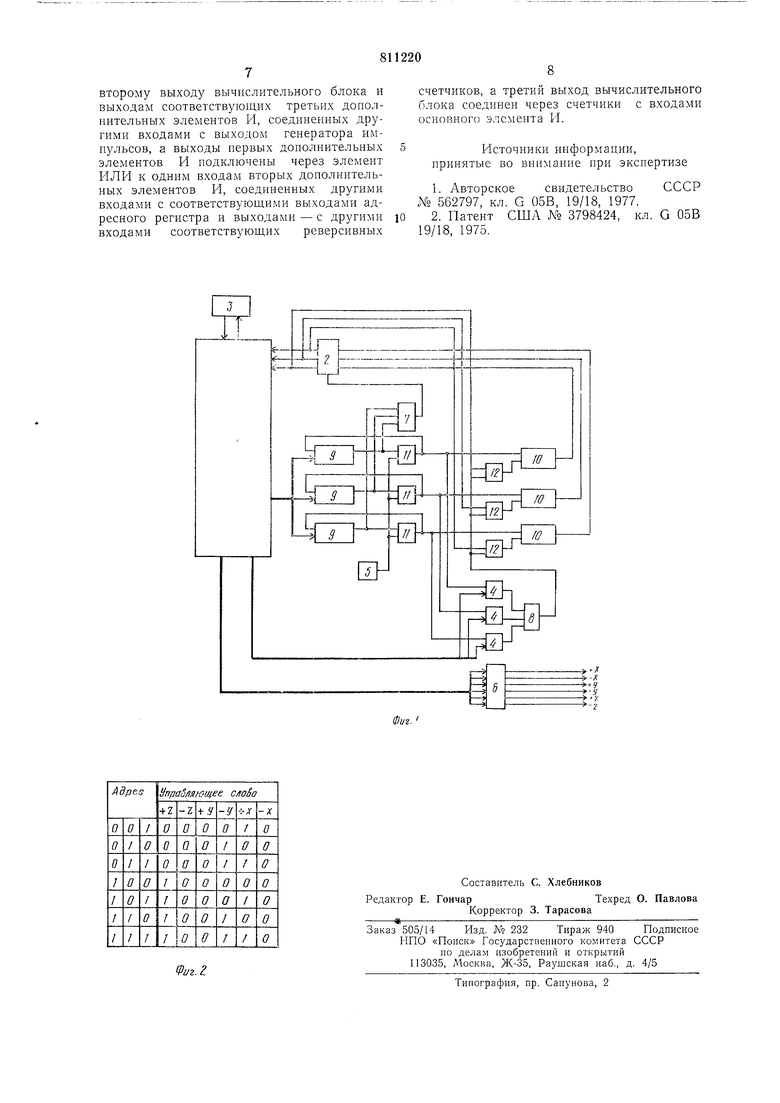
(выходной) регистр 6, основной элемент И 7, элемент 1-1ЛИ 8, счетчики 9, реверсивные счетчнки 10, соответственно третьи и вторые донолнительные элементы И И и 12. Устройство работает следующим образом. Унравляюш,ие импульсы с выходного регистра 6 формируются нри постуилении на его вход из ЦВМ 1 управляющих слов из таблицы, которая составляется ЦВМ 1 для каждого кадра программы, содержащего заданные величнны прнращения положения по координатам (Д, АУ, AZ), знаки ириращения (предположим, что приращения иоложеиия по координатам X }i Z имеют знак плюс, а но координатам У - минус) и время отработки кадра Тк. Для принятых исходных данных таблица управляющих слов приведена на фиг. 2. Каждые два разряда в управляющем слове закреплены за координатами унравляемого технологического агрегата в следующей .последовательности. Цервые два разряда - за координатой Z, вторые - за координатои F, третьи - за коордииатами X. Наличие единицы в первом из каждых двух разрядов является иризнаком иеремещения но координате на единицу дискретности в иоло}кительиом направлении, наличие единицы во второ.м из двух разрядов является признаком перемещения в отрицательном иаправлении. Таблица управляющих слов состоит из двух столбцов. Второй столбец содержит управляющие слова, иредставляющие собой возможные сочетания управляющих воздействий ио коордииатам с учетом знаков приращений. Число возможных сочетаний управляющих слов равно 21-1, где i - количество координат движения. В нашем случае число управляющих слов равно семи. Элементами первого столбца таблицы являются адреса уиравляющих слов (в нашем случае трехразрядные числа). Адреса формируются следующим образом: если управляющее слово содержит признак перемещения ио координатам X, то в младщий разряд адреса занисывается единица, если ио координате У - то единица записывается во второй разряд, если ио коордииате Z - то в третий. При интериоляции кадра программы количество управляющих слов, иодаваемых иа выход системы, равно величине ириращеиия положения ио координате, для которой оно является максимальным ио сравнению с остальными, а период выдачи управляющих слов равен времени отработки кадра, делеииому иа величину максимального из заданных приращеиий в кадре. Моменты выдачи уиравляюнхих слов оиределяются по снгиалам таймера 3, а выбор того или иного управляющего слова из таблнцы на каждом щаге интерполяции осуществляется в соответствии с адресом, выставляе:мым иа выходе адресного регистра 2. Формирование кода адреса производится путем вычисления в реверсивных счетчиках 10 значений оценочных функций для каждой координаты. Каждая из иарал.