114
Изобретение относится к области обработки металлов давлением и может быть использонано в приводах исполнительных механизмов штамповочных автоматов с выстоями в крайних положениях.
Цель изобретения - расширение технологических возможностей автомата за счет увеличения продолжительности выстоя исполнительного звена в крайних положениях.
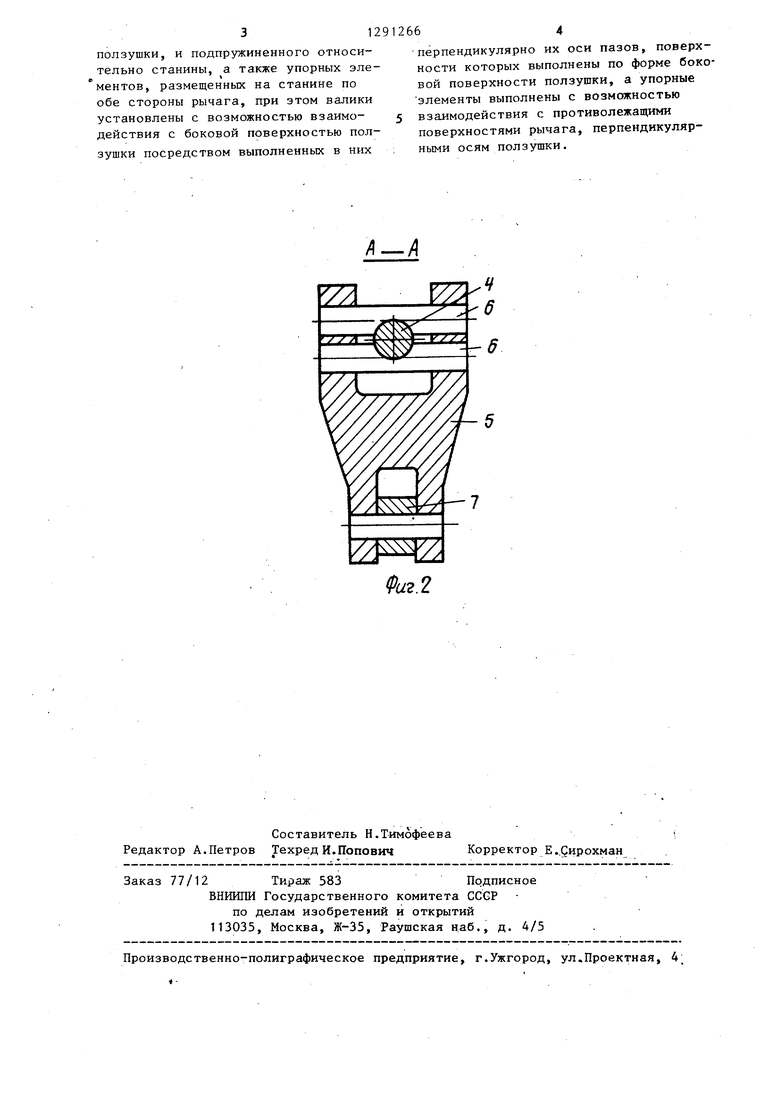
На фиг. 1 приведена схема привода исполнительного механизма; на,фиг.2 разрез А-А на фиг. 1.
Пр ивод исполнительных механизмов штамповочного автомата содержит смонтированные на станине 1 ведущий кривошип 2, связанньш шатуном 3 с узлом перемещения и выстоя исполнительного звена, размещенным в станине 1. Узел перемещения и выстоя выполнен в виде ползушки 4. установленной в н аправляющих станины и связанной с ней рычагом 5, размещенмык с возможностью возвратно-поступательного перемещения, посредством двух равноудаленных от оси ползушки валиков 6, закрепленных в рычаге перпендикулярно оси ползушки с смещением один относительно другого на расстояние а. Валики 6 взаимодействуют с боковой поверхностью ползшки 4 посредством выполненных в них перпедникулярно их оси пазов, поверхности которых выполнены по форме боковой поверхности ползушки. Рычаг 5 на расстоянии b от ползушки 4 кинематически связан с исполнительным звеном 7 и с станиной 1 посредством пружины 8 сжатия. Для обеспечения работоспособности привода исполнительных механизмов и конструктивных габаритов параметры а и b должны соотноситься друг с другом условием
b/a5l/2f,(1)
где f - коэффициент трения между пол зушкой 4 и пазами валиков 6.
На станине 1 соосно ползушке 4 установлены передний 9 и задний 10 упоры, взаимодействующие с рычагом 5
Привод исполнительных механизмов штамповочного автомата работает следующим образом.
При вращении кривошипа 2 ползуш- ка 4 узла перемещения и выстоя исполнительного звена совершает возвратно-поступательные движения. Пружина 8 сжатия через рычаг 5 постоян
62
но обеспечивает контакт между валиками 6 и ползуткой 4, прижимая их пазами с некоторой силой нормального давления к боковой поверхности ползушки, создавая при выполнении условия (1) силы трения, которые удерживают рычаг 5 неподвижно на ползушке 4 .
