Известен хлебоукладочный агрегат, включающий подающий и приемный вертикальные цепные полочные элеваторы, расположенный между ними подъемно-опускной стол для установки и фиксации контейнера, устройство для одновременной перегрузки лотков с хлебом с полок подающего элеватора на нолки контейнера и порожних лотков с полок контейнера на полки приемного элеватора, устройство для досылания порожних лотков, устройство для горизонтального шагового перемещения лотков с полок приемного на полки подающего элеватора, снабженного щарнирными, попарно закрепленными на осях толкателями, расположенного сбоку полочных элеваторов, и устройство для укладки хлеба в лотки, размещенного над устройством для шагового перемещения лотков.
Предложенный агрегат но сравнению с известным более компактен, проще по конструкции и надежнее в работе.
Это преимущество достигается тем, что у тройство для горизонтального перемещения лотков расположено между полочными элеваторами в их верхней части, причем его толкатели соединены между собой тягой, толкатели одной из пар снабжены упорами, а на их осях посажены рычаги, взаимодействующие прн холостом ходе устройства с неподвижными копирами и упорами толкателей.
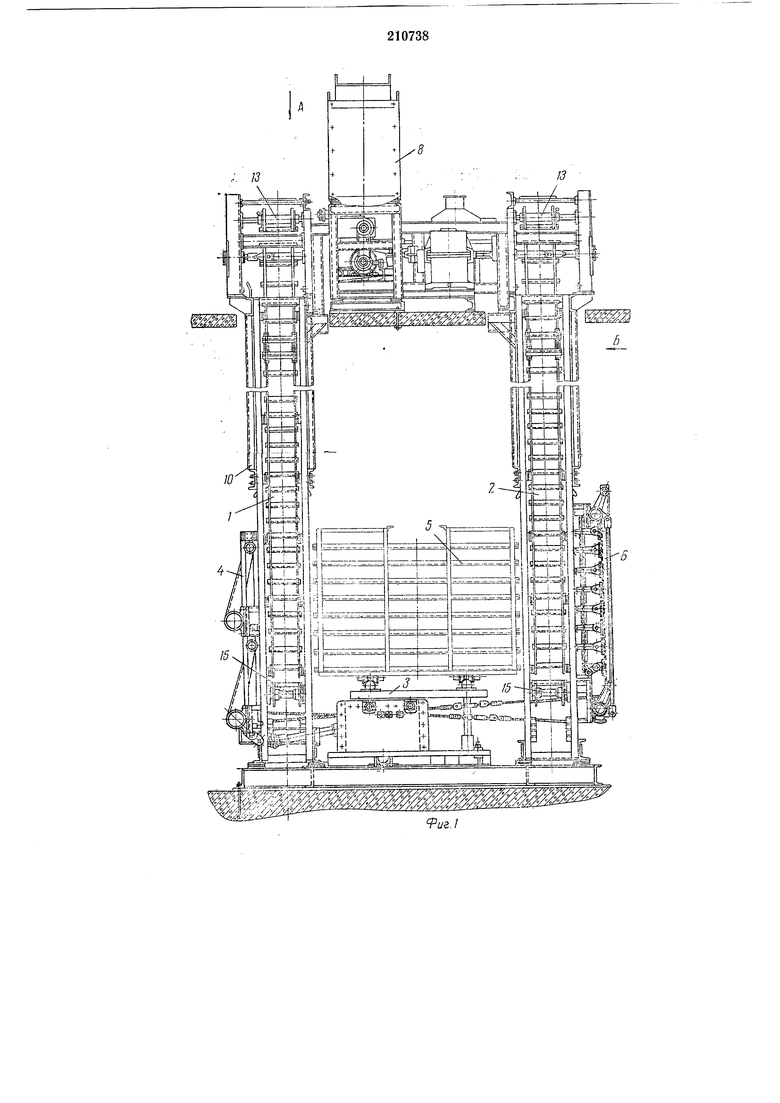
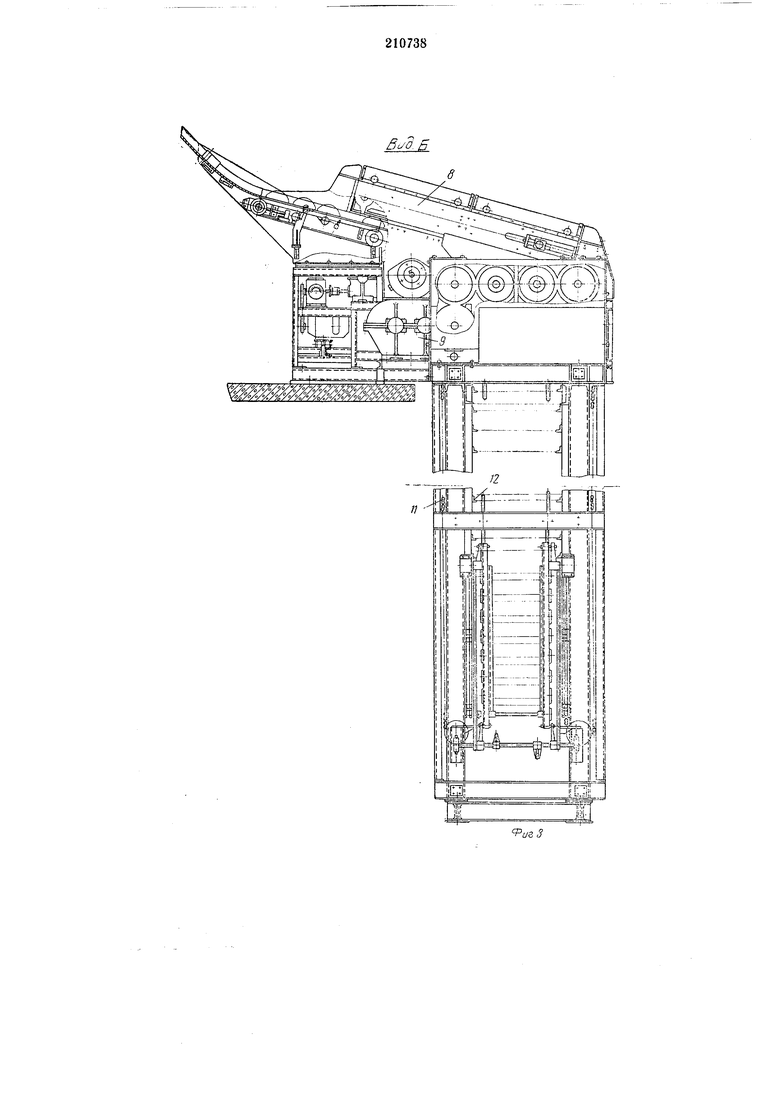
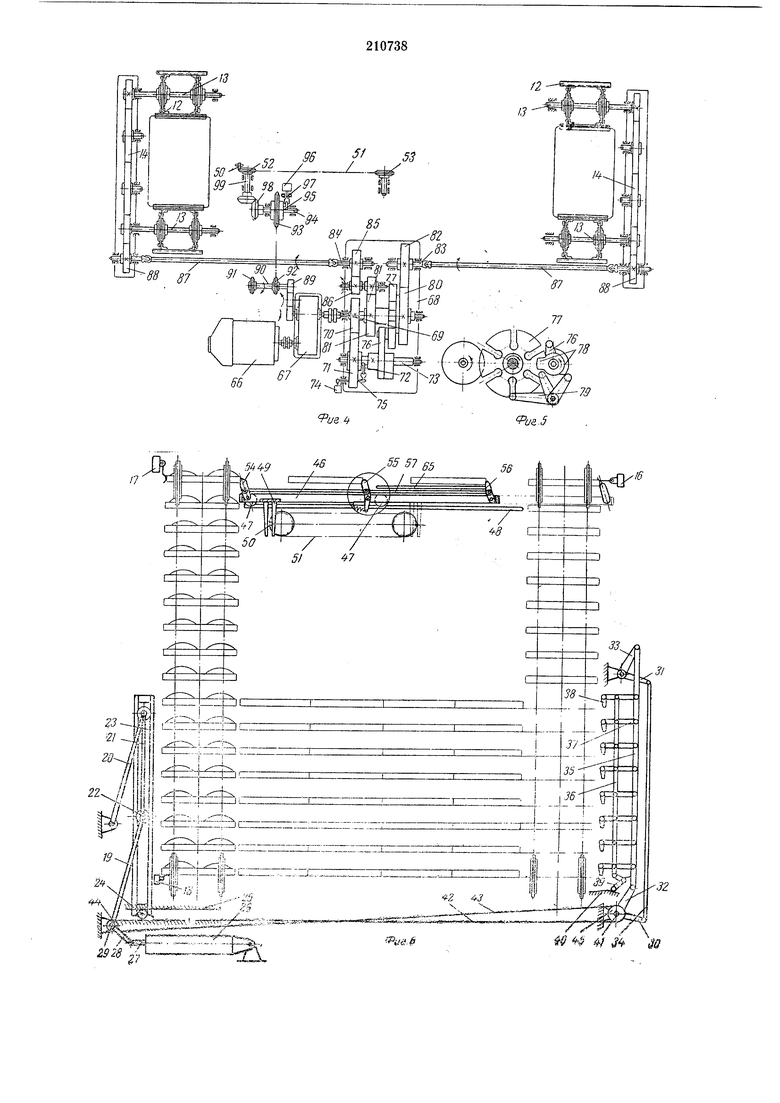
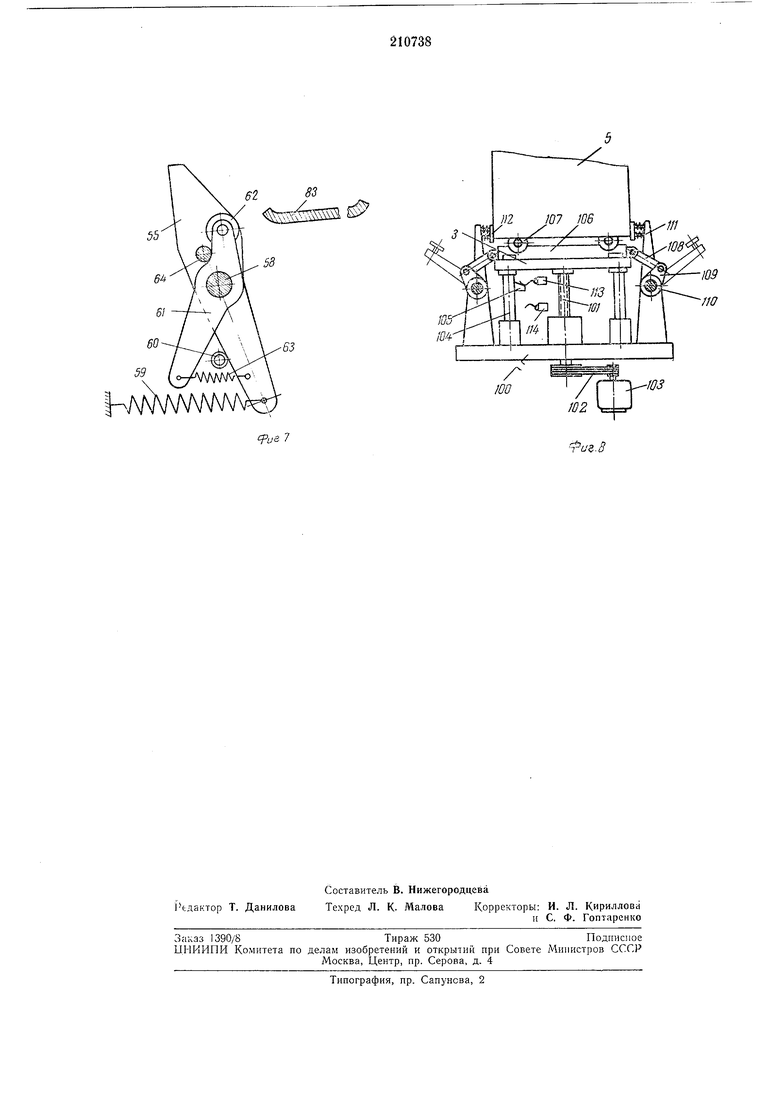
Па фиг. 1 показан агрегат, общий главный Бнд; на фиг. 2 - вид по стрелке А на фиг. I; на фиг. 3 - вид по стрелке Б на фиг. 1; на фиг. 4 - схема привода полочных элеваторов и устройства для горизонтального щагового перемеш.ения лотков; на фиг. 5 - схема мальтийского механизма Дочя шагового перемещения полочных элеваторов; на фиг. 6 - схема устройства для горизонтального шагового перемепдения лотков, устройства для перегрузкп лотков с хлебом и порожних лотков и устройства для досылания порожних лотков; на фиг. 7 - толкатель устройства для горизонтального шагового перемещения лотков; на фиг. 8 - подъемно-опускной стол для установки и фиксации контейнера.
