а.
ИЗ 1У гч I if /
sff ft 25 us
Фаг.з
1Л
СП
Изобретение отиоситсл к трубогфо- нодиог у пневмотранспорту, я нмеиио к устанопхе для трубопроводного пневмотранспорта т рузоп.
Цель изобретения - повышение на- дежнбсти
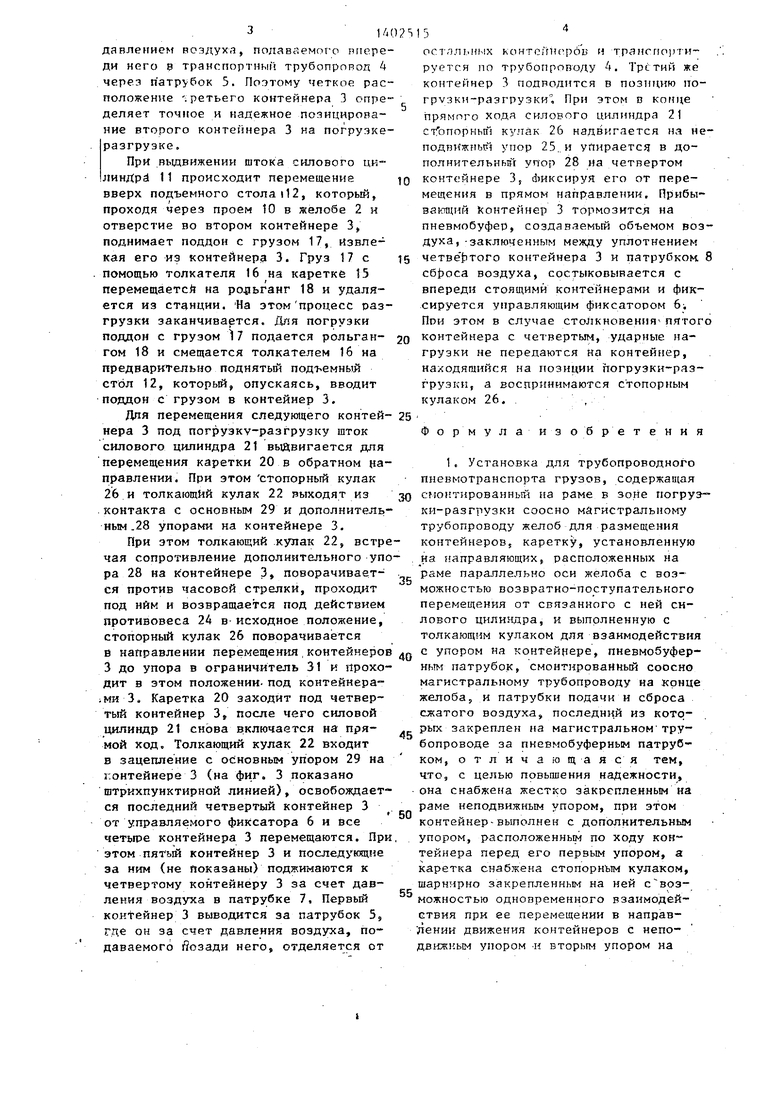
На фиг„ 1 показана установка, общий вид; на фиг о 2 - разрез Л-Л на фиг. I; на фиг, 3 - узел I на фиг, 2,
Установка содержит раму 1, на которой закреплен желоб 2 для перемеще- ник по нему контейнеров 3 в позицию погрузки-разгрузки и из нее. Желоб 2 Состыкован с магистральньм трубопро- водом А, на котором смонтирован патрубок 5 для подачи воздуха от воз- духодувкя (не показана). Трубопровод может быть замкнут в кольцо.
На желобе 2 размещен управляемый фиксатор 6 о Позади желоба 2 расположен пневмобуферньй патрубок 7, служащий дня торможения на воздушную подушку и ,цля остановки контейнеров 3 перед желобом 2, а также патрубок 8 сброса воздуха. Желоб 2 имеет прямоугольную форму и выполнен с продольной щелью 9 и проемом 10 для подъемного от гидроцгатиндра 11 стола 12, На позиции погрузки-разгрузки над подъёмным столом 12 расположены поперечные направляющие 13 с приводной от силового цгчликдра 14 кареткой
15,j несущей толкатель 16 ,цля груза 17, Параллельно г.елобу 2 расположены рольганги 18 для подачи и удаления груза 17 с позиции погрузки-разгрузки. ПаралДельно желобу 2 на раме 1 за- крепленьз направляющие 19 с установ ленной в них кареткуй 20 имеющей . зоэможне-сть прямого и обратного хода посредством связанного с ней силово- го цилиндра 21. На каретке 20 шарнир- ко закреплен толкающий кулак 225 име- лсгцкй возможность свободного поворота в напраЕлении дзижезння контейнероЕ 3 и ограниченного поворота до упора 23 3 противоположном направлении.