При ходе вперед на исполнительное звено 7 воздействует рабочая сила, по направлению совпадающая с силой от пружины 8, которая, по условию (1) не вызывает проскальзывания рычага .5 на ползушке 4. Таким образом, при ходе вперед, когда на ры- чаг 5 действуют рабочая сила и сила от пружины 8, и при ходе назад, когда на рычаг 5 действует сила от пружины 8, рычаг 5 и ползушка 4 работают как одно жесткое тело.
При взаимодействии рычага 5 с упорами 9 и 10 между валиками 6 и пол- зушкой 4 будет проскальзывание до
того момента, пока перемещающаяся ползушка 4 не изме)ит направления движения на противоположное. Исполнительное звено 7 в этот момент отрабатывает участки выстоя цикловой диаграммы автомата. Продолжительность этих выстоев определяется расстоянием регулируемыми упорами и может доходить до значений, близких к 180°.
Применение предлагаемого привода
исполнительных механизмов обеспечивает расширение технологических возможностей автомата.
Формула изобретения Привод исполнительных механизмов
штамповочных автоматов, содержащий смонтированные на станине кривошип, шатун, соединенный с исполнительным звеном посредством узла перемещения, и выстоя последнего, о т л и ч а ю- щ и и с я TeMj что, с целью расширения технологических возможностей автомата за счет увеличения продолжительности выстоя, узел перемещения
и выстоя выполнен в виде ползушки, установленной в направляющих станины, рычага, установленного на.ползушке с возможностью возвратно-поступательного относительно нее перемещения посредством пары равноудаленных от оси ползушки валиков, оси которых расположены перпендикулярно оси ползушки, параллельно одна относительно ДРУ гой и со смещением в направлении оси
ползушки, и подпружиненного относительно станины, а также упорных эле- ментов, размещенньк на станине по обе стороны рычага, при этом валики установлены с возможностью взаимодействия с боковой поверхностью ползушки посредством выполненных в них
12664
перпендикулярно их оси пазов, поверхности которых выполнены по форме боковой поверхности ползушки, а упорные элементы выполнены с возможностью взаимодействия с противолежащими поверхностями рычага, перпендикулярными осям ползушки.
