JSJS
U
f$
4-7-Э-
12
Л
(О
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1988 |
|
SU1575285A2 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1399882A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1246317A1 |
Изобретение относится к электротехнике. Целью изобретения является расширение функциональных возможностей путем получения информации о зна чении сопротивления роторной обмотки асинхронного двигателя. Указанная цель достигается введением в устройство для определения координат асинхронного электродвигателя регулируе
й
й
I/
ал
i.
ос ;о
00 Ф
Ч
:
мого электропривода блока задания 16, последовательно соединенных фильтра 13, интегратора (И) 14 и сумматора (С) 15. Второй вход С 15 подключен к блоку задания 16. Выход С 15 соединен с дополнительными входами блока 6 вычисления составляющих вектора пото- косцепления ротора и блока 11 вычисления составляняцих вектора тока ста- тфра. Вход фильтра связан с выходом Формирователя 12 логических управляющих воздействий в контуре регулирования составляющих вектора потокосцеп- л(|ния ротора и вектора тока статора, нф котором формируется управляющее воздействие в виде фиктивной переменИ
Изобретение относится к электротехнике, а именно к устройствам определения координат асинхронного двигателя, и может быть использовано в регулируемом асинхронном электроприводе общепромьгашенного назначения.
Целью изобретения является расши- функциональньпс возможностей П7тем получения дополнительной информации о значении сопротивления роторной обмотки асинхронного двигателя.
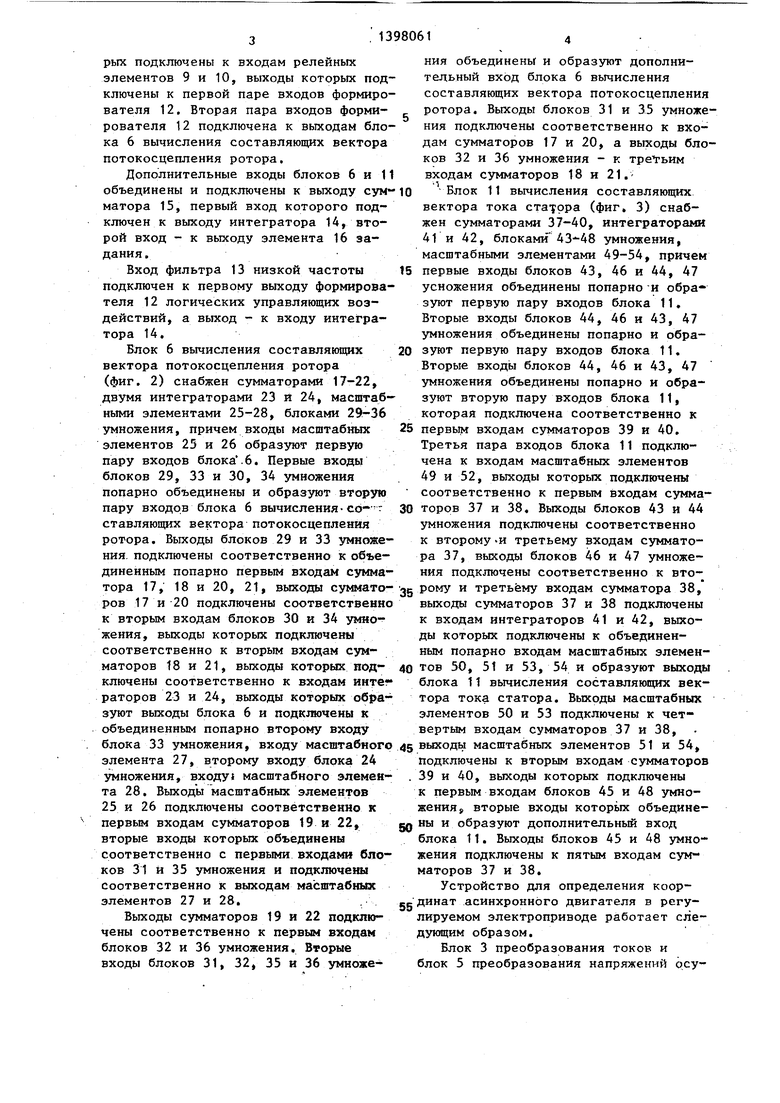
I На фиг. 1 представлена структурная с-кена устройства для определения ко- о: динат асинхронного двигателя регулируемого электропривода; на фиг. 2 - структурная схема блока вьгаисления составляющих вектора потокосцепления рЬтора; на фиг. 3 - структурная схема б;пока вычисления составляющих вектора тока статора.
