СП
00
Г СХ5
Ц1иг.1
Изобретение относится к электротехнике, а HMeiiHO к устройствам определения координат асинхронного двигателя, и может быть использовано в регулируемом асинхронном электроприводе общепромышленного назначения.
Цель изобретения - расширение функциональных возможностей путем определения модуля вектора потокосцеп- ления ротора и составляющих единичного вектора пбтокосцепления ротора Б декартовой системе координат о1 ,А, неподвижной относительно статора.
На фиг. 1 представлена функциональная схема устройства для определения координат асинхронного двигателя в регулируемом электроприводе; на фиг, 2 функциональная схема форУстройство содержит, кроме того, фильтры 16-21 низкой частоты, сумматоры 22 и 23, элементы 24 и 25 сравнения, релейные элементы 26 и 27, второй формирователь 28 логических сигналов обратных связей в контурах регулирования координат асинхронного двигателя, блоки 29-32 умножения.
Первые входы пятого 29 и седьмого 31, шестого 30 и восьмого 32 блоков умножения попарно объединены и подключены к первому и второму выходам второго формирователя 28. Первый и
второй выходы первого формирователя М подключены к входам третьего 16 и четвертого 17 ({мльтров низкой частоты, выходы которых подключены к объединенным попарно вторым входам
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1241399A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1988 |
|
SU1575285A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
Изобретение относится к электротехнике. Целью изобретения является расширение функциональных возможностей путем определения модуля вектора потокосцегшения ротора и составляющих единичного вектора потокосцрп.пе- ния ротора в декартовой системе координате - , |3, неподв1гаиой относительно статора. Указанная цель достигается тем, что в устройство для определения координат асинхронного двигателя в регулируемом электроприводе введены фильтры низкой частоты 16-21, сумматоры 22, 23, элементы сравнения 24, 25, релейные элементы 26, 27 и формирователь 28 логических а1гналов йбратньгх связей в контурах регулирования координат асинхронного двигателя 1. Устройство представляет собой динамическую систему с замкнутыми контурами регулирования, в которой координаты асинхронного двигателя представлены в виде проекций на оси неподвижной относительно статора декартовой системы коердинатс , /5. 2 ил. сл
мирователей логических сигналов обрат-20 пятого 29 и восьмого 32, шестого 30
ных связен в контурах регулирования асинхронного двигателя.
Устройство для определения координат асинхронного двигателя содержит подключенный к acHHxpoHHONty двигателю 1 (фиг, 1) датчик 2 составляшш 1х вектора потокосцепления ротора асинхронного двигателя, сумматоры 3 и 4, фильтры 5 и 6 низкой частоты, элементы 7 и 8 сравнения, релейные элементы 9 и 10, формирователь 11 логических сигналов обратных связей в контурах рег-улирования координат асинхронного двигателя, блоки 12-15 умножения. Первые входы первого 2 и третьего 14, второго 13 и четвертого 15 блоков умножения объединены попарно и подключены к первому и второму выходам первого формирователя 11 логических сигналов обратных связей в контурах регулирования координат асинхронного двигателя. Выходы первого 12 и второго 13, третьего 14 и четвертого 15 блоков умножения подключены соответственно через первый 3 и второй 4 сумматоры к входам первого 5 и второго 6 фильтров низкой частоты,,выходы которых подключены к первым входам первого 7 и второго 8 элементов срав нения, а выходы последних через первы 9 и второй 10 релейные элементы подключены к первой паре входов формирователя 11, вторая пара входов которого объединена пофазно с выходами датчика 2 составляющих вектора по- токосцеп(ения ротора и подключена к объединеин-г м попарно вторым входам первого 12 и четвертого 15, второго 13 и третьего 14 блоков умножения.