чельиых ценей, состоящих из последовательно соединенных счетчика 9, третьего дополнительного элемента И 11 и реверсивиого счетчика 10, закреплена за определеииой коордииатой уиравляемого технологического агрегата. На выходе реверсивного счетчика 10 формируется сигнал логической единицы, если его содержание равно нли больще иуля. В начале отработки каждого кадра программы ЦВМ 1 определяет координату, имеющую максимальное приращение (предположим, что это АУ), вычисляет код таймера 3, соответствующий интервалу времени между выдачами управляющих слов, равному TK/AF и устанавливает устройство в исходное состояние (щины установки в исходиое состояние на фиг. 1 не иоказаны). При этом счетчики 9 и реверсивиые счетчики 10 обнуляются. При обнулении счетчиков 9 на их выходе формируются сигналы, поступающие на входы основного элемента И 7 ц входы третьих дополннтельных элементов Ц 11. Выходной сигнал элемента И 7 стробирует занесение единиц с выходов реверсивных счетчиков 10 в адресный регистр 2, выходные сигналы которого открывают вторые дополнительные элементы И 12. Выходные сигналы счетчиков 9 запирают третьи дополнительные элементы И 11. Одновременно но второй выходной щиие из ЦВМ 1 иостуиает сигнал признака координаты, имеющий .максимальное приращение, который открывает один из иервых дополнительных элементов PI 4, соединенный с выходом счетчика 9, закрепленного за координатой У (в нашем примере максимальное приращеиие имеет координата У). В общем случае максимальное приращение положения может иметь любая координата. На первом щаге интерполяции ЦВМ 1 запускает таймер 3, а в счетчики 9 в инверсном коде заносит абсолютиые величины приращений но координатам. При этом выходные сигналы обнуления счетчиков 9 енимаются и через открытые третьи дополнительные элементы И 11 с выхода генератора импульсов 5 на счетиые входы счетчиков 9 и суммирующие входы реверсивиых счетчиков 10 иачииают проходить импульсы. Одновременно выходные импульсы среднего из элементов И 11 через открытый первый дополнительный элемент И 4, элемент ИЛИ 8 н открытые вторые дополнительные элементы И 12 поступают на вычитающие вхоы реверсивных счетчиков 10. Импульсы через элемеиты И 11 будут проходить до ех пор, иока не обкулятся соответствую 1;ие счетчнки 9. После заверщения цикла ормирования адреса, признаком чего явяется обнуление всех счетчиков 9, в реверсивных счетчиках 10 получатся значения оценочных функций первого шага интерполяцииFx, -(Y+l) + , так как &. . Д7+ 1 -(AF+1)0; .:-(Ay+l) + , так