Агрегат состоит из следующих основных частей: подающего п приемного вертикальных HenHFjix полочных элеваторов / и 2, расноложенных по обе стороны подъемно-опускного стола 3 с платформой для установки и фиксации контейперОВ; устройства 4 для одновременной перегрузки лотков с хлебом с полок подаюи его элеватора / на полки контейнера 5 и порожних лотков с полок контейнера на нолки приемного элеватора 2; устройства 6 для досылания порожних лотков, устройства 7 для горизонтального шагового перемещения лотков от приемного к подающему элеватору
и размещенного над устройством 7 устройства 8 для укладки хлеба в лотки.
Элеваторы 1 и 2 и устройство горизонтального перемещения лотков приводятся в движение от главного иривода 9. Назначение элеватора 2 - прием порожних лотков, разгружаемых из поступившего на погрузку контейнера 5, и подача их вверх на загрузку хлебными изделиями. Назначение элеватора 1 - подача лотков, заполненных хлебными изделиями, вниз на позицию ввода в контейнер 5. Каждый элеватор состоит из шахтной металлоконструкции 10, внутри которой размещено по два вертикальных цепных транспортера 11 с полками 12, служащими для установки лотков.
Приводные валы 13 обоих транспортеров соединены между собой зубчатой передачей 14, врашающей их в противоположных направлениях. Движение транспортеров прерывистое от шагового механизма, описанного ниже. Перемещение цепей за один ход равно вертикальному шагу полок 12 и происходит одновременно вверх у приемного элеватора и вниз у подающего.
Расположенные в нижней части элеваторов валы 15 транспортеров являются натялсными, натяжение цепей производится грузами (на чертеже не показаны).
На элеваторах смонтированы три электрических датчика 16, 17 н 18, соответственно, контролирующий поступление пустых лотков, контролирующий поступление лотков, заполненных хлебом, на верхнюю полку подающего элеватора 1 и контролирующий поступление лотков, заполненных хлебом, на позицию загрузки в контейнер 5. Устройство для перегрузки лотков с хлебом и порожних лотков состоит из двух спаренных механизмов, каждый из которых включает четырехшарнирный параллелограмм, образованный рычагами-кривошипами 19, 20 и шатуном 21. На осях шарниров параллелограмма срлонтированы ролики 22, скользящие в пазу кулисы 23. Ролик 24, смонтированный на кулисе, может перемещаться в пазу, образованном направляющими 25. В этой схеме кулиса имеет одну степень свободы - в горизонтальном направлении (в плоскости чертежа).
Устройство приводится в движение гидравлическим приводом при помощи силового гидроцилиндра 26, шток 27 которого шарнирно соединен с рычагом 28, закрепленным на том же валу 29 четырехшарнириого параллелограмма, на котором жестко смонтированы его рычаги 19.
Устройство 6 для досылания порожних лотков состоит из двух спаренных механизмов, объединенных общими осями. Каждый механизм имеет в своей основе сдвоенные четырехшарнирные параллелограммы, образованные рычагами-кривошипами 30, 31, 32, 33 и шатунами 34 и 35. На шатуне 35 смонтирован, в свою очередь, шарнирный многозвенник, образованный штангой 36 и рычажками 37 с подпружиненными захватами 38 по числу перемещаемых лотков, и шарнирно установлен двуплечий рычаг 39, соединенный шарниром со штангой 36. Установленный на рычаге 39 ролик скользит по копиру 40, определяя таким способом вертикальное положение штанги 36 и ири помощи захватов 38.
Вал 41 устройства для досылания пустых лотков приводится в качательное движение от
вала 29 при помощи двух перекрестных тросов 42, 43, прикрепленных к роликам 44, 45 жестко смонтированным на валах 29, 41.
стройство для горизонтального перемещения лотков предназначено для шагового перемещения лотков с полок приемного элеватора 2 последовательно на позицию санитарной обработки, на позицию укладки хлеба и на полки подающего элеватора /. Основой механизма является каретка 46,
которая на четырех роликах 47 катится по направляющим 48. На каретке смонтирована кулиса 49, в паз которой входит ведущий ролик 50, укрепленный на цепи 61, охватываюш,ей звездочки 52 и 53. Расстояние между
крайними положениями оси ролика 50 определяет длину хода возвратно-поступательного движения каретки 46.
На каретке шарнирно закреплены три пары толкателей 54, 55, 56, соединенные собой по схеме параллелограмма тягой 57. Средняя пара толкателей 55, сидящая на осях 58, прижимается пружинами 59 к упорам 60, принадлежащим каретке 46.