0
5
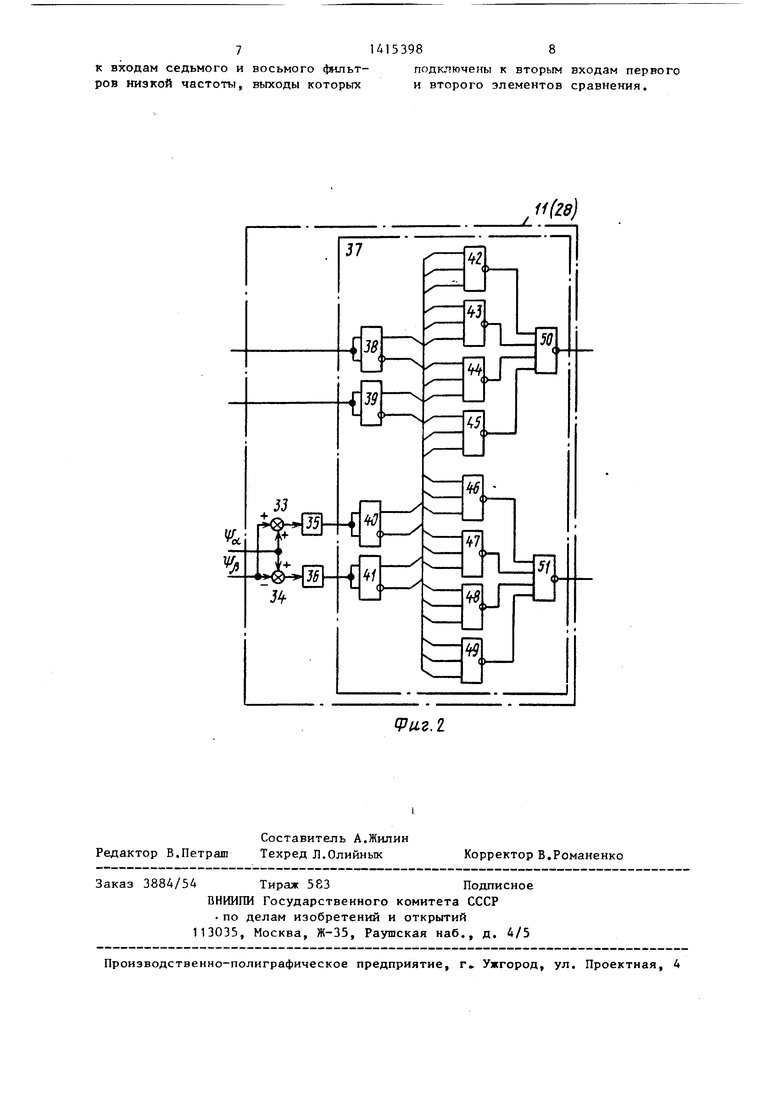
и седьмого 31 блоков умножения. Выходы пятого 29 и шестого 30, седьмого 31 и восьмого 32 блоков умножения подключены соответственно через тре5 тий 22 и четвертый 23 сумматоры к входам пятого 18 и шестого 19 фильтров низкой частоты, выходы которых подключены к первым входам третьего 24 и четвертого 25 элементов сравнения. Выходы последних через третий 26 и четвертый 27 релейные элементы подключены к первой паре входов второго формирователя 28, вторая пара входов которого объединена пофазно с выходами датчика 2 составляющих вектора потокосцепления ротора и под ключена к вторым входам третьего 24 и четвертого 25 элементов сравнения. Первый и второй выходы второго фор0 мирователя 28 подключены к входам седьмого 20 и восьмого 21 фильтров низкой частоты, выходы которых подключены к вторым входам первого 7 и второго 8 элементов сравнения. Каж- дьш из формирователей II и 28 логических сигналов обратных связей содержит сумматоры 33 и 34 (фиг. 2), релейные элементы 35 и 36, распределитель 37 импульсных сигналов, вы- полненньй на схемах И-НЕ 38-51.
