{5) УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ МНОГОЯРУСНЫХ СТЕЛЛАЖЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| ШИШУНМИНЕКАПдд | 1972 |
|
SU348462A1 |
| Склад для хранения штучных грузов | 1980 |
|
SU956365A1 |
| Автоматизированный склад | 1972 |
|
SU505600A1 |
| Механизированный склад | 1989 |
|
SU1689231A1 |
| Склад для хранения изделий | 1979 |
|
SU804545A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ЛИСТОВЫХ МАТЕРИАЛСШ | 1965 |
|
SU174130A1 |
| Механизированный склад для штучныхгРузОВ | 1979 |
|
SU850518A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ | 1966 |
|
SU182051A1 |

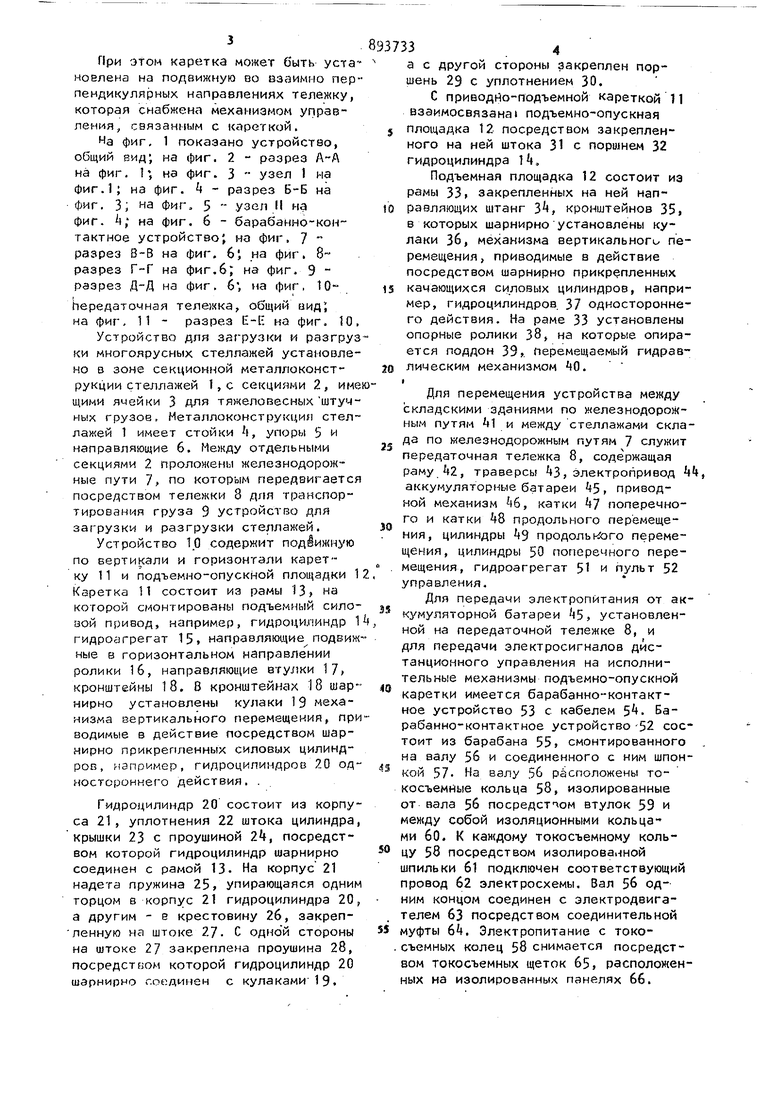
Изобретение относится к складскому оборудованию, в частности к устройствам для звгрузки и разгрузки многоярусных стеллажей.
Известно устройство для загрузки и разгрузки многоярусных стеллажей, содержащее подвижную по вертикали каретку с грузозахватным приспособлением 1 .
Недостатком его является невозможность обслуживания многосекционных стеллажей.
Известно устройство для загрузки и разгрузки многоярусных стеллажей , стойки которых снабжены расположенными с определенным шагом по их высоте упорами, содержащее подвижную по вертикали и горизонта пи каретку с грузозахватным приспособлением и приводным механизмом ее вертикального перемещения, взаимодействующим -с упорами на стойках 2}.