Устройство для определения координат асинхронного двигателя 1 (фиг, 1) содержит датчики 2 фазных токов статора, подключенные выходами к входам блока 3 преобразователя токов, датчики 4 фазных напряжений статора, подключенные выходами к входам блока 5 преобразования напряжений, блок 6 вычисления составлякяцих вектора потокосцепления ротора с двумя парами входов и дополнительным входом, два элемента 7 и 8 сравнения, два релейных элемента 9 и 10, блок 11 вычисленой . Определение значения сопротивления роторной обмотки асинхронного двигателя 1 происходит в замкнутом контуре по среднему значению фиктивной переменной. Это среднее значение получается на выходе фильтра 13. К сигналу, поступающему с И 14, добавляется с элемента задания 16 каталожное значение сопротивления R ротора. При отклонении сопротивления роторной обмотки от RQ величина :# О и сигнал на выходе И 14 изменяется до тех пор, пока |Utp О, Тогда выходной сигнал С 15 совпадает со значением сопротивления асинхронного двигателя 1. 3 ил.
ния составляющих вектора тока статора с тремя парами входов и дополнительным входом, формирователь 12 логических управляющих воздействий в контурах регулирования составляющих вектора потокосцепления ротора и вектора тока статора, фильтр 13 низкой частоты, интегратор 14, сумматор 15 и элемент 16 задания.