Входы каждой из схем И-НЕ 38 и 39 объединены и образуют первую пару входов формирователя. Входы каждой из схем И-НЕ 40 и 4I объединены и подключены к выходам релейных элементов 35 и 36, входы которых соединены с Н1ыходами сумматоров 33 и 34. Первые и вторые входы cyм aтopoв 33 и 34 попарна объединены и образуют
5
0
5
314
вторую пару входов формирователя. Выходы схем И-НЕ 38-41 подклнг ены к соответствующим входам схем И-НЕ 42- 49, Выходы схем И-НЕ А2-А5 подключены к входам схемы И-НЕ 50, а выходы схем И-НЕ А6-49 - к входам схемы И- НЕ 51.
Выходы схем И-НЕ 50 и 51 образуют соответственно первый и второй выходы формирователя логических сигналов.
Устройство работает следующим образом.
Устройство представляет собой динамическую систему с замкнутыми контурами регулирования, в которой координаты асинхронного двигателя представлены в проекцю на оси неподвижной относительно статора декартовой системы координат Ы , 0, С помощью блоков 1 2- 5 умножения и сумматоров 3 и 4 выполняются следующие операции:
,,,
%,, Р
гдеФ,, - составляющие вектора по токосцепления ротора; а, b - имп льcныe сигналы, поступающие с выходов фор- , мирователя 1 1 ; 1Ф1 - модуля вектора потокосцепления ротора; - оценка фиктивной переменной .
С помощью блоков 29-32 умножения и сумматоров 22 и 23 выполняются следующие операции:
,р-с-Ъ,р .р
Л,
гдеЦ, Н оценки составляющих вектора потокосцепления ротора;
с, d - импульсные сигналы, поступающие с выходов формирователя 28 ;
а,, b - средние (эквивалентные) значения импульсных сигналов , поступающие с выходов фильтров 16 и 17 низкой частоты.
Проходя через фильтры 5 и 6, 18 и 19 низкой частоты сигналы lU l иб , . поступают на первые входы
Ьь Р
элементов 7 и 8, 24 и 25 сравнения, где сравниваются с сигналами Ч , и Уд (где п dcp- сигналы, поТР
15398
ступающие с выходов фильтров 20 и 21 низкой частоты. Ц , Ц1 - составляющие вектора потокосцепления ротора, поступающие с выходов датчика 2).
Сигналы ошибок на выходах элементов 7 и 8 сравнения
Л1Ч 1 Сср-1Ч 1 f d,,- гГ
сигналы ошибок на выходах элементов 24 и 25 сравнения
О.Ф
йЦ
ы Ч V-U
э
0
5
0
Сигналы ошибок и ЛЕ , илЦ д через релейные элементы 9 и 10, 26 и 27 поступают на первые пары входов формирователей 11 и 28, на попарно объединенные вторые пяры входов которых поступают сигналы V , Ц). с выходов датчика 2 составляющих вектора потокосцепления ротора.
Формирователи 1I и 28 обеспечивают отрицательные обратные связи в контурах регулирования при всех возможных состояниях вектора потокосцепления ротора. Использование в устройстве релейных элементов 9, 10, 26 и 27 позволяет рассматривать его как систему управления с переменной структурой. При этом возникают так называемые скользящие режимы, при которых величины ошибок лЩ , , лЦГ , Дфо 5 стремятся к средние (эквивалентные) значения импульсных сигналов а, Ъ, с, d определяются следующими
соотношениями;
ср
c. , Ф, 2
b S-P- i I lL si
ср
45
с 42-СГ: -%Ь
е LV,«
СР+ЬСР
ср
50
аД
В установившемся режиме работы устройства, когда его свободное движение закончено
a,p cosd, cp V sinot,
cJL
-vj
ССР 14-1 ,
514
где H iV° составляющие единичного вектора потокосцепления
ротора;
с. - угол, образуемый вектором потокосцепления ротора и осью d системы координат d ,|Й.