Недостатком этого устройства язляется невозможность обслуживания
стеллажей с неодинаковым по высоте шагом расположения полок в зависимости от высоты груза, уложенного на каждую полку.
Цель изобретения - расширение технологических возможностей устройства за счет обслуживания стел-. лажей с неодинаковым шагом расположения полок по высоте.
Указанная цель достигается тем, что, в устройстве каретка снабжена установленной на ней в вертикальных направляющих подъемно-опускной площадкой, а механизм вертикального перемещения каретки содержит попарно закрепленные на каретке и площадке подпружиненные поворотные кулаки, привод поворота которых выполнен в виде.шарнирно прикрепленных
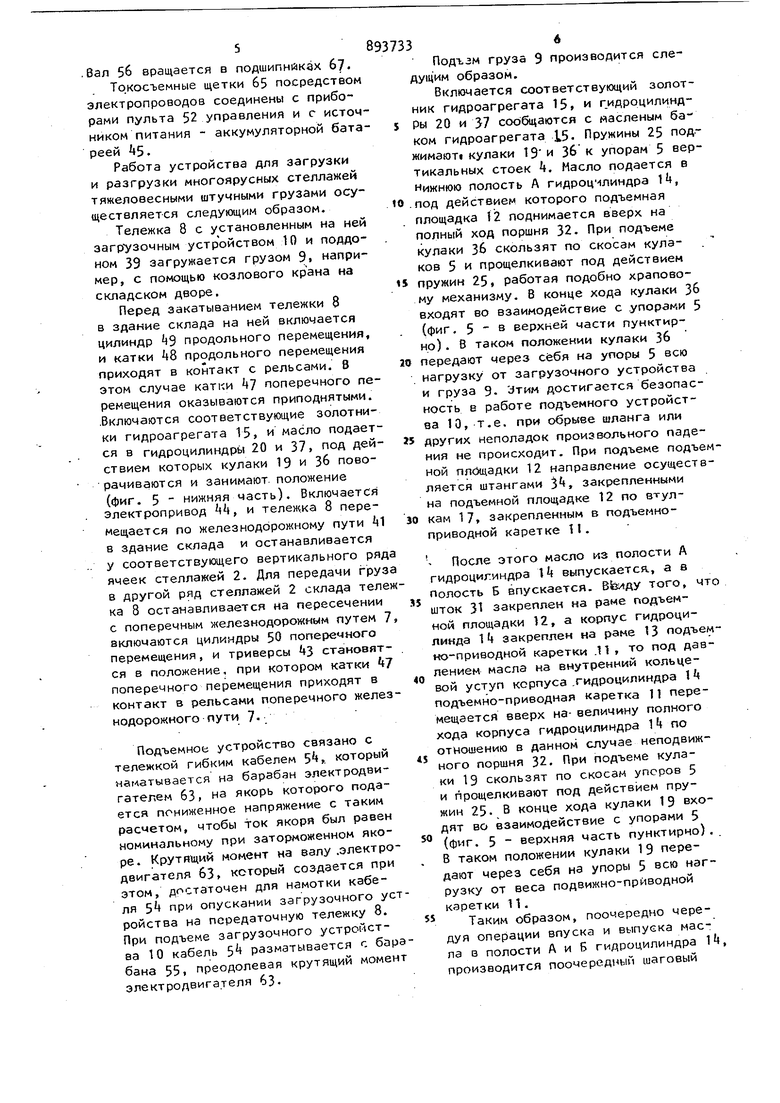
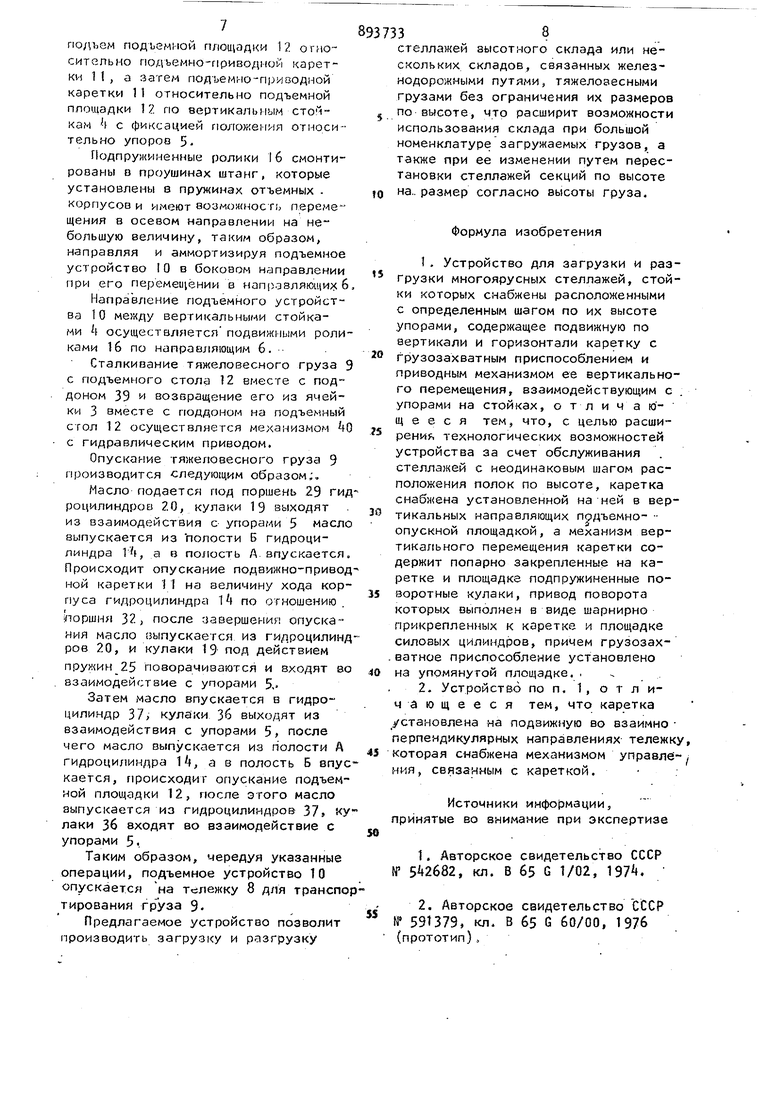
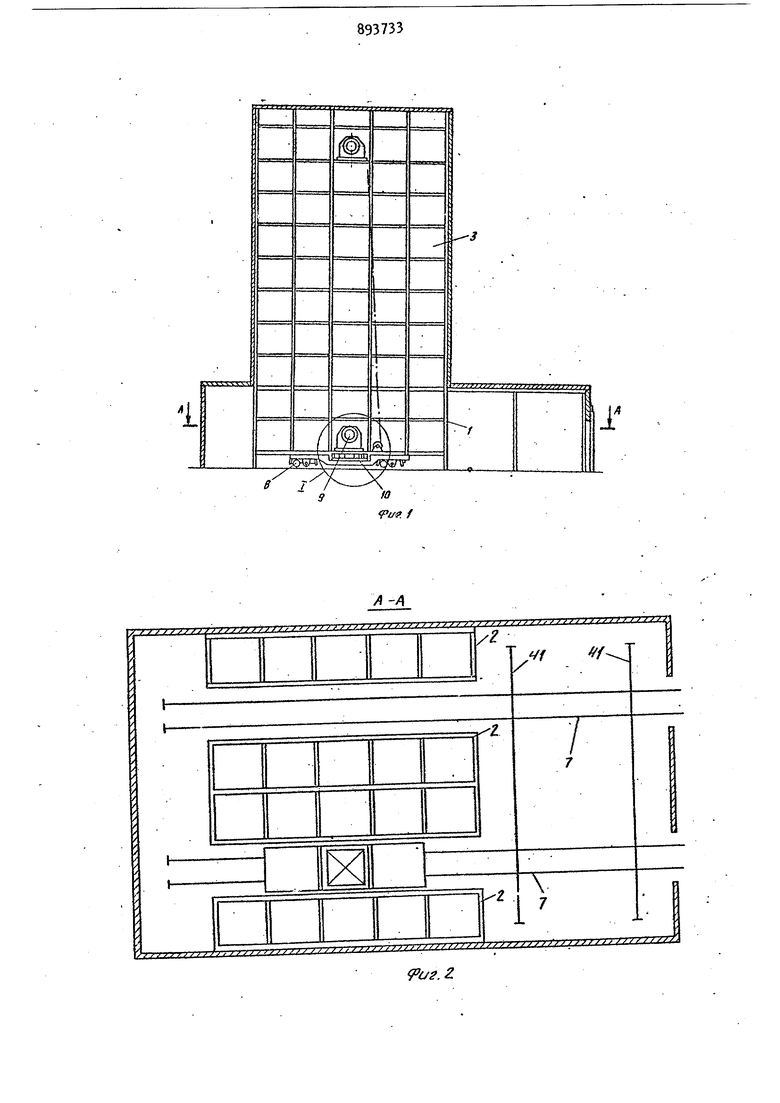
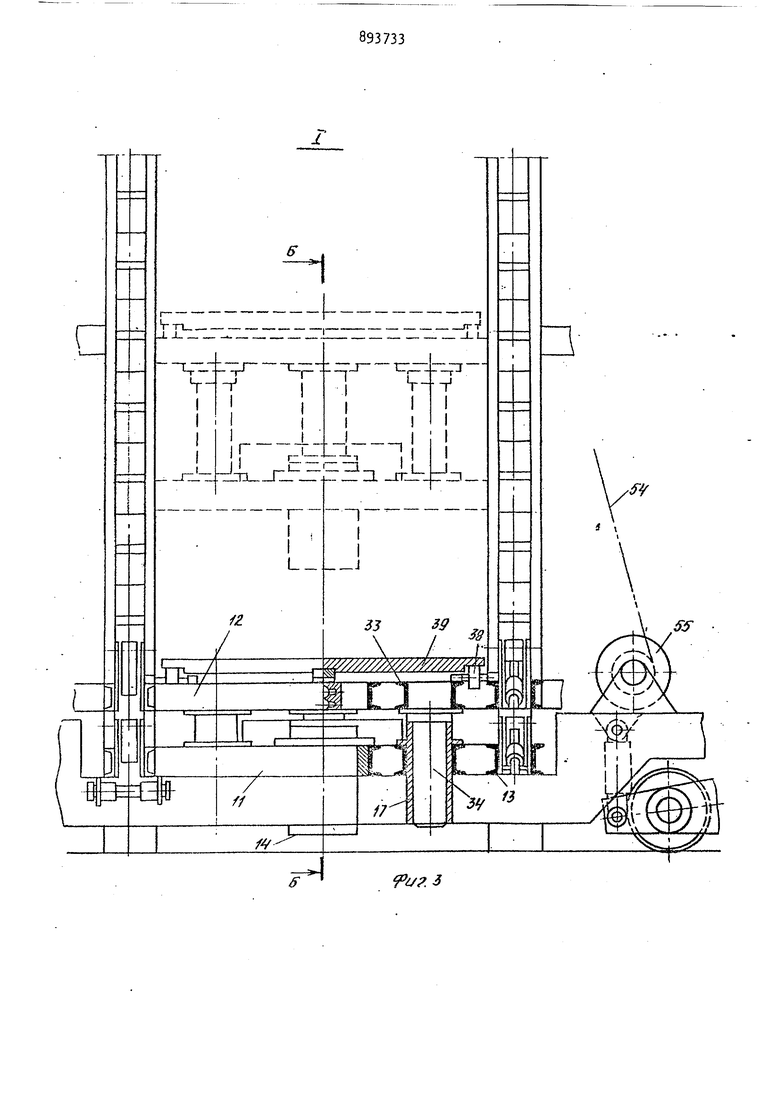
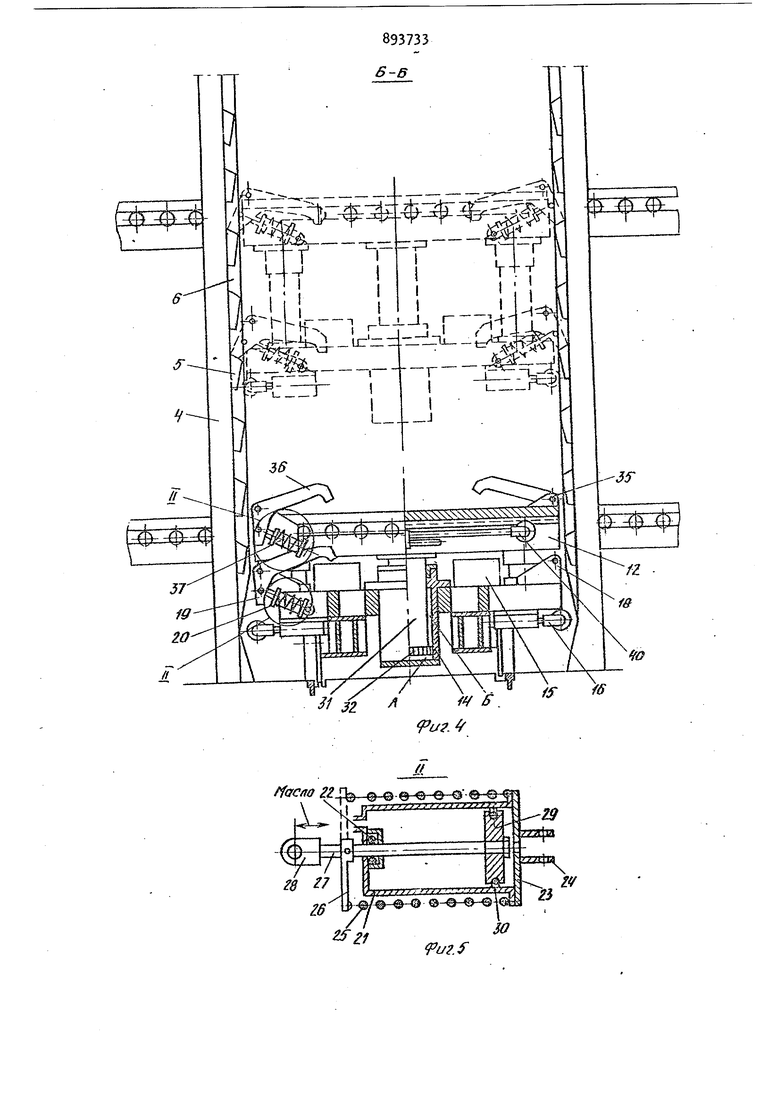
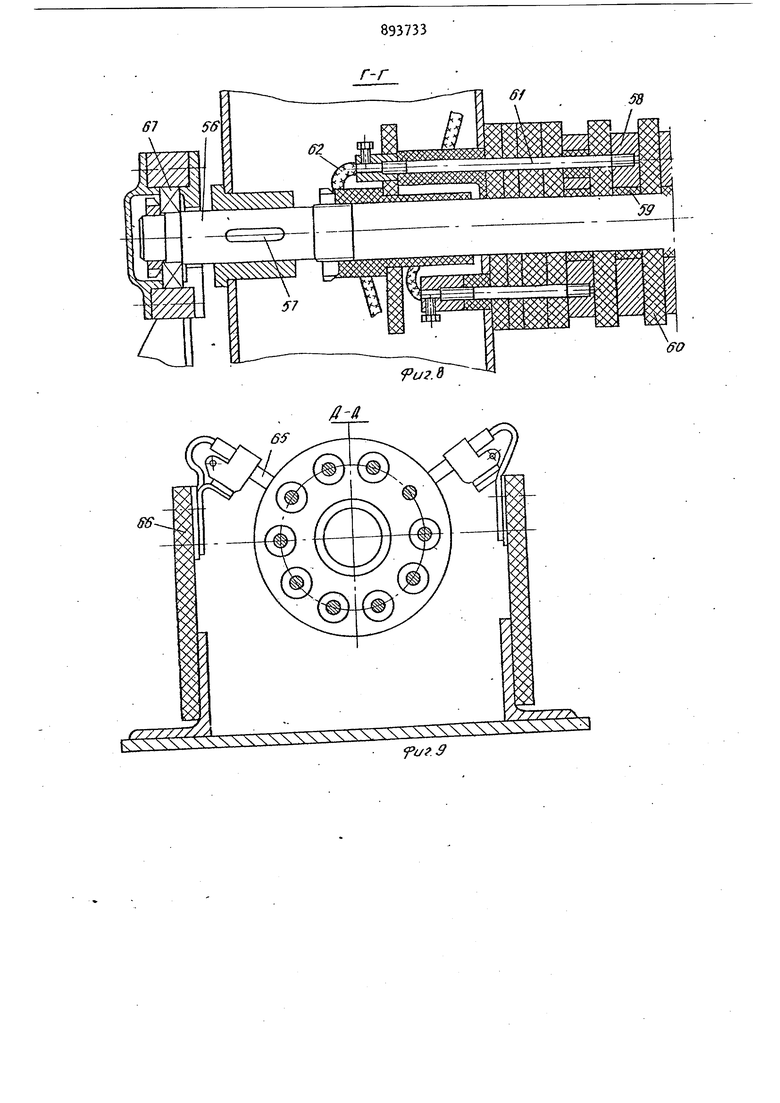
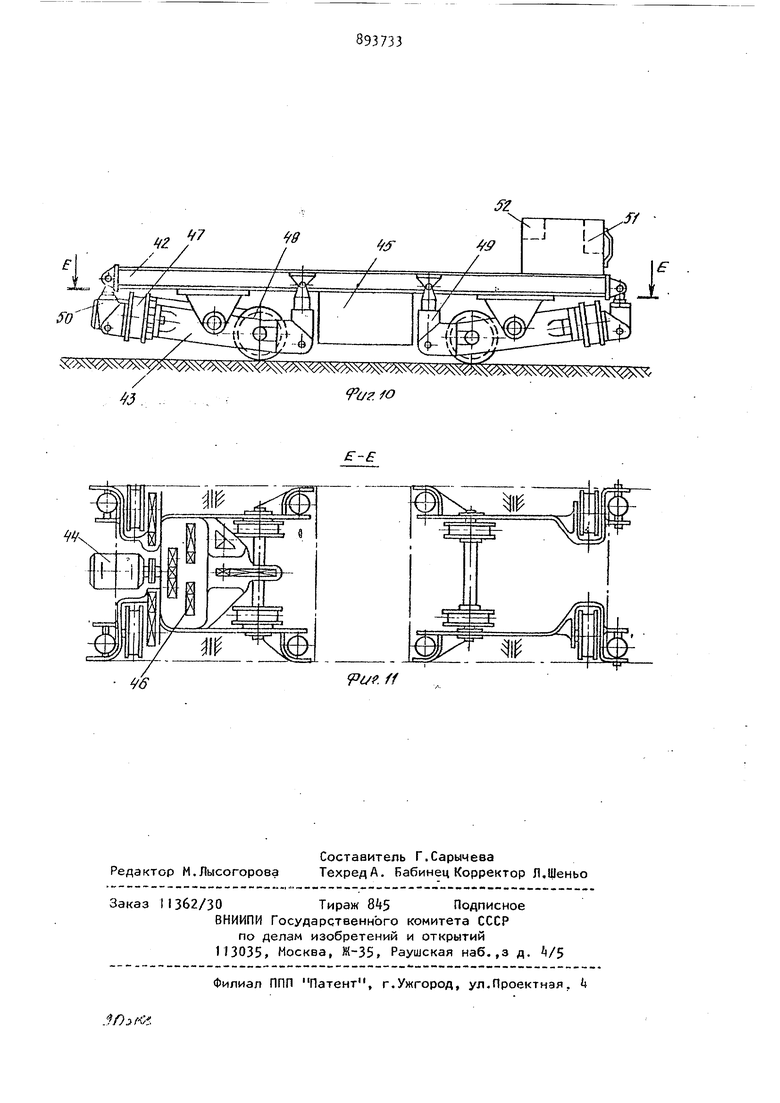
