со
00
о: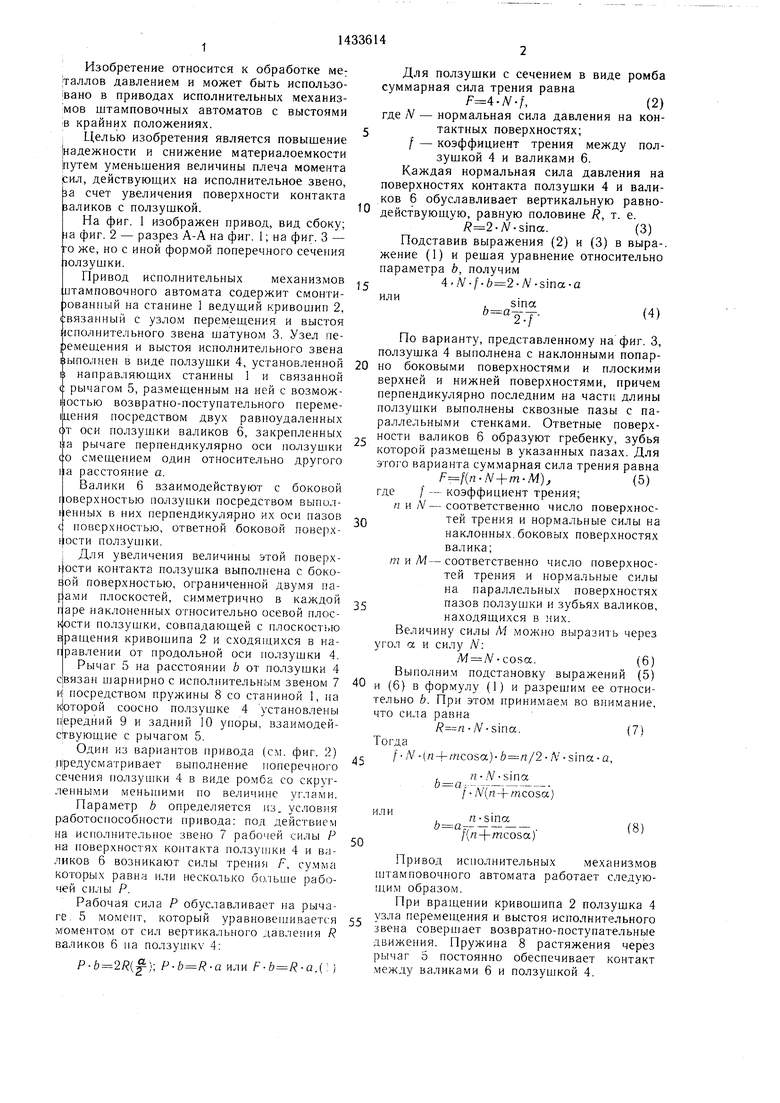
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод исполнительных механизмов штамповочных автоматов | 1986 |
|
SU1398964A1 |
| Привод В.С.Борисова для исполнительных механизмов штамповочных автоматов | 1985 |
|
SU1291266A1 |
| Привод подающего органа устройства для подачи материала | 1985 |
|
SU1297973A1 |
| Устройство для загрузки заготовок в зону деформации | 1987 |
|
SU1524956A1 |
| Способ обработки фасок на седлах клапанов и устройство для его реализации | 1985 |
|
SU1282972A1 |
| Вышивальная машина | 1980 |
|
SU1044696A1 |
| Устройство для пробивки отверстий в стенках полых изделий типа обода колеса | 1986 |
|
SU1388150A2 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2000 |
|
RU2184057C2 |
| Загрузочное устройство | 1985 |
|
SU1301630A1 |
| Механический штамповочный пресс | 1975 |
|
SU558799A1 |

Изобретение относится к обработке металлов давлением и может быть использовано в приводах исполнительных механизмов штамповочных автоматов с выстоями в крайних положениях. Цель - повышение надежности и снижение материалоемкости путем уменьшения величины плеча момента сил, действуюш,их на исполнительное звено, за счет увеличения поверхности контакта валиков с ползушкой. Эта поверхность контакта увеличена за счет выполнения ползуш- ки с наклонными попарно гранями на боковой ее поверхности. При этом сечение пол- зушки может быть выполнено в виде ромба. Сечение ползушки может иметь и более сложную форму, например в виде двух совмещенных большими основаниями равнобедренных трапеций. Их меньшие основания обрашены в разные стороны, а перпендикулярно им выполнены сквозные пазы с параллельными стенками, закрытые в направлении оси ползушки. Таким образом получаются pa3BHtbie по плош,ади поверхности контакта ползушки и валиков, что уменьшает габаритные размеры привода и повышает его нагрузочную способность. 2 3. п. ф-лы, 1 ил. i (Л
rNs
Изобретение относится к обработке ме; :таллов давлением и может быть использо- |вано в приводах исполнительных механизмов штамповочных автоматов с выстоями в крайних положениях.
: Целью изобретения является повышение надежности и снижение материалоемкости Ьутем уменьшения величины плеча момента сил, действуюш,их на исполнительное звено, за счет увеличения поверхности контакта валиков с ползушкой.
На фиг. 1 изображен привод, вид сбоку; -la фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - то же, но с иной формой поперечного сечения юлзушки.
Привод исполнительных механизмов лтамповочного автомата содержит смонти- )ованный на станине 1 ведуший кривошип 2, связанный с узлом перемешения и выстоя исполнительного звена шатуном 3. Узел пе- ремепдения и выстоя исполнительного звена выполнен в виде ползушки 4, установленной I направляюш,их станины и связанной с рычагом 5, размеш,енным на ней с возможностью возвратно-поступательного перемешения посредством двух равноудаленных (т оси ползушки валиков 6, закрепленных на рычаге перпендикулярно оси ползушки со смещением один относительно другого па расстояние а.