На осях 58 сидят также рычаги 61 с роликами 62. Рычаги 61 притягиваются пружинами 63 к упорам 64, принадлежащим толкателям 55. На каркасе устройства смонтированы коииры 65, служащие для утапливания толкателей при возвратном ходе каретки. Благодаря этому уетройству при холостом ходе каретки (вправо) рычаги 61 отклоняются копиром вместе е толкателями 54, 55, 56, а при рабочем ходе каретки (влево) отклоняются только рычаги 61.
В состав главного привода 9 входят электродвигатель 66, стандартный редуктор 67, шаговый механизм 68 и трансмиссионные устройства. Шаговый механизм 68 представляет собой
многовальную коробку. От редуктора 67 вращение передается входному валу 69, на котором жестко закреплена шестерня 70, находящаяся в зацеплении с зубчатым колесом 71. В ступицу иоследнего встроена однооборотиая муфта с поворотной шпонкой 72, соединяющей колесо 71 с валом 73 при включении электромагнита 74, воздействующего на шпонку 72 при помощи рычага 75. На Балу 73 жестко закреплено водило 76, взаимодействующее с мальтийским крестом 77, Вместе с водилом закреплены кулачки 78, воздействующие на трехплечий рычаг 79, запирающий мальтийский крест в периоды остановок. Мальтийский крест 77 выполнен с зубчабодно сидит на валу 69. Колесо 80 находится в прямом зацеплении с зубчатым колесом 82, жестко сидящим на выходном валу 83. Колесо 81 соединено со вторым выходным валом 84 при помощи зубчатого колеса 55 и паразитного блока 86, служащего для изменения направления вращения.
Благодаря описанной кинематической схеме непрерывно вращаемый щаговый механизм 68 осуществляет по получении электрического импульса прерывистое угловое перемещение выходных валов в противоположных направлениях. Выходные валы 83, 84 при помощи промежуточных валов 87 передают движение щестерням 88, находящимся в зацеплении с зубчатой передачей 14 приводных валов 13 элеваторов / и 2,
Зубчатая передача 89 связывает редуктор 67 с промежуточным валом 90. От этого вала приводятся в движение ленточный транспортер устройства для укладки хлеба в лотки при помощи цепной передачи от звездочки 91; устройство горизонтального перемещения лотков при помощи цепной передачи от звездочки 92 к звездочке 93, соединенной с валом 94, встроенной однооборотной муфтой с поворотной щпонкой 95, включаемой от электромагнита 96 рычажком 97. Далее коническая пара 98 передает вращение валику 99, на котором сидит звездочка 52.
Для точной установки поступающего под загрузку контейнера по отнощению к элеваторам и фиксации контейнера на период загрузки подъемно-опускной стол 3 снабжен центрирующими и фиксирующими приспособлениями. Стол 3 смонтирован на неподвижной раме 100. Подъемная платформа стола опирается на винтовой домкрат 101, связанный клиноременной передачей 102 с электродвигателем 103. К платформе стола прикреплены направляющие колонки 104, на одной из которых смонтирован упор 105.
На платформе закреплены два трубчатых рельса 106, на которые контейнер 5 опирается своими роликами 107, имеющими для самоустановки на рельсах клиновидные желоба соответствующего профиля.
С платформой стола серьгами 108 связаны кривоЩипы 109, жестко сидящие на осях 110. На этих же осях жестко закреплены рычаги 111 с подпружиненными упорами 112. На станине смонтированы электрические датчики 113 и 114.
В агрегате предусмотрено устройство 115 для очистки лотков от пыли и крощек обдувом воздухом, представляющее собой проходную камеру с соплами для нагнетания воздуха и патрубком для удаления воздуха, содержащего взвещенные частицы. Устройство 115 подключается к вентиляционной системе.
ми / и 2, после чего при помощи подъемноопускного стола 3 контейнер фиксируется в заданном положении. При прерывистом возвратно-поступательном движении каретки 46 влево толкатели 54, 55, 56 перемещают с позиции санитарной обработки на позицию укладки хлеба.