0 Первая пара входов блока 6 вычисления составляющих вектора потоко- цепления ротора объединена пофазно с первыми входами элементов 7 и 8 сравнения и подключена к выходам бло5 ка 3 преобразования токов статора. Вторая пара входов блока 6 вычисления составляющих вектора потокосцепления ротора объединена пофазно с первой парой входов блока 11 вычисления
составляющих вектора тока статора и подключена соответственно к первому и второму вьгходам формирователя 12 логических управляющих воздействий, вторая входов блока 11 вычисления составлякицих вектора тока статора подключена к выходам блока 6 вычисления составляющих вектора потокосцепления ротора. Третья пара входов указанного блока 6 подключена к выходам блока 5 преобразования напряжений статора, а выходы блока 6 подключены к вторым входам соответствующих элементов 7 и 8 сравнения, выходы кото5
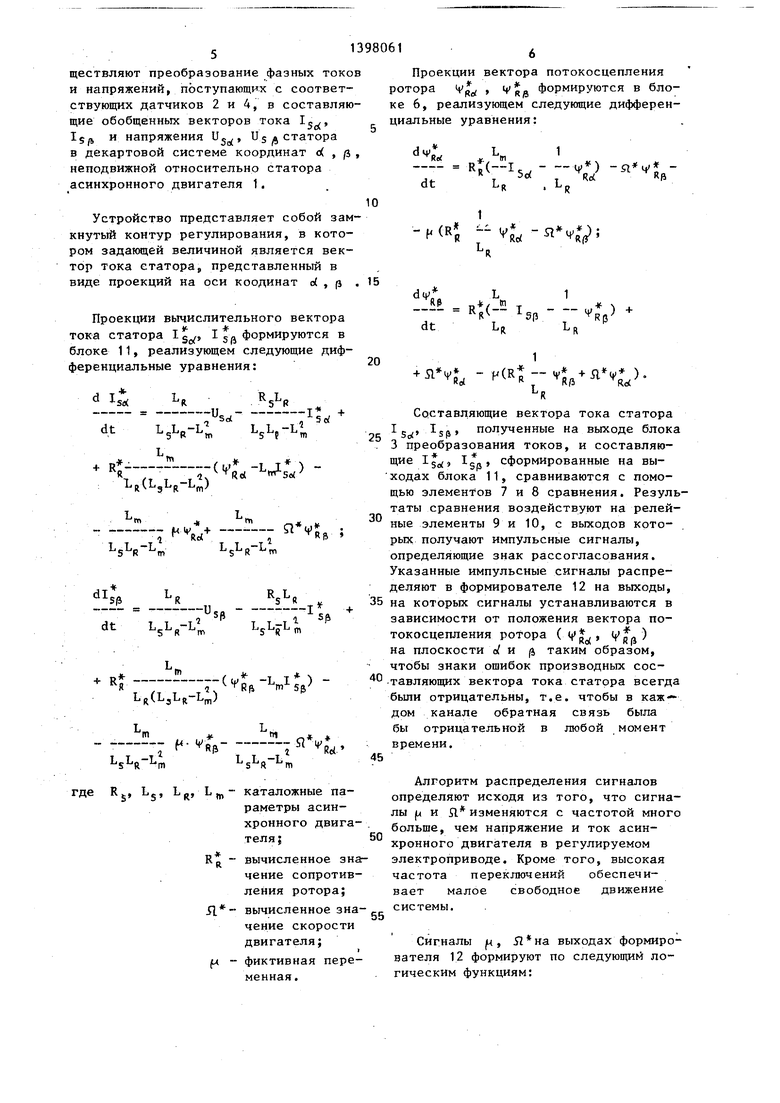
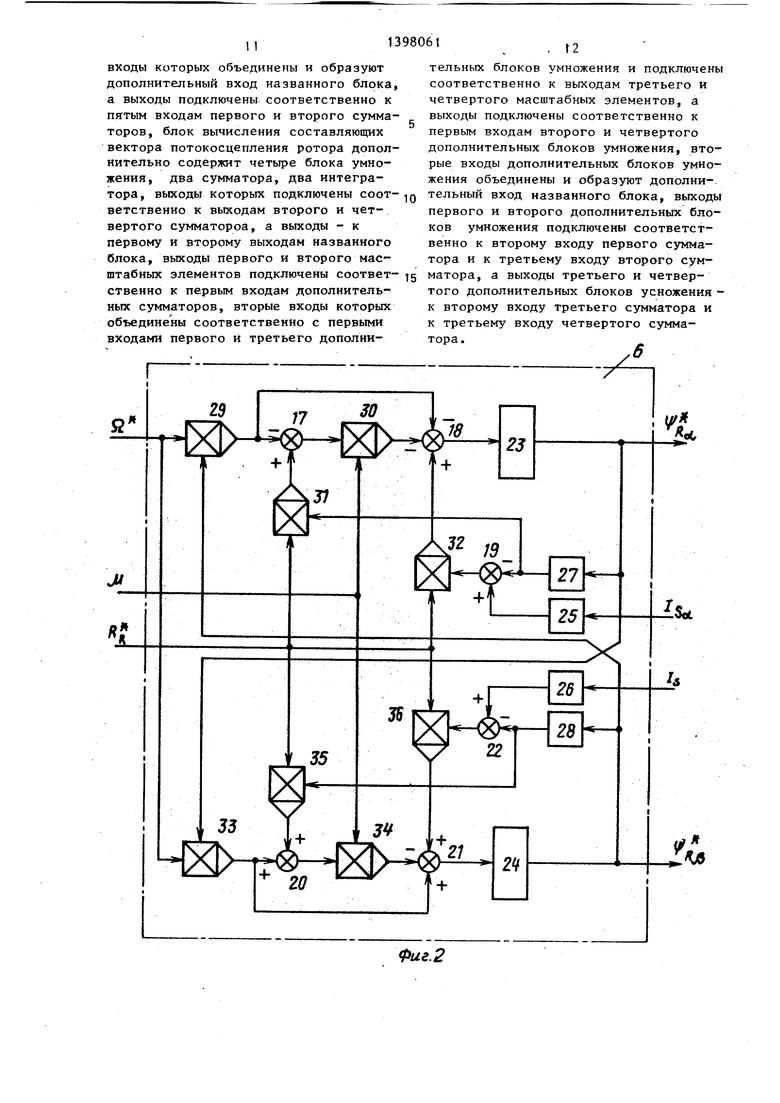
ния объединены и образуют дополнительный вход блока 6 вычисления составляющих вектора потокосцепления ротора. Выходы блоков 31 и 35 умножения подключены соответственно к входам сумматоров 17 и 20, а выходы блоков 32 и 36 умножения - к третьим входам сумматоров 18 и 21.