20 к каретке и площадке силовых цилиндров, причем грузозахватное приспособление установлено на упомянутой площадке. При этом каретка может быть уста новлена на подвижную во взаимно пер пендикулярных направлениях тележку, которая снабжена механизмом упрев™ ления., связанным с кареткой. На фиг, 1 показано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 узел 1 на фиг.1; на фиг. - разрез Б-Б на фиг. 3; на фиг, 5 узел 1 н;з фиг. 4; на фиг. 6 - бара6анно-кон тактное устройство; на фиг, 7 разрез В-В на фиг. 6; на фиг, 8разрез Г-Г на фиг.6; на фиг. 9 разрез Д-Д на фиг. 6, на фиг, 10Ьередаточная тележка, общий аид; на фиг, 11 - разрез на фиг. 10 Устройство для загрузки и разгруз ки многоярусных стеллажей установле но в зоне секционной металлоконструкции стеллажей 1, с секциями 2, им щими ямейки 3 для тяжеловесныхштуч ных грузов. Металлоконструкция стел лажей 1 имеет стойки i, упоры 5 и направляющие 6. Между отдельными секциями 2 проложены железнодорожные пути 7, по которым передвигаетс посредством тележки 8 для транспортирования груза 9 устройство для загрузки и разгрузки стеллажей. Устройство 10 содержит по вертикали и горизонтали каретку 11 и подъемно-опускной площадки Каретка 11 состоит из рамы 13 на которой смонтированы подъемный сило вой привод, например, гидроцияиндр гидроагрегат 15 направляющие подвиж ные е горизонтальном направлении ролики 16, направляющие втулки 17 кронштейны 18. В кронштейнах 18 шар нирно установлены кулаки 19 механизма вертикального перемещения, пр водимые в действие посредством шармирно прикрепленных силовых цилиндров, например, гидроцилиндров 20 од ностороннего действия, . Гидроцилиндр 20 состоит из корпу са 21, уплотнения 22 штока цилиндра крышки 23 с проушиной 2k, посредством которой гидроцилиндр шарнирно соединен с рамой 13. На корпус 21 надета пружина 25, упирающаяся одни торцом в корпус 21 гидроцилиндра 20 а другим - е крестовину 2б, закрепленную на штоке 27- С