Для поворота толкающего кулака 2J н искодное положение до.упора 23 толкающий кулак 22 выполнен с дисбалан- сом относительно оси вращения, напри- йер с помощью противовеса 24, Ни ра- .ме 1 жестко закреплен неподвижный упор 25 а каретка 20 снабжена взаимодействуюа(1м с ним стопоряьгм кула- ко-м 26, шярнирно закрепленным на оси 27 с возможностью одновременного взаимодейст.вия в конце прямого хопа
0 5 0
5
S
ч
кар€П ки 20 своей передней частью с негюдвиж ным упором 25, а задней частью - с выполненным в задней контейнера 3 дополнительным упором 28 о Уп ор -29 расположен с возможнбстью - взаимодействия с толкающим кулаком 22, Стопорный кулак 26 в кфнце прямого хода каретки 20 расположен.со / смешением центра тяжести (ЦТ) относительно своей оси 27 в направлении перемещения контейнеров 3.
В стопорном кулаке 26 выполнена выемка а, а на неподв.ижном упоре 25 - ойорньй выступ 30, расположенный с возможностью взаимодейстйия с выемкой а. На каретке 20 закреплен ограничитель 31 поворота стопорного о кулака 26 в направлении Движения кон-, тейнеров 3. В исходном положении кон- тейнеры 3 располагаются в желобе 2. Первый и четвертый контейнеры 3 . (фиг. 2) являются пневмозаглущкамК, .. препятствующими проходу воздуха в . желоб 2. Управляемый фиксатор 6 выдвинут и удерживает последний четвертый контейнер (фиг. 2) и ate остальные контейнеры,3 перед ним от перемещения поД действием давления воздухаs подаваемого через патрубок 5, Второй контейнер расположен над подъемным столом 1.. Шток силового цилиндра 2t , задвину и третий контейнер 3 нахо- дится в зафиксированном положении с помощью толкающего кулака 22, . роющегося в основной упор 29 на контейнере 3j к стопорного кулака 26, упирающегося в конце прямого хода йа- ретки 20 одновретугенно своей передней частью в неподвижный упор 25 а своей частью - в дополнительный упор 28 о При этом расположение опорного высту па 30 в выемке а исключает пвоеда- . чу ударных нагрузок через каретку на шток силового цилиндра 21. В ре- . . зультате третий контейнер 3 (фиг.2) оказываеч ся четко зафиксированным от смещения вперед в случае столкновения вновь прибывающего контейнера. 3 с уже установленными и состьссован™ ньмк контейнерами к от смещения назад i
Третий контейнер 3, будуч . зафиксированным от всякого смещения, является как бы жестким упором позади второго контейнера 3, находяй егося ;тод погрузкой-разгрузкой, Спереди же , второй контейнер зафиксирован посредством йервого контейнерАз удерживае-г мого от смещения «п. избыточным
31/4
яaвлeииe f воздуха, подаваемого впереди него 0 тракспортныГ трубопровод 4 через патрубок 5, Поэтому четкое расположение третьего контейнера 3 определяет точное и надежное поэицирова- ние второго контейнера 3 на погрузке разгрузке.
При выдвижении штока силового ци- линДрй 11 происходит перемещение вверх подъемного стола i12, который, проходя через проем 10 в желобе 2 и отверстие во втором контейнере 3, поднимает поддон с грузом 17, извлекая его из контейнера 3. Груз 17 с помощью толкателя 16 на каретке 15 перемещаетсй на рольганг 18 и удаляется из станции. На этом процесс разгрузки заканчивается. Для погрузки поддон с грузом 17 подается рольган- ГСМ 18 и смещается толкателем 16 на предварительно поднятый подъемный стол 12, который, опускаясь, вводит поддон с грузом в контейнер 3.
Для перемещения следующего контей- мера 3 под погрузку-разгрузку шток силового цилиндра 21 выдвигается для перемещения каретки 20 в обратном направлении. При этом стопорный кулак 26 и толкающий кулак 22 зыходят из
.контакта с основным 29 и дополнительным .28 упорами на контейнере 3.