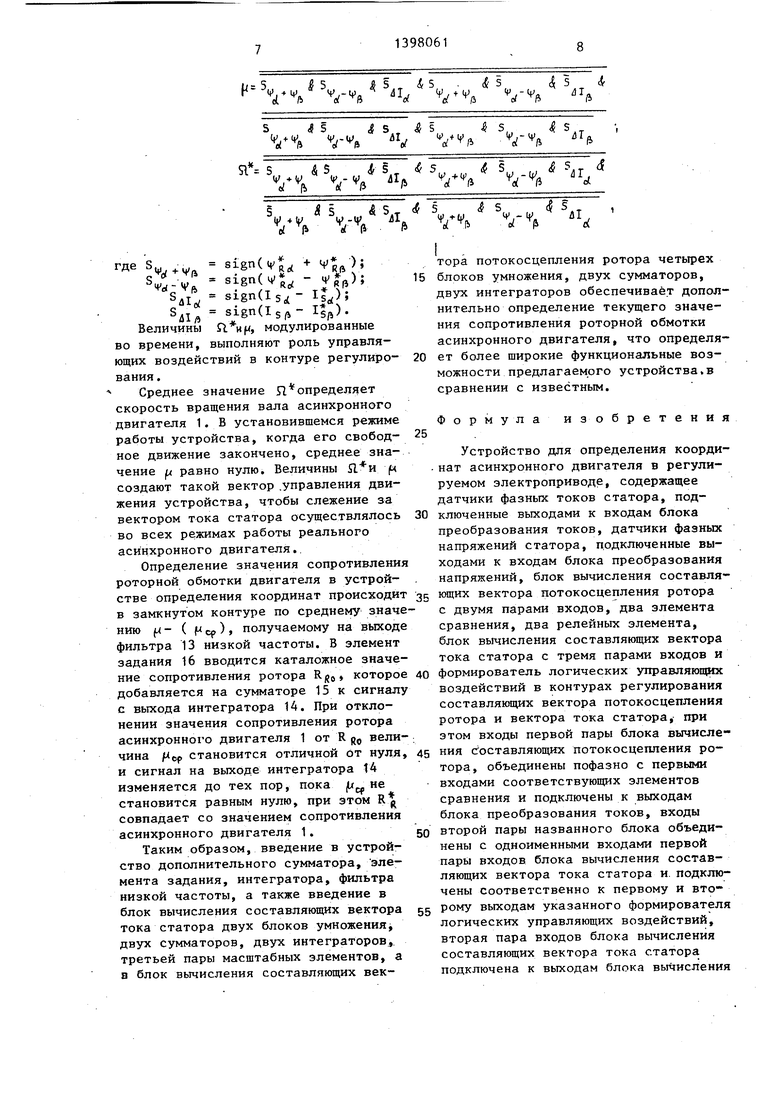
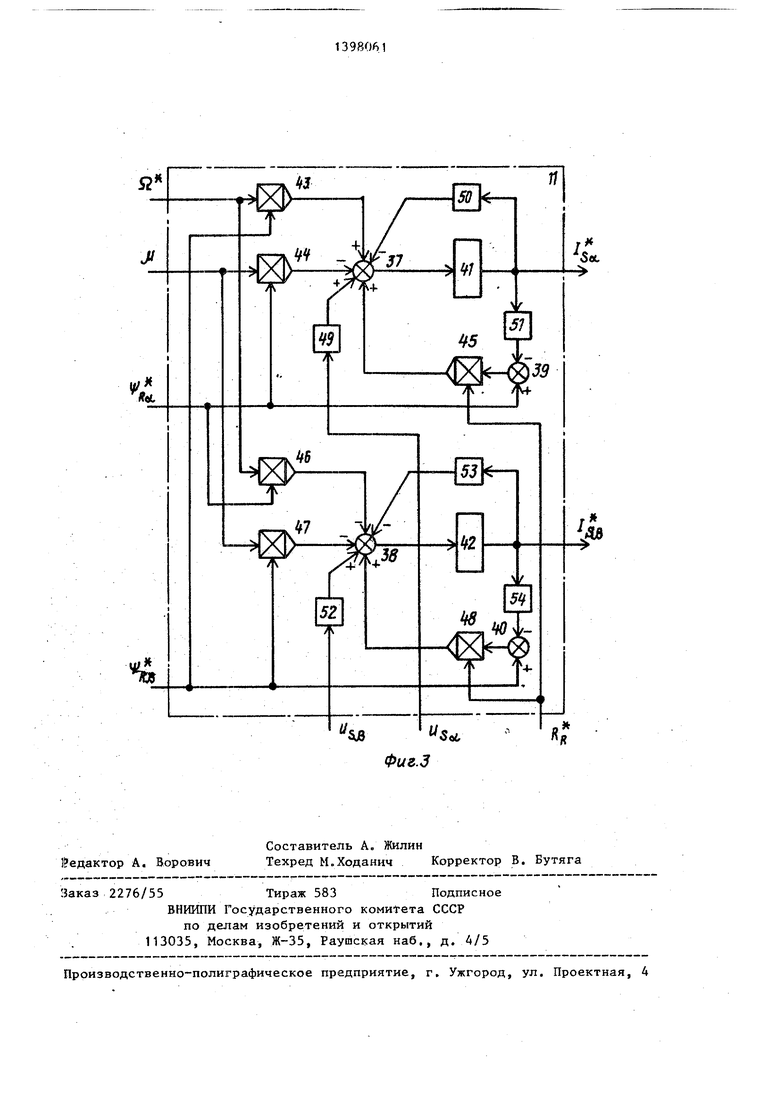
Блок 11 вычисления составляющих вектора тока статора (фиг. 3) снабжен сумматорами 37-40, интеграторами 41 и 42, блоками 43-48 умножения, масштабными элементами 49-54, причем
рых подключены к входам релейных элементов 9 и 10, выходы которых подключены к первой паре входов формирователя 12. Вторая пара входов форми- j. рователя 12 подключена к выходам блока 6 вычисления составляющих вектора потокосцепления ротора.
