О
со
цг.2
Изобретение относится к области устройств для автоматического вождения транспортных средств, преимущественно дорожных катков, в условиях дорожного строительства, в сельском хозяйстве, а также при ресурсных испытаниях транспортных средств на надежность и долговечность.
Целью изобретения является расширение функциональных возможностей устройства путем обеспечения периодического бокового смещения транспортного средства по ширине полосы движения.
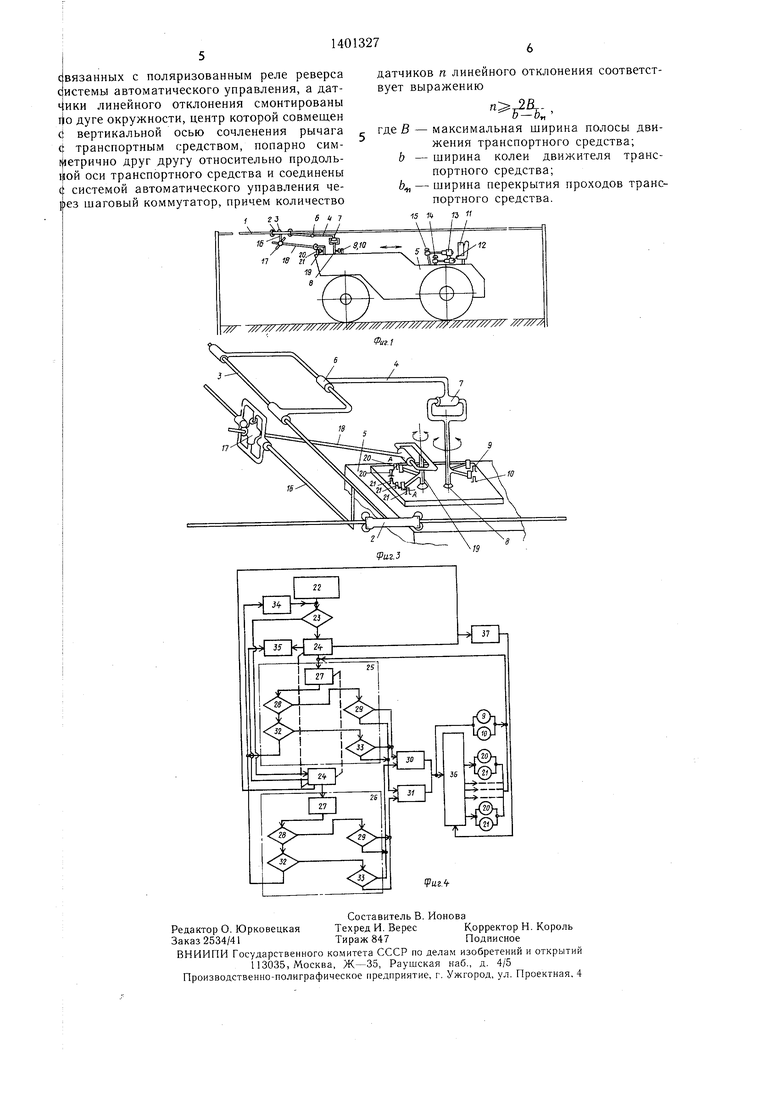
На фиг. 1 схематично показано устройство для автоматического вождения транспортного средства, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема соединения траверсы с датчиками; на фиг. 4 - блок-схема системы автоматического управления транспортным средством.
Устройство содержит направляющие 1, выполненные в виде тросов, натянутых вдоль полосы движения транспортного средства, на которых установлены с возможностью j продольного перемещения тележки 2, соединенные посредством поперечной тяги 3 с рычага 4 с транспортным средством 5, преимущественно дорожным катком. Рычаг 4 выполнен сочлененным при помощи цилиндрических шарниров 6-8 с взаимно перпендикулярными осями. Радиально относительно вертикальной оси цилиндрического шарнира 8 смонтированы датчики 9 и 10 курсового отклонения, например, бесконтактного ин дуктивного типа (фиг. 2 и 3), которые соединены через систему 11 автоматического управления с приводами роботов-манипуляторов 12 и 13, смонтированных соответственно на органах управления поворотом 14 и реверсом 15 транспортного средства 5. На поперечной тяге 3 жестко закреплена параллельная ей траверса 16, на которой установлен гироскопический шарнир 17, соединенный с рычагом 18 с возможностью I продольного перемещения относительно не- : го. Рычаг 18 закреплен с возможностью поворота относительно вертикальной оси 19 на транспортном средстве 5 и снабжен дат- :чиками 20 и 21 линейного отклонения соответственно вправо и влево. Датчики 20 и 21 смонтированы попарно симметрично друг другу относительно продольной оси транспортного средства 5 по дуге АА окружности, центр которой совмещен с вертикальной осью 19, и также соединены посредством системы 11 автоматического управления сприводами роботов-манипуляторов 12 и 13. Количество датчиков 20 и 21 линейного отклонения определяется соотношением
где п - количество датчиков 20 и 21 линейного отклонения;
В - максимальная ширина полосы движения транспортного средства 5 (фиг. 2);
5
b - ширина колеи движителя транспортного средства 5; Ь„- ширина перекрытия проходов транспортного средства 5.