как . Таким образом, на первом шаге интерполяции на установочных входах адресного регистра 2 сформируется двоичный код 010. Сигнал совпадения сигналов обнуления счетчиков 9 с выхода основного элемента И 7 стробирует занесение кода адреса первого унравляюшего слова в адресный регистр 2. После отработки таймером 3 заданиого интервала времени ЦВМ 1 по сигналу таймера 3 считывает код адреса и выдает по третьей выходной шине на вход выходного регистра 6 соответствующее управляюшее слово из таблицы. На выходе системы формируется импульс, поступающий по каналу У на вход соответствуюшего следящего привода. На втором шаге интерполяции процесс формирования адреса происходит аналогично, но теперь выходные сигналы адресного регистра 2 запрещают ирохождение импульсов на вычитающие входы реверсивных счетчиков 10 координат X к Z, поэтому в конце второго цикла формирования адреса в реверсивиых счетчиках 10 получатся значения оценочных функций, равные . .. + 1- 2Д + 1 - (АУ + 1); Fy. - 0; PZ, FZ, + AZ + 1 z 2AZ + 1 - (Л У + 1). В зависимости от знаков оценочных функций на выходе адресного регистра 2 формируется адрес второго управляющего слова, которое выдается на выход системы по второму сигналу таймера 3. Процесс выдачи управляющих слов иродоллсается до тех пор, пока число сигналов от таймера 3 не станет равным заданному приращенню но координате У, что является признаком отработки данного кадра. На каждом шаге интерполяции при вычислении значений оценочных функций выполняется следующее правило: если иа предыдущем шаге интерполяции значение оценочной функции было отрицательным, тона данном щаге интерполяции импульсы проходят только иа суммирующий вход соответствующего реверсивного счетчика 10, а если иа предыдущем щаге значение оценочной функции было равно или больще нуля. то импульсы проходят на оба входа реверсивного счетчпка 10, причем на суммирующий вход поступает число импульсов, равное приращенню положения по данной координате, увеличенному на едпнпцу, а на вычитающий вход - число импульсов, равное увеличенному на единицу приращению положения по коордпнате, для которой заданное прирап,ение положения в данном кадре имеет максимальное значение по сравнению с остальными. При отработке программы управления число командных импульсов на выходе системы по каждой коордпнате равно заданному в каждом кадре, а неравномерность их следования не превышает интервала вре.мени между выдачами управляющих слов. Для обеспечеппя согласованной работы по времени необходимо, чтобы процесс формироваппя адреса на каждом щаге интерполяции завершался раньше появления сигнала таймера 3. Для этого должно соблюдаться неравенство /r /MaKc(/V,,,,,+ l), где fr - частота генератора 5; /.