Дополнительные входы блоков 6 и 11 объединены и подключены к выходу сум-10 матора 15, первый вход которого подключен к выходу интегратора 14, второй вход - к выходу элемента 16 задания.
Вход, фильтра 13 низкой частоты 15 первые входы блоков 43, 46 и 44, 47 подключен к первому выходу формирова- усножения объединены попарно и обра- теля 12 логических управляющих воздействий, а выход - к входу интегратора 14,
Блок 6 вычисления составляющих 20 вектора потокосцепления ротора (фиг. 2) снабжен сумматорами 17-22, двумя интеграторами 23 и 24, масштаб-- ными элементами 25-28, блоками 29-36 умножения, причем входы масштабных элементов 25 и 26 образз ют первую пару входов блока.6. Первые входы блоков 29, 33 и 30, 34 умножения попарно объединены и образуют вторую пару входов блока 6 вычислениясо- г ставляющих вектора потокосцепления ротора. Выходы блоков 29 и 33 умножения, подключены соответственно к объединенным попарно первым входам сумматора 17, 18 и 20, 21, выходы cyteiaro- gg рому и третьему входам сумматора 38, ров 17 и 20 подключены соответственно выходы сумматоров 37 и 38 подключены к вторым входам блоков 30 и 34 умно- к входам интеграторов 41 и 42, выхо- жения, выходы которых подключены ды которых подключены к объединен- соответственно к вторым входам сум- ным попарно входам масштабных элемен- маторов 18 и 21, выходы которых под- 40 тов 50, 51 и 53, 54 и образуют выходы ключены соответственно к входам интег блока 11 вычисления составляющих век- раторов 23 и 24, выходы которых обра- тора тока статора. Выходы масштабных зуют выходы блока 6 и пoдкJпoчeны к элементов 50 и 53 подключены к чет- объединенным попарно второму входу вертым входам сумматоров 37 и 38, блока 33 умножения, входу масштабного 45 Д масштабных элементов 51 и 54, элемента 27, второму входу блока 24 подключены к вторым входам сумматоров умножения, входу масштабного элемен- . 39 и 40, выходы которых подключены та 28. Выходы масштабных элементов к первым входам блоков 45 и 48 умножения, вторые входы которьпс объедине- gQ ны и образуют дополнительный вход блока 11. Выходы блоков 45 и 48 умножения подключены к пятым входам сумматоров 37 и 38.
Устройство для определения коор- Ес динат асинхронного двигателя в регулируемом электроприводе работает сле- дукяцим образом.
