливает второй элемент И 15 для прохождения через него импульсов с второго выхо- да счетчика-делителя 13 на первые входы элементов 3 запрета всех управляемых координат. Частота сигналов, формируемых на втором выходе счетчика-делителя 13, выбирается исходя из требуемой плавности снижения скорости исполнительных органов управляемого агрегата. Эти сигналы через каждьй элемент 3 запрета поступают
на счетньш вход соответствующего вычитающего счетчика 4, уменьщая его содержимое до тех пор, пока на втором выходе вычитающего счетчика 4 не сформируется сигнал признака нулевого состояния„ Этот сигнал запирает соответствующий элемент 3 запрета и одновременно поступает на вход . первого элемента И 10, Уменьшение содержимого вычитающих счетчиков 4 обеспечивает через функциональные блоки 5-7 плавное снижение до нулевого значения скорости- движения исполнительных органов управляемого агре
0
s
0
5
0
5
гата до тех пор, пока вычитающие счетчики 4 всех управляемых координат не обнуляются. В этом случае совпадение сигналов обнуления вычитающих счетчиков 4 и сигнала признака аварии на входах первого элемента И 10 вызывает появление на его выходе сигнала, поступающего на вторые входы всех усилителей мощности 6 и выключающего электроприводы всех координат управляемого агрегата.
Формула изобретения
Устройство для программного управления, содержащее блок задания программы и по числу координат управляемого агрегата последовательно сое- динен)ше цифроаналоговый преобразователь, усилитель мощности, двигатель, исполнительный орган и кодовый датчик положения, выход которого соединен с соответствующим входом блока задания программы, о т л и ч а ю - щ е е с я тем, что, с целью обеспечения плавного снижения скорости исполнительных органов при выходе из строя блока задания программы, в него введены по числу координат управ- лемого агрегата вычитающий счетчик импульсов, триггер знака и элемент запрета, а также генератор импульсов, счетчик-делитель, триггер признака аварии, первый и второй элементы И и элемент ИЛИ, входы которого соединены со стробирующими входами вычитающего счетчика импульсов и триггера знака каждой координаты и..с соответ- ствукщими синхронизирующими выходами блока задания программы, выход генератора импульсов соединен с информационным входом счетчика-делителя, обнуляющий вход которого соединен с выходом элемента ИЛИ и с первым управляющим входом триггера признака аварии, первый выход счетчика-делителя соединен с первым входом первого элемента И, второй выход - с вторым управляющим входом триггера признака аварии, прямой выход которого подключен к второму входу первого элемента И и к первому входу второго элемента И, вторые входы которого соединены с первым выходом вычитающего счетчика импульсов каждой координаты и с первым входом элемента запрета, второй вход которого подключен к выходу первого элемента И, а выход - к счетному входу вычитающего
5 1396124
счетчика импульсов, второй выход ко- ка задания программы, упрайляющий
торого соединен с первым входом циф выход которого соединен с установочроаналогового преобразователя, под-ным входом вычитающего счетчика имк.точенного вторым входом к выходупульсов, выход второго элемента И
триггера знака, второй вход которого подключен к второму входу усилитешя
соединен с установочным выходом бло-мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоканального ввода цифровой информации | 1981 |
|
SU978135A1 |
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыМиСТАНКАМи | 1979 |
|
SU813377A1 |
| Устройство для управления много-КООРдиНАТНыМи ТЕХНОлОгичЕСКиМиАгРЕгАТАМи | 1978 |
|
SU811220A1 |
| Устройство для управления процессом намотки | 1986 |
|
SU1390618A1 |
| Устройство для программного управления | 1984 |
|
SU1215089A1 |
| Многоканальный интерполятор для программного управления многокоординатным станком | 1978 |
|
SU746429A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для дробления стружки | 1982 |
|
SU1103199A1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
Изобретение относится к автоматике и вычислительной технике и может использоваться для программного управления технологическими агрегатами или процессами Цепь изобретения - обеспечение плавного снижения скорости исполнительных, органов при выходе из строя блока задания прог граммы. Устройство для программного управления содержит блок задания программы 1, генератор импульсов 12, счетчик-делитель 13, триггер признака аварии 14, элемент ИЛИ 1, элементы И 15, 10 и в каждом канале координат вычитакиций счетчик 4, триггер знака 2, элемент запрета 3, цифроана- логовын преобразователь 5, усилитель мощности 6, двигатель 7, исполнительный орган 8 и кодовый датчик 9. Данное устройство обеспечивает безопасность управления технологическим процессом при выходе из строя блока задания программы (управляющей ЦВМ) за счет обеспечения плавного снижения скорости при остановке исполнительных органов многокоординатного агрегата. 1 ил. (Л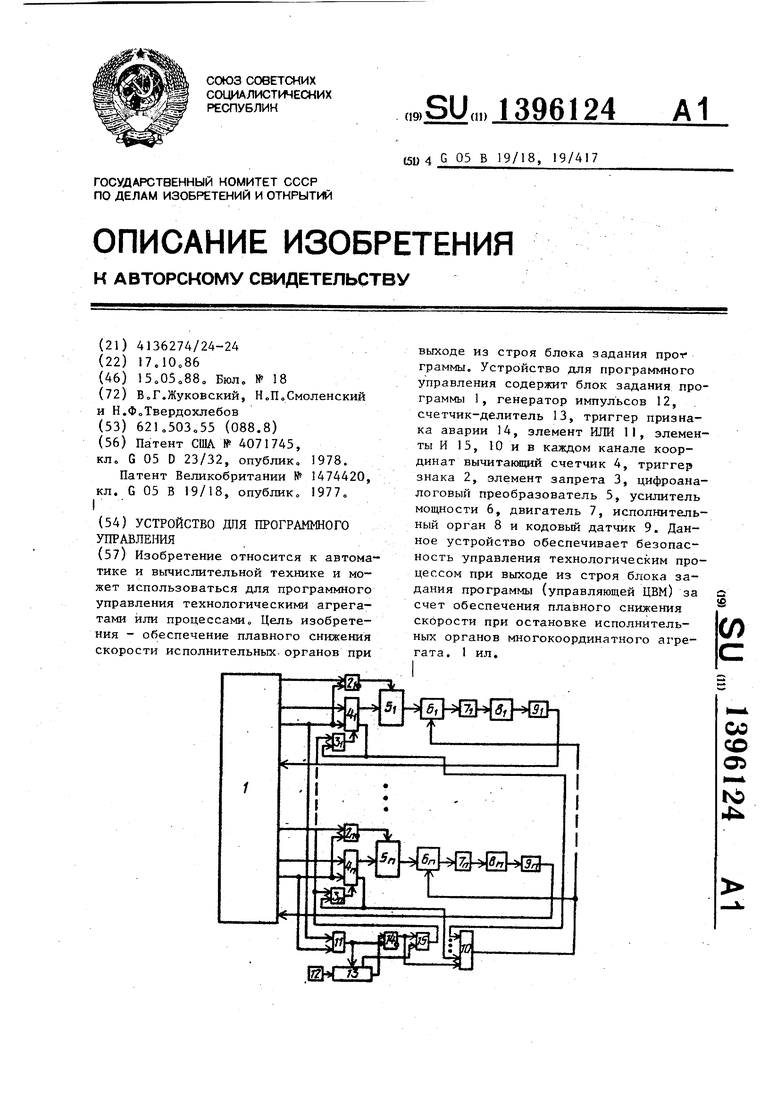
| Патент США 4071745, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Опорный узел вращающейся барабанной печи | 1986 |
|
SU1474420A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Г | |||