Частота переключений в скользящих режимах релейных элементов 9, 10, 26 и 27 составляет 50-100 кГц, благодаря чему обеппечиваготся малое свободное движение системы и формирование сигналов , ср высокой точностью.
Таким образом, введение в устройство дпя определения координат в ре- гулируеном электроприводе шести фильтров низкой частоты, третьего и четвертого сумматоров, третьего и четвертого элементов сравнения, третьего и четвертого релейных элементов, второго формирователя логических сигналов обеспечивает расширение в сравнении с известным устройством функциональных возможностей путем определения модуля вектора потокосцепления ротора и составляющих единичного вектора потокосцепления ротора.
Формула изобретения
Устройство для определения координат асинхронного двигателя в регулируемом электроприводе, содержащее датчик составляющих вектора потокосцепления ротора асинхронного двигателя, два сумматора, два фильтра низкой частоты, два элемента сравнения, два релейных элемента, первый формирователь логических сигналов обратных связей в контурах регулирования координат асинхронного двигателя, снабженный двумя парами входов, четыре блока умножения, первые входы первого и третьего, второго и четвертого бло- ков умножения объединены попарно и подключены к первому и второму выходам указанного первого формирователя логических сигналов, выходы первого и второго, третьего и четвертого блоков умножения подключены соответственно через первый и второй сумматоры к входам первого и второго фильтров низкой частоты, выходы которых подключены соответственно к пер- вым входам первого и второго элементов сравнения, выходы которых соот986
ветственно через первый и второй релейные элементы подключены к первой паре входов указанного первого формирователя логических сигналов, вторая пара входов которого объединена по- фазно с выходами датчика составляющих вектора потокосцепления ротора и подключена к объединенным попарно вторым входам первого и четвертого, второго и третьего блоков умножения, отличающееся тем, что, с целью расширения функциональных возможностей путем определения моду:7я вектора потокосцепления ротора и составля- ю{11Их единичного вектора потокосцепления ротора, введены шесть фильтров - низкой частоты, третий и четвертый суМ маторы, третий и четвертый элементы
сравнения, третий и четвертьй релейные элементы, второй формирователь логических сигналов обратных связей в контурах регулирования координат асинхронного двигателя, снабженный двумя
парами входов, пятый, шестой, седьмой и восьмой блоки умножения, причем первые входы пятого и седьмого, шестого и восьмого блоков умножения попарно объединены и подключены соответственно к первому и второму выходам
указанного второго формирователя логических сигналов, выходы указанного первого формирователя логических сигналов подключены соответственно к входам третьего и четвертого фильтров низкой частоты, выходы которых подключены соответственно к объединенным попарно вторым входам пятого и восьмого, шестого и седьмого блоков умножения, выходы пятого-и шестого, седьмого и восьмого блоков умножения подключены соответственно через третий и четвертый сумматоры к входам пятого и шестого фильтров низкой частоты, выходы которых подключены соответственно к первым входам третьего и четвертого элементов сравнения, выходы которых соответственно через третий и четвертый релейные элементы подключены к первой паре входов указанного второго формирователя логических сигналов, вторая пара входов которого объединена пофазно с и 1хода- ми датчика составляющих вектора потокосцепления ротора и подключена к вторым входам третьего и четвертого
элементов сравнения, первый и второй выходы указанного второго фop fиpoвa- теля логических сигналов подключены
7U153988
к входам седьмого и восьмого фильт- подключены к вторым входам первого ров низкой частоты, выходы которых и второго элементов сравнения.
VliZ.l
| Гусяцкий Ю.М | |||
| Синтез быстродействующей системы частотно-управляемого асинхронного электропривода | |||
| - Электричество, 1982, № 10, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| СКЕЛЕТНЫЙ МЕДНОЦИНКАЛЮМИНИЕВЫЙ КАТАЛИЗАТОР | 0 |
|
SU241399A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