Блок 3 преобразования токов и блок 5 преобразования напряжений Ь,сузуют первую пару входов блока 11, Вторые входы блоков 44, 46 и 43, 47 умножения объединены попарно и образуют первую пару входов блока 11. Вторые входы блоков 44, 46 и 43, 47 умножения объединены попарно и образуют вторую пару входов блока 11, которая подключена соответственно к
25 первым входам сумматоров 39 и 40. Третья пара входов блока 11 подключена к входам масштабных элементов 49 и 52, вьгеоды которых подключены соответственно к первым входам сумма30 торов 37 и 38, Выходы блоков 43 и 44 умножения подключены соответственно к второму .и третьему входам сумматора 37, выходы блоков 46 и 47 умножения подключены соответственно к вто25 и 26 подключены соответственно к первым входам сумматоров 19 и 22, вторые входы которых объединены соответственно с первыми входами блоков 31 и 35 умножения и подключены соответственно к выходам масштабных элементов 27 и 28,
Выходы сумматоров 19 и 22 подключены соответственно к первым входам блоков 32 и 36 умножения. Вторые входы блоков 31, 32, 35 и 36 умножения объединены и образуют дополнительный вход блока 6 вычисления составляющих вектора потокосцепления ротора. Выходы блоков 31 и 35 умножения подключены соответственно к входам сумматоров 17 и 20, а выходы блоков 32 и 36 умножения - к третьим входам сумматоров 18 и 21.
Блок 11 вычисления составляющих вектора тока статора (фиг. 3) снабжен сумматорами 37-40, интеграторами 41 и 42, блоками 43-48 умножения, масштабными элементами 49-54, причем
15 первые входы блоков 43, 46 и 44, 47 усножения объединены попарно и обра-
0 gg рому и третьему входам сумматора 38, выходы сумматоров 37 и 38 подключены к входам интеграторов 41 и 42, выхо- ды которых подключены к объединен- ным попарно входам масштабных элемен- 40 тов 50, 51 и 53, 54 и образуют выходы блока 11 вычисления составляющих век- тора тока статора. Выходы масштабных элементов 50 и 53 подключены к чет- вертым входам сумматоров 37 и 38, 45 Д масштабных элементов 51 и 54, подключены к вторым входам сумматоров . 39 и 40, выходы которых подключены к первым входам блоков 45 и 48 умножения, вторые входы которьпс объедине- gQ ны и образуют дополнительный вход блока 11. Выходы блоков 45 и 48 умножения подключены к пятым входам сумматоров 37 и 38.
зуют первую пару входов блока 11, Вторые входы блоков 44, 46 и 43, 47 умножения объединены попарно и образуют первую пару входов блока 11. Вторые входы блоков 44, 46 и 43, 47 умножения объединены попарно и образуют вторую пару входов блока 11, которая подключена соответственно к
25 первым входам сумматоров 39 и 40. Третья пара входов блока 11 подключена к входам масштабных элементов 49 и 52, вьгеоды которых подключены соответственно к первым входам сумма30 торов 37 и 38, Выходы блоков 43 и 44 умножения подключены соответственно к второму .и третьему входам сумматора 37, выходы блоков 46 и 47 умножения подключены соответственно к вто
ществляют преобразование фазных токов и напряжений, поступающих с соответствующих датчиков 2 и 4, в составляющие обобщенных векторов тока ГзсС Igp и напряжения V, Us статора в декартовой системе координат о( , (З , неподвижной относительно статора асинхронного двигателя 1.
Устройство представляет собой замкнутый контур регулирования, в котором задающей величиной является вектор тока статора, представленный в виде проекций на оси коодинат о( , р .
Проекции вычислительного вектора тока статора I g ,, I 5А формируются в блоке 11, реализующем следующие дифференциальные уравнения:
SP
.. л
я ,,
m
де
S
R
Lm
Л
..
каталожные параметры асинхронного двигателя ;
вычисленное значение сопротивления ротора;
вычисленное значение скорости
двигателя;
I
фиктивная переменная.
Проекции вектора потокосцепления ротора Vov
Vov « формируются в блоKtf р
ке 6, реализующем следующие дифференциальные уравнения:
0
Составляющие вектора тока статора Ij , Ij., полученные на выходе блока . 3 преобразования токов, и составляющие (9 IS Q сформированные на выходах блока 11, сравниваются с помощью элементов 7 и 8 сравнения. Результаты сравнения воздействуют на релейные элементы 9 и 10, с выходов которых получают импульсные сигналы, определяющие знак рассогласования. Указанные импульсные сигналы распределяют в формирователе 12 на выходы, 5 на которых сигналы устанавливаются в зависимости от положения вектора потокосцепления ротора ( VRJ ) на плоскости о/ и таким образом, чтобы знаки ошибок производных составляющих вектора тока статора всегда были отрицательны, т.е. чтобы в каждом канале обратная связь была бы отрицательной в любой момент времени.