Система 11 автоматического управления
содержит блок-задатчик 22 частоты реверсирования, соединенный через конечный логический элемент ИЛИ 23 и поляризованное реле 24 реверса с двумя одинаковыми блоками 25 и 26 управления. Каждый из
блоков 25 и 26 содержит на входе блок- задатчик 27 частоты контроля поворотов транспортного средства 5, соединенный с логическим элементом 28 курсового отклонения. Один из выходов тогического элес мента 28 соединен с логическим элементом 29 направления поворота, выходы которого связаны с исполнительными приводами 30 и 31 робота-манипулятора 12 поворота вправо и влево транспортного средства. Другой выход логического элемента 28 соединен
0 с логическим элементом 32 линейного отклонения, один из выходов которого через дополнительный логический элемент 33 направления поворота аналогичным образом соединен с приводами 30 и 31 робота-манипулятора 12, а другой выход элемента 32 связан с исполнительным приводом 34 робота-манипулятора 12, управляющего переключением в нейтральное положение органа 14 управления поворотом транспортного средства 5. Одновременно поляризованное реле 24
Q соединено с исполнительным приводом 35 робота-манипулятора 13, управляющего переключением органа 15 управления реверсом транспортного средства 5 для движения вперед и назад.
Датчики 20 и 21 линейного отклонения
с транспортного средства 5 связаны с системой 11 автоматического управления через шаговый коммутатор 36 известной конструкции, привод которого соединен со счетчиком 37 циклов. Носледний соединен с поляризованным реле 24 реверса.
0 Устройство для автоматического вождения транспортного средства работает следующим образом.
Перемещение транспортного средства 5 вдоль полосы движения, одновременно
г е которым происходит перемещение тележек 2 с тягой 3 и траверсой 16 по направляющим 1, сопровождается постоянным курсовым и линейным боковым уводом транспортного средства вследствие действия случайных факторов - неровностей и неравно0 мерностей жесткости дорожного покрытия и т. п. Предельно допустимая величина бокового увода транспортного средства 5 вызывает поворот рычага 4 и включение датчиков 9 и 10 курсового отклонения, а также поворот рычага 18 относительно гироскопи5 ческого шарнира 17 и включение одной из пар датчиков 20 и 21 линейного отклонения. Датчики 9, 10, 20 и 21 обеспечивают подачу сигнала о боковом уводе системе 11 автоматического управления, которая подает посредством поляризованного реле 24 реверса сигналы через блоки 25 или 26 в зависимости от направления движения транспортного средства вперед или назад, определяемого конечным логическим элементом ИЛИ 23. Одновременно поляризованное реле 24 подает сигнал приводу 35 робота- манипулятора 13 реверса для включения органа 15 управления реверсированием в положение «Вперед или «Назад. Если транспортное средство движется вперед, сигналы анализируются блоком 25, при этом в случае отклонения по курсовому углу, которое определяется логическим элементом 28 путем опроса датчиков 9 и 10, определяется, какое именно имеется отклонение - вправо или влево с помощью логического элемента 29. При наличии отклонения вправо выдается сигнал включения привода 30 робота-манипулятора 12 влево, а при отклонении влево - сигнал включения привода 3-1 робота-манипулятора 12 вправо. При отсутствии курсового отклонения сиг- налы от датчиков проходят на второй контур к логическому элементу 32 линейного отклонения, который определяет, имеется ли линейное боковое отклонение транспортного средства по полосе движения путем опроса датчиков 20 и 21. Если линейное отклонение имеется, то логическим элементом 33 определяется, какое именно имеется отклонение. При отклонении вправо выдается сигнал приводу 30 робота-манипулятора 12 на поворот влево, при отклонении влево - приводу 31 робота-манипулятора 12 на поворот вправо. Отсутствие курсового и линейного отклонения обеспечивает подачу сигнала приводу 34 робота-манипулятора 12 на возвращение органа 14 управления поворотом в нейтральное положение. После этого цикл анализа повторяется с возвратом в исходное положение к конечному логическому элементу ИЛИ 23. Если конечный логический элемент фиксирует, что имеется направление движения транспортного средства назад, то сигналы от датчиков 9, 10, 21 и 22 таким же образом анализируются блоком 26, соединенным с отрицательным выходом поляризованного реле 24, которое выдает одновременно сигнал приводу 35 робота-манипулятора 13 на переключение органа 15 реверса в положение «Назад. При наличии в этом случае курсового отклонения, определяемого логическим элементом 28, транспортного средства вправо, что определяется логическим элементом 29, выдается сигнал приводу 31 робота-манипулятора 12 включить орган 14 управления вправо, а при курсовом отклонении влево приводу 30 робота-манипулятора 12 подается сигнал на поворот влево. При отсутствии курсового отклонения анализируется наличие линейного отклонения логическим элементом 32. Линейное отклонение вправо, определенное
логическим элементом 33, обеспечивает сигнал приводу 30 робота-манипулятора 12 на поворот влево, отклонение влево - сигнал приводу 31 робота-манипулятора 12
на поворот вправо. При отсутствии курсового и линейного отклонения или его восстановлении снова выдается сигнал приводу 34 робота-манипулятора 12 установить орган 14 управления поворотом в нейтральное положение. После этого осуществляется возврат к входу конечного логического элемента ИЛИ 23 анализа направления движения, и цикл повторяется.