/1-/I
И
Фиг 2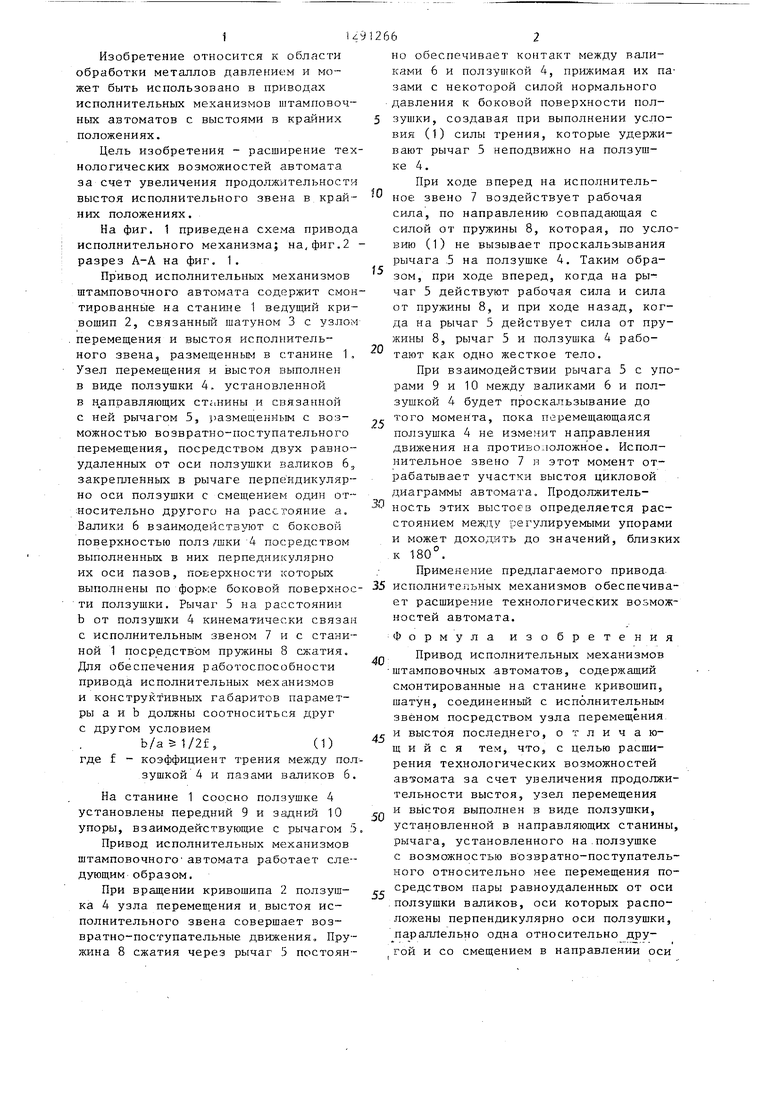
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод В.С.Борисова исполнительных механизмов штамповочных автоматов | 1986 |
|
SU1433614A2 |
| Привод исполнительных механизмов штамповочных автоматов | 1986 |
|
SU1398964A1 |
| Механизм переноса заготовок | 1987 |
|
SU1547931A1 |
| Штамп для штамповки деталей типа топора | 1986 |
|
SU1373463A1 |
| Устройство переноса заготовок к многопозиционным штамповочным автоматам | 1988 |
|
SU1503969A1 |
| Грейферное подающее устройство | 1987 |
|
SU1417976A1 |
| Узел крепления штамповочного инструмента | 1990 |
|
SU1803338A1 |
| Вышивальная машина | 1980 |
|
SU1044696A1 |
| Устройство а.ф.слюсаренко для транспортировки заготовок | 1977 |
|
SU867485A1 |
| Штамповочный комплекс | 1988 |
|
SU1609537A1 |
Изобретение относится к области обработки металлов давлением и может быть использовано в приводах исполнительных механизмов штамповочных автоматов. Цель изобретения - расширение технологических возможностей J автомата за счет обеспечения продол- . жительности выстоя исполнительного. звена в крайних положениях. Узел перемещения и выстоя исполнительного звена содержит ползушку (П) 4, уста- новленную в направляющих станины и связанную с рычагом .(Р) 5 посредством двух равноудаленных от оси П валиков 6, закрепленных на Р. Валики 6 взаимодействуют с боковой повер х- ностью Р посредством выполненных в них пазов по форме поверхности П. На станине 1 закреплены два упора 9 и 10 по обе стороны Р. Пружина 8 сжатия постоянно обеспечивает контакт между валиками и П, создавая трения, которые удерживают Р неподвижно на П при его перемещении. При. взаимодействии Р с упорами 9 и 10 происходит проскальзывание П относительно рычага, и исполнительное звено 7 отрабатывает необходимые участки выстоя цикловой диаграммы автома- та. 2 ил. с б (Л 2fni-2-/-/ P И P-Bia Фиг} 2-J-P-e/a Р S/Q /if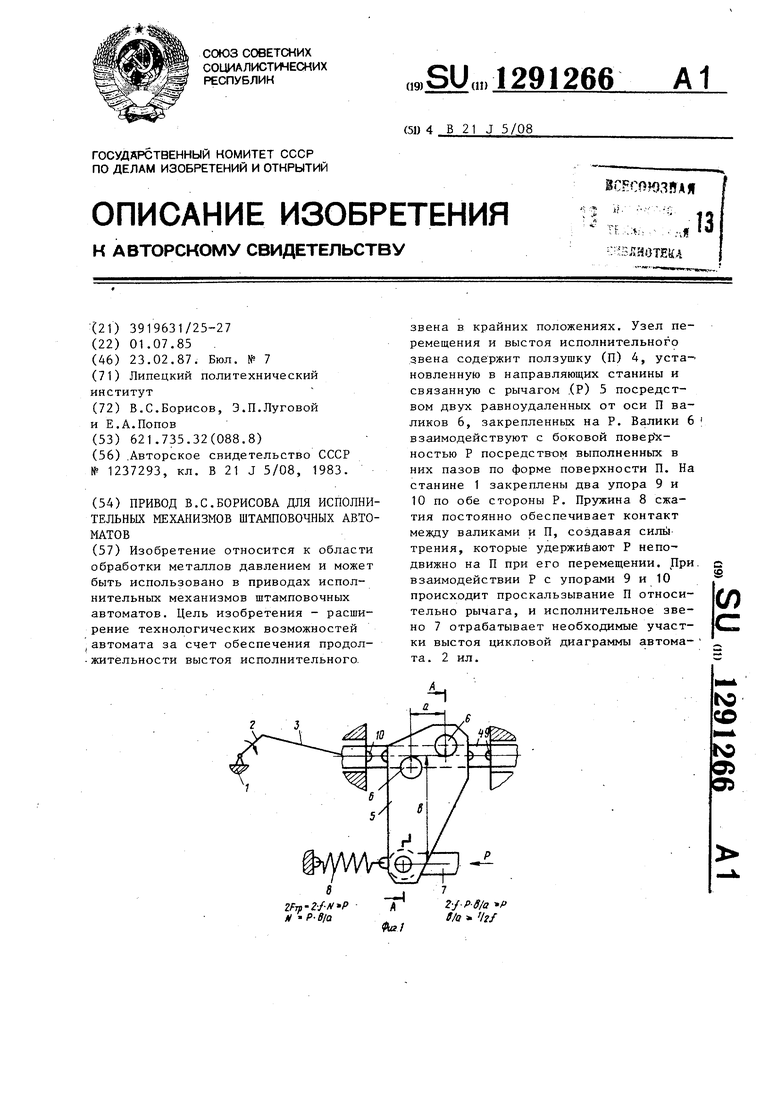
| Механизм переноса для многопозиционных штамповочных автоматов | 1983 |
|
SU1237293A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