макс - максимальная частота управляющих импульсов на выходе системы; Лмакс - максимальное значение задаваемых в кадре приращений положения по коордииате. Наличие в системе таймера 3, оиределяющего момент выдачи управляющих воздействий системой, позволяет простым преобразованием задаваемого ему кода варьировать скоростью отработки заданной программы и осуществлять разгон и торможеиие исполннтельных органов управляемого технологпческого агрегата по любому требуемому закону. Формула изобретения Устройство для управления многокоордипатными технологическими агрегатами, содержащее вычислительный блок, входы которого подключены к адресному регистру, соединенному одним входом с выходом элемеита И, а первый выход через исполнительный регистр иодключен к входам управляемых приводов, и генератор импульсов, отлпчающееся тем, что, с целью повышеиия точности устройства, оно содержит первые и вторые дополнительные элементы И по числу управляемых приводов, элемент ИЛИ и параллельные цепи по числу управляемых приводов, каждая из которых состоит из включепных последовательпо счетчика, третьего дополнительного элемепта И и реверсивного счетчика, выход которого соединен с соответствующим входом адресного регистра, причем иервые и вторые входы первых дополнительных элемептов И подключены соответственно ко
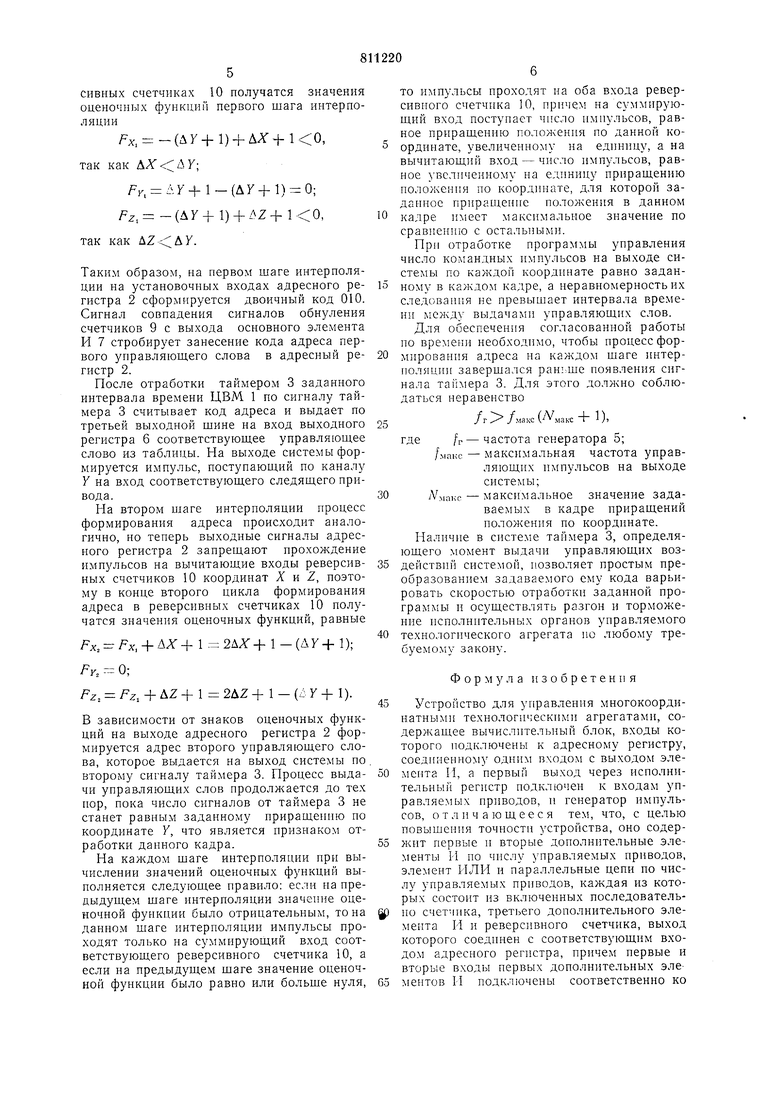
второму выходу вычислительного блока и выходам соответствующих третЕ их дополнительных элементов И, соединенных другими входами с выходом генератора имиульсов, а выходы иервых доиолиительных элементов И подключены через элемент ИЛИ к одним входам вторых дополнительных элементов И, соединенных другими входами с соответствующими выходами адресного регистра и выходами - с другими входами соответствующих реверсивных
счетчиков, а третий выход вычислительного блока соединен через счетчики с входами основного элемента И.
5Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 562797, кл. G 05В, 19/18, 1977. Ю 2. Патент США N 3798424, кл. G 05В 19/18, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыМиСТАНКАМи | 1979 |
|
SU813377A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для отображения гра-фичЕСКОй иНфОРМАции | 1978 |
|
SU813502A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1972 |
|
SU332438A1 |
| Устройство для управления многокоординатным оборудованием | 1987 |
|
SU1427334A1 |
| Устройство для управления процессом намотки | 1986 |
|
SU1390618A1 |