0
50
55
Алгоритм распределения сигналов определяют исходя из того, что сигналы |u и Л изменяются с частотой много больще, чем напряжение и ток асинхронного двигателя в регулируемом электроприводе. Кроме того, высокая частота переключений обеспечивает малое свободное движение системы.
Сигналы f4 , выходах формирователя 12 формируют по следующий логическим функциям:
Ч-/Ч-,Ч Ч-/Ч-/Ч
s is s s4s4s,
V f
Чл Ч- / /У V/ 4 v/v/4 V /Vv 4
где S, sign(( + 4)тора потокосцепления ротора четьфех
( Kft блоков умножения, двух сумматоров,
S.T signdsv Isflf двух интеграторов обеспечивает дополS. sign(IsA 1|га нительно определение текущего значеВеличины , модулированныения сопротивления роторной обмотки во времени, выполняют роль управля-асинхронного двигателя, что определяющих воздействий в контуре регулиро- 20ет более широкие функциональные воз- вания.можности предлагаемого устройства,в
Среднее значение Л определяетсравнении с известным, скорость вращения вала асинхронного
двигателя 1. В установившемся режимеФормула изобретения работы устройства, когда его свобод- 25
ное движение закончено, среднее зна- Устройство для определения коорди- чение fx равно нулю. Величины |Ц - нат асинхронного двигателя в регули- создают такой вектор .управления дни-руемом электроприводе, содержащее жения устройства, чтобы слежение задатчики фазных токов статора, под- вектором тока статора осуществлялось 30ключенные выходами к входам блока во всех режимах работы реальногопреобразования токов, датчики фазных асинхронного двигателя.,напряжений статора, подключенные выОпределение значения сопротивленияходами к входам блока преобразования
роторной обмотки двигателя в устрой- .напряжений, блок вычисления составля-
стве определения координат происходит вектора потокосцепления ротора
в замкнутом контуре по среднему значе-с двумя парами входов, два элемента
нию (Х- ( Hcp)j получаемому на выходесравнения, два релейных элемента,
фильтра 13 низкой частоты. В элементблок вычисления составляющих вектора
задания 16 вводится каталожное значе-тока статора с тремя парами входов и
ние сопротивления ротора Rjjo которое 40формирователь логических управляюпрос
добавляется на сумматоре 15 к сигналувоздействий в контурах регулирования
с выхода интегратора 1А. При откло-составляющих вектора потокосцепления
нении значения сопротивления ротораротора и вектора тока статора, при
асинхронного двигателя 1 от R g, вели-этом входы первой пары блока вычислечина становится отличной от нуля, доставляющих потокосцепления рои сигнал на выходе интегратора tAтора, объединены пофазно с первыми
изменяется до тех пор, пока |и„ невходами соответствующих элементов
становится равным нулю, при этом R сравнения и подключены к выходам
совпадает со значением сопротивленияблока преобразования токов, входы
асинхронного двигателя 1.50второй пары названного блока обьедиТаким образом, введение в устрой-нены с одноименными входами первой ство дополнительного сумматора, эле-пары входов блока вычисления состав- мента задания, интегратора, фильтраляющих вектора тока статора и. подклю- низкой частоты, а также введение вчены соответственно к первому и вто- блок вычисления составляющих вектора 55РО У выходам указанного формирователя тока статора двух блоков умноженияjлогических управляющих воздействий, двух сумматоров, двух интеграторов,.вторая пара входов блока вычисления третьей пары масштабных элементов, асоставляющих вектора тока статора в блок вычисления составляющих век-подключена к выходам блока вычисления
составляющих вектора потокосцепления ротора, третья пара блока вычисления составляющих вектора тока статора входов подключена к выходам блока преобразования напряжений, а выходы упомянутого блока вычисления подключены к вторым входам соответствующих элементов сравнения, соединенных ,вы- х|одами с входами соответствующих ре- л|ейных элементов, выходы которых п|эдключены к первой паре входов ука- з нного формирователя логических управляющих воздействий, вторая пара вводов которого подключена к выходам вычисления составляющих вектор пЬтокосцепления ротора, вьтолнелного С: четырьмя блоками умножения, че- Т1|)фьмя сумматорами и четырьмя мас- ш габными элементами, входы первого И;второго масштабных элементов обра- ainoT первую пару входов блока вычис- составляющих вектора потоко- - с епления ротора, первый вход второй входов этого блока подключен к объединенным первым входам первого и;второго блоков умножения, второй вЗсод этого блока вычисления - к объединенным первым входам третьего и четвертого блоков умножения, выход пфрвого блока умножения подключен кiобъединенным первым входам первого и:второго сумматора, выход второго 6jkoKa умножения подключен к объедик$нным первым входам