Счетчик 37 циклов суммирует сигналы по реверсированию, поступающие от поляризованного реле 24. При достижении заранее заданного количества циклов реверсирования, соответствующего потребному количеству проходов транспортного средства 5 по одному месту, например при уплотнении дорожного покрытия, счетчик 37 циклов выдает сигнал на привод шагового коммутатора 36, который осуществляет подключение к системе 11 автоматического управления следующей пары датчиков 20 и 21 линейного отклонения. Тем самым производятся переход транспортного средства 5 на новый участок по щирине полосы движения и автоматическая регулировка там направления движения.
30
Формула изобретения
Устройство для автоматического вождения транспортного средства, преимущественно дорожного катка, содержащее направляющие с тележками, связанными меж5 ду собой посредством параллельно расположенных тяги и траверсы, шарнирно со- члененнЬ1х рычагами с транспортным средством, систему автоматического управления, соединенную с приводами роботов-манипуQ ляторов, смонтированных на органах управления поворото.м и реверсом транспортного средства, датчики курсового и линейного отклонений, установленные радиально относительно осей сочленения рычагов с транспортным средством, блок-задатчик частоты
5.реверсирования, соединенный с входом логического элемента ИЛИ, выходы которого соединены с входами поляризованных реле реверса, выходы которых соединены с входами задатчиков частоты контроля поворотов транспортного средства, выходы которых
0 через логические элементы курсового отклонения и направления поворота соединены с приводами упомянутых роботов-манипуляторов, отличающееся тем, что, с целью расщирения функциональных возможностей устройства путем обеспечения периодического бокового смещения транспортного средства по щирине полосы движения, оно снабжено соединенными между собой щаго- вым коммутатором и счетчиком циклов.
5
связанных с поляризованным реле реверса системы автоматического управления, а дат- 1ики линейного отклонения смонтированы I о дуге окружности, центр которой совмещен d вертикальной осью сочленения рычага 4 транспортным средством, попарно сим- i eтpичнo друг другу относительно продоль- 1рой оси транспортного средства и соединены системой автоматического управления че- toes шаговый коммутатор, причем количество
датчиков п линейного отклонения соответствует выражению
Д;.
где В - максимальная ширина полосы движения транспортного средства;
b - ширина колеи движителя транспортного средства;
Ь - ширина перекрытия проходов транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения транспортного средства | 1981 |
|
SU949383A1 |
| Устройство автоматического управления движением транспортного средства | 1973 |
|
SU471872A1 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| Тренажер для обучения вождению гусеничных машин | 1983 |
|
SU1164767A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ УКАЗАТЕЛЕМ ПОВОРОТА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УКАЗАТЕЛЕМ ПОВОРОТА | 2017 |
|
RU2746553C1 |
| МОТОЦИКЛ С ВЫДВИЖНОЙ УСТАНОВКОЙ СО СНАБЖЕННЫМИ ЛЕЗВИЯМИ ЛЫЖАМИ | 2016 |
|
RU2666062C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
Изобретение относится к устройствам для автоматического вождения транспортных средств, преимущественно дорожных катков, в условиях дорожного строительства и в сельском хозяйстве. Цель изобретения - расширение функциональных возможностей устройства путем обеспечения периодического бокового смещения транспортного средства по щирине полосы движения. Устройство содержит направляющие 1 с тележками 2, соединенными посредством тяги 3 с параллельной ее траверсой 16 и шарнирно сочлененных рычагов 4 и 18 с транспортным средством 5, а также систему автоматического управления 11,связанную с приводами роботов-манипуляторов 12 и 13 управления поворотом и реверсом и снабженную датчиками 9, 10 курсового и 20, 21 линейного отклонений, установленными радиально относительно осей сочленения рычагов 4 и 18 с транспортным средством 5, блок-задатчи- ком частоты реверсироваия, логическим элементом ИЛИ, поляризованным реле реверса, шаговым коммутатором и счетчиком циклов. Счетчик циклов суммирует сигналы по реверсированию, поступающие от поляризованного реле. При достижении заданного количества проходов счетчик циклов выдает сигнал на привод шагового коммутатора, осуществляющего подключение к системе автоматического управления 11 следующей пары датчиков 20 и 21. 4 ил. с S
//////////////////////у///////7/77////// /f7//////////// ///////
Фиг. 1
Vui. f
| Устройство для автоматического вождения транспортного средства | 1981 |
|
SU949383A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