Заполненный лоток перемещается толкателями каретки на полки подающего элеватора
1, получающего пульсирующее движение с шагом вертикального перемещения цепей, равным расстоянию между полками. Р1мпульс от датчика 18, свидетельствующий о наличии в подающем элеваторе лотков с хлебом,
включает в действие гидропривод устройства 4 для перегрузки лотков. При этом кулиса 23 сдвигает группу лотков с хлебом с полок подающего элеватора на полки контейнера 5. Одновременно все лотки на контейнере сдвигаются вправо на один шаг, а крайняя группа порожних лотков сдвигается с полок контейнера на полки приемного элеватора 2, затем кзлиса 23 возвращается гидроприводом в исходное положение. Так повторяется до тех
пор, пока на контейнере все порожние лотки не будут заменены лотками с хлебом, после чего производится замена контейнера.
Для досылания порожних лотков на полки
приемного элеватора одновременно с рабочим ходом кулисы 23 шатун 55 со смонтированной на нем группой захватов 38 перемещается влево так, что захваты проскакивают в лотки, сдвинутые на полки приемного элеватора 2.
При обратном ходе шатуна 35 в исходное положение захваты 38 сначала оттягивают лотки до образования необходимого зазора, а затем выводятся из лотков. Приемный элеватор 2 поднимает порожние лотки к устройству 7 для горизонтального перемещения лотков.
Фиксацию контейнера на платформе подъемно-опускного стола производят следующим образом. При вращении винтового домкрата
101 платформа стола 3 поднимается до тех иор, пока упор 105 нажимом на датчик 113 не выключит электродвигатель 103, подводя таким образом контейнер 5 до заданного уровня.
Благодаря клиновому профилю желобов у роликов 107 ироисходит самоустановка контейнера на рельсах 106 в поперечном направлении. В продольном направлении центровка контейнера производится рычагами 111, которые при подъеме платформы поворачиваются на осях 110 и упорами 112 фиксируют положение контейнера.
После окончания загрузки контейнера электродвигатель 103 включается в противоположном направлении, платформа стола 3 опускается в исходное положение, рычаги 111 раздвигаются, упор 105 нажимом на датчик 114 останавливает электродвигатель, загруженный контейнер отводится и на его место поступает
Предмет изобретения
1. Хлебоукладочный агрегат, состоящий из подающего и приемного вертикальных цепных полочных элеваторов, расположенного между ними подъемно-опускного стола для установки и фиксации контейнера, устройства для одновременной перегрузки лотков с хлебом с полок подающего элеватора на полки контейнера и порожних лотков с полок контейнера на полки приемного элеватора, устройства для досылания порожних лотков, устройства для горизонтального щагового перемещения лотков от приемного элеватора к подающему элеватору, снабл енного щарнирными попарно закрепленными на осях толкателями, и устройства для укладки хлеба в лотки, размещенного над устройством для щагового перемещения лотков, отличающийся тем, что, с
целью обеспечения компактности, упрощения конструкции и повыщения надежности работы, устройство для горизонтального щагового перемещения лотков расположено между полочными элеваторами.
2.Хлебоукладочный агрегат по п. 1, отличающийся тем, что устройство для горизонтального шагового перемещения лотков расположено между верхними концами полочных
элеваторов.
3.Хлебоукладочный агрегат по п. 1, отличающийся тем, что толкатели устройства для горизонтального шагового перемещения лотков
соединены между собой тягой, причем толкатели одной из пар снабжены упорами, а на их осях смонтированы рычаги, взаимодействующие при холостом ходе устройства с неподвижными копирами и упорами толкателей.
9иг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для комплектования лотков и контейнеров хлебобулочными изделиями | 1977 |
|
SU736928A1 |
| Установка для ассортиментного комплектования контейнеров лотками с хлебобулочными изделиями | 1974 |
|
SU552945A1 |
| Устройство для укладки хлебобулочных изделий в полочные контейнеры | 1987 |
|
SU1423084A1 |
| Устройство для укладки изделий прямоугольной формы | 1986 |
|
SU1364263A1 |
| Линия для подачи хлебобулочных изделий и их укладки на полки многоярусных контейнеров | 1989 |
|
SU1630746A1 |
| Автомат-разгрузчик изделий с сушильной вагонетки | 1982 |
|
SU1033336A1 |
| Установка транспортирования изделий | 1989 |
|
SU1692684A1 |
| Устройство для укладки изделий в тару | 1986 |
|
SU1386515A1 |
| Система для пакетирования грузов на поддоны и их транспортирования | 1985 |
|
SU1375543A1 |
| Устройство для укладки предметов в тару | 1980 |
|
SU912593A1 |

$ 4/ 8
55
cpua 7
112 Ю7 106
jJl-J.,
100
uz.8