При этом толкающий кулак 22, встречая сопротивление дополнительного упора 28 на контейнере 3, поворачивается против часовой стрелки, проходит под ним и возвращается под действием противовеса 24 в исходное положение, стопорный кулак 26 поворачивается в направлении перемещения,контейнеров 3 до упора в ограничитель 31 и проходит в этом положении- под контейнера;ми 3. Каретка 20 заходит под четвертый контейнер 3, после чего силовой цилиндр 21 снова включается на прямой ход. Толкающий кулак 22 входит в зацепление с основным yhopoM 29 на контейнере 3 (на фиг. 3 показано штрихпунктирной линией), освобождается последний четвертый контейнер 3 от управляемого фиксатора 6 и Все четыре контейнера 3 перемещаются. При этом пятый контейнер 3 и последующие за ним (не показаны) поджимаются к четвертому контейнеру 3 за счет давления воздуха в патрубке 7, Первый контейнер 3 выводится за патрубок 5, где он за счет давления воздуха, подаваемого йозади него, отделяется от
0
5
0
5 о
Q
5
5
0
5
контойнпроБ н транспо))7 И руется по трубопроподу 4. Третий же контейнер 3 подводится в позицию по- грузки-разгрузки. При этом п конце прямого ходя силового цилиндра 21 ст опорньш кулак 26 надвигается на не- подв1 ж;иьрЧ упор 25„и упирается в дополнительный упор 28 на четвертом контейнере 3, diHKCHpyH его от перемещения в прямом напр:авлетжи. Прибы- ваьлщнй Контейнер 3 тормозится на пневмобуфер, создаваемый объемом воздуха, -заключенным между уплотнением четве 1зтого контейнера 3 и патрубком 8 c6t)oca воздуха, состыковывается с впереди стоящими контейнерами и фиксируется управляющим фиксатором Ь, Пои этом в случае столкновения пятого контейнера с четвертым, ударные нагрузки не передаются на контейнер, находящийся на позиции погрузки-раз- грузк и, а воспринимаются стопорным кулаком 26. . ,,
Формулаиз обретения
1, Установка для трубопроводного пневмотранспорта грузов, содержащая смонтированный на раме в зоне погруэ ки-разгрузки соосно магистральному трубопроводу желоб для размещения контейнеров, каретку, установленную на направляющих, расположенных на раме параллельно оси желоба с возможностью возвратно-поступательного перемещения от связанного с ней силового цилиндра, и выполненную с толкающим кулаком для взаимодействия с упором на контейнере, пневмобуфер- Hbw патрубок, смонтированный соосно магистральному трубопроводу на конце желоба, и патрубки подачи и сброса сжатого воздуха, последн1-1й из которых закреплен на магистральном трубопроводе за пневмобуферным патрубком, отличающаяся тем, что, с целью повышения надежности, она снабже {а жестко закрепленным на раме неподвижным упором, при этом контейнер-выполнен с дополнительным упором, расположенньм по ходу контейнера перед его первым упором, а каретка снабжена стопорнЪ1М кулаком, шарнирно закрепленным на ней с возможностью одновременного взаимодействия при ее перемещении в направ- лении движения контейнеров с непо- движным упором -н вторым упором на
контейнере, при этом патрубок подачи сжатого воздуха расположен перед желобом на расстоянии от него не менее длины контейнера,
а
2о Установку по л, 1, отличающаяся тем, что стопорный кулак выполнен со смещением центра
тяжести относительно оси шарнира в направлении к толкающему кулаку. 3. Установка по п.. 2, отличающаяся тем, 4то стопорный кулак со стороны, обращенной к толкающему кулаку, выполнен с выемкой, а неподвижный упор - с зыступам под вЫемку.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЬЦЕВАЯ МНОГОКОНТЕЙНЕРНАЯ СИСТЕМА ТРУБОПРОВОДНОГО КОНТЕЙНЕРНОГО ПНЕВМОТРАНСПОРТА | 2015 |
|
RU2628821C2 |
| СТАНЦИЯ ВВОДА/ВЫВОДА КОНТЕЙНЕРОВ В СИСТЕМЕ ТРУБОПРОВОДНОГО КОНТЕЙНЕРНОГО ПНЕВМОТРАНСПОРТА | 2017 |
|
RU2675008C1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Станция погрузки-разгрузки установки трубопроводного пневмотранспорта контейнеров | 1986 |
|
SU1440825A1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
| Комплексно-механизированная линия погрузки пищевых продуктов | 1986 |
|
SU1416396A1 |
| Установка пневмоконтейнерного транспорта | 1987 |
|
SU1710467A1 |
| Станция погрузки-разгрузки перемещаемого по пневмотрубопроводу контейнера с торцовыми крышками | 1987 |
|
SU1497133A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |

| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Научно-технический обзор Мин | |||
| газо- | |||
| вой промышленности СКВ Газстроймаши- на, М., 1972, с | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