третьего и чет- „ воздействий, а выход - к входу интег- вфртого сумматоров, выходы первого и TiieTbero сумматороа подключены соот- в тственно к вторым входам третьего . и;четвертого блоков умножения, выхоратора, подключенного выходом к первому входу сумматора, второй вход которого соединен с выходом элемента задания, причем блок вычисления составды которых подключены соответственно к вторым входам второго и четвертого сумматоров, первый выход блока вычис- ления составляющих вектора потоко сцепления ротора подключен к объединенным между собой входу третьего масштабного элемента и второму входу второго блока умножения, а второй выход названного блока подключен к о(5ъединенным между собой входу четвертого масштабного элемента и второму входу первого блока умножения, блок вычисления составляющих вектора тока статора вьтолнан с четырьмя блоками умножения, двумя сумматорами
четырьмя масштабными элементами, при- но к первому и второму входам второй чем первый вход первой пары входов пары названного блока, выходы допол- Нйзванного блока подключен к объединенным первым входом первого и второнительных сумматоров подключены соответственно к первым входам дополнительных блоков умножения, вторые
го блока умножения, а второй вход - к
объединенным первым входам третьего и четвертого блока умножения, первый вход второй пары входов подключен к объединенным вторым входам второго и . третьего блоков умножения, а второй вход - к объединенным вторым входам первого и четвертого блоков умножения, выходы первого и второго блоков умножения подключены соответственно к
первым входам первого и второго сумматоров, а выходы третьего и четвертого блоков умножения - к вторым входам первого и второго сумматоров, третьи
и четвертые входы которых подключены соответственно к выходам первой и второй пары масштабных элементов, причем входы первой пары масштабных элементов образуют третью пару входов
названного блока, отличающееся тем, что, с целью расширения функциональных возможностей путем получения дополнительной информации о значении сопротивления роторной
обмотки асинхронного двигателя, введены сумматор, элемент задания, интегратор и фильтр низкой частоты, а блоки вычисления составляющих вектора тока статора и потокосцепления ротора,
снабжены по одному дополнительному входу, подключенному к выходу сумматора, при этом вход фильтра низкой частоты подключен к первому выходу формирователя логических управляющих
воздействий, а выход - к входу интег-
ратора, подключенного выходом к первому входу сумматора, второй вход которого соединен с выходом элемента задания, причем блок вычисления составляющих вектора тока статора дополнительно снабжен двумя блоками умножения, двумя сумматорами, третьей парой масштабных элементов, двумя интеграторами, входы которых подключены соответственно к выходам первого и второго сумматоров, а выходы образуют выходы названного блока и подключены соответственно к объединенным входам первых и вторых масштабных элементов и третьей пар, выходы третьей пары масштабных элементов под-: ключены соответственно к первым входам дополнительных сумматоров, вторые входы которых подключены соответствен
но к первому и второму входам второй пары названного блока, выходы допол-
нительных сумматоров подключены соответственно к первым входам дополнительных блоков умножения, вторые
входы которьгх объединены и образуют дополнительный вход названного блока, а выходы подключены соответственно к пятым входам первого и второго сумма-
торов, блок вычисления составляющих вектора потокосцепления ротора дополнительно содержит четыре блока умножения, два сумматора, два интегратора, выходы которых подключены соответственно к выходам второго и четвертого сумматороа, а выходы - к первому и второму выходам названного блока, выходы первого и второго масштабных элементов подключены соответ- ственно к первым входам дополнительных сумматоров, вторые входы которых объединены соответственно с первыми входами первого и третьего дополниQ
тельных блоков умножения и подключены соответственно к выходам третьего и четвертого масштабных элементов, а выходы подключены соответственно к первым входам второго и четвертого дополнительных блоков умножения, вторые входы дополнительных блоков умножения объединены и образуют дополни-- тельный вход названного блока, выходы первого и второго дополнительных блоков умножения подключены соответственно к второму входу первого сумматора и к третьему входу второго сумматора, а выходы третьего и четвертого дополнительных блоков усножения - к второму входу третьего сумматора и к третьему входу четвертого сумматора.
Фиг.2
52
Фиг.З
| Патент ФРГ №-3034252, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