Валики 6 взаимодействуют с боковой поверхностью ползушки посредством выпол- пенных в них перпендикулярно их оси пазов с поверхностью, ответной боковой поверх- fiocTH ползуп1ки.
i Для увеличения величины этой поверх- ь|ости контакта ползушка выполнена с боковой поверхностью, ограниченной двумя па- fja.viH плоскостей, симметрично в каждой liape наклоненных относительно осевой плос- иости ползушки, совпадаюш,ей с плоскостью вращения кривошипа 2 и сходящихся в на- гтравлении от продольной оси ползушки 4. I Рычаг 5 на расстоянии b от ползушки 4 С|вязан шарнирно с исполнительным звеном 7 и посредством пружины 8 со станиной 1, на кЬторой соосно ползушке 4 установлены передний 9 и задний 10 упоры, взаимодействующие с рычагом 5.
Один из вариантов привода (см. фиг. 2) п1редусматривает выполнение поперечного сечения ползушки 4 в виде ромба со скруг- меньшими по величине углами.
Параметр b определяется из. условия работоспособности привода: под действием на исполнительное звено 7 рабочей силы Р на поверхностях контакта ползушки 4 и валиков 6 возникают силы трения F, сумма которых равна или несколько больше рабочей силы Р.
Рабочая сила Р обуславливает на рычаге. 5 момент, который ypaBHOBenjHBacTCH м оментом от сил вертикального давления R валиков 6 на ползуи1к - 4:
( p.b R-a или .( :}
Для ползушки с сечением в виде ромба суммарная сила трения равна
F 4-N-f,(2)
где /V - нормальная сила давления на кон- тактных поверхностях;
/ - коэффициент трения между ползушкой 4 и валиками 6. Каждая нормальная сила давления на поверхностях контакта ползушки 4 и валиков 6 обуславливает вертикальную равно- действующую, равную половине R, т. е.
2-A -sina.(3)
Подставив выражения (2) и (3) в выра-. жение (1) и решая уравнение относительно параметра Ь, получим 5 4-N-f-b 2-N-sma-a
А sin«
2 -7
По варианту, представленному на фиг. 3, ползушка 4 выполнена с наклонными попар- 0 но боковыми поверхностями и плоскими верхней и нижней поверхностями, причем перпендикулярно последним на части длины ползушки выполнены сквозные пазы с параллельными стенками. Ответные поверх- ;- ности валиков 6 образуют гребенку, зубья которой размещены в указанных пазах. Для этого варианта суммарная сила трения равна
(n-N+m-M),(5)
где / - коэффициент трения;
п и/V-соответственно число поверхнос- Qтей трения и нормальные силы на
наклонных, боковых поверхностях валика;
т и /М- соответственно число поверхностей трения и нормальные силы на параллельных поверхностях 5пазов ползушки и зубьях валиков,
находящихся в них.
Величину силы М можно выразить через угол а и силу N:
M N-cosoi.(6)
Выполним подстановку выражений (5) 0 и (6) в формулу (1) и разрешим ее относительно Ь. При этом прини.маем во внимание, что сила равна
R n-N-sma.(7}
Тогда г f N (n-4-fncosa) /V-sin а-а,
n-.iV-sina
.--.-.-7-.
/ /Vi n-bmcosa)
или
n-sincc
h - /2
f(n- -mcosa)
(8)
Привод исполнительных механиз.мов и тамповочного автомата работает следующим образом.
При вращении кривошипа 2 ползушка 4 узла перемещения и выстоя исполнительного звена coBepujaeT возвратно-поступательные движения. Пружина 8 растяжения через рычаг о постоянно обеспечивает контакт между валиками 6 и ползущкой 4.
При ходе вперед на исполнительное звено 7 воздействует рабочая сила, по направлению совпадающая с силой от пружины 8, которая при выполнении условия (1) создает силы трения между валиками б и ползуш- кой 4, неподвижно удерживающие рычаг 5 на ползущке 4, рычаг 5 и ползушка 4 работают за одно целое.
При взаимодействии рычага 5 с упорами 9 и 10 между валиками и ползушкой 4 будет проскальзывание до того момента, пока перемещающаяся ползушка 4 не изменит направление движения на противоположное. Исполнительное звено 7 в этот момент выстаивает согласно цикловой диаграмме автомата.
При выполнении привода по варианту, показанному на фиг. 2, вертикальные силы давления валиков 6 на ползущку 4 на наклоненных под углом развитых по площади поверхностях контакта обуславливают при одной и той же величине сил нормального давления и трения уменьшение размера b и габаритов всего привода, а также увеличивают его нагрузочную способность.
При выполнении привода по варианту, показанному на фиг. 3, вертикальные силь давления валиков 6 на ползушку 4 обуславливают силы нормального давления не только на наклоненных под углом а боковых поверхностях контакта ползушки и валиков 6, но также за счет податливости элементов сечения и на вертикальных поверхностях пазов и зубьев. При этом возрастает число поверхностей трения и еще в большей степени уменьшает габариты привода и увеличивает его нагрузочную способность.
Формула изобретения
плеча момента сил, действующих на исполнительное звено, за счет увеличения поверхности контакта валиков с ползушкой, последняя выполнена с боковой поверхностью в виде четырех плоскостей, попарно симметрично
наклонен ных относительно осевой плоскости ползушки, совпадающей с плоскостью вращения кривошипа, и сходящихся в направлении от продольной оси ползущки.
5
Фиг. 1
Фиг. 2
fl-A
Фиг.З
| Привод В.С.Борисова для исполнительных механизмов штамповочных автоматов | 1985 |
|
SU1291266A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