одной стороны на штоке 27 закреплена проушина 28, посредстЕюм которой гидроцилиндр 20 шарнирно соединен с кулаками 19. а с другой стороны закреплен поршень 29 с уплотнением 30. С приводйо-подъемной кареткой 11 взаимосвязана подъемно-опускная площадка 12 посредством закрепленного на ней штока 31 с поршнем 32 гидроцилиндра Ц, Подъемная площадка 12 состоит из рамы 33 закрепленных на ней направляющих штанг 3, кронштейнов 35 в которых шарнирно установлены кулаки 36, механизма вертикальног перемещения, приводимые в действие посредством шарнирно прикрепленных качающихся силовых цилиндров, например, гидроцилиндров 37 одностороннего действия. На раме 33 установлены опорные ролики 38, на которые опирается поддон 39,. Перемещаемый гидравлическим механизмом tO. ) Для перемещения устройства между складскими зданиями по железнодорожным путям il и между стеллажами склада по железнодорожным путям 7 служит передаточная тележка 8, содержащая раму tZ, траверсы 3, электропривод , аккумуляторные батареи kS, приводной механизм 6, катки 47 поперечного и катки kB продольного перемещения, цилиндры 9 продольного перемещения, цилиндры 50 поперечного перемещения, гидроагрегат 51 и пульт 52 управления. Для передачи электропитания от аккумуляторной батареи , установленной на передаточной тележке 8, и для передачи электросигналов дистанционного управления на исполнительные механизмы подъемно-опускной каретки имеется барабанно-контактное устройство 53 с кабелем Барабанно-контактное устройство -52 состоит из барабана 55, смонтированного . на валу 56 и соединенного с ним шпонкой 57- На валу 56 расположены токосъемйые кольца 58, изолированные от вала 5б посредством втулок 53 и между собой изоляционными кольцами 60. К каждому токосъемному кольцу 58 посредством изолированной шпильки 61 подключен соответствующий провод 62 электросхемы. Вал 56 одним концом соединен с электродвигателем 63 посредством соединительной муфты 6k. Электропитание с токосъемных колец 58 снимается посредством токосъемных щеток 65, расположенных на изолированных панелях 66. 5 .Вал 5б вращается в подшипниках 67. . Токосъемные щетки б5 посредством электропроводов соединены с приборами пульта 52 управления и с источником питания - аккумуляторной батареей tS. Работа устройства для загрузки и разгрузки многоярусных стеллажей тяжеловесными штучными грузами осуществляется следующим образом. Тележка 8 с установленным на ней загрузочным устройством 10 и поддоном 39 загружается грузом 9. например, с помощью козлового крана на складском дворе. Перед закатыванием тележки 8 в здание склада на ней включается цилиндр Э продольного перемещения, и катки 8 продольного перемещения приходят в контакт с рельсами. В этом случае катки 7 поперечного перемещения оказываются приподнятыми. Включаются соответствующие золотники гидроагрегата 15, и масло подается в гидроцилиндры 20 и 37, под действием которых кулаки 13 и 36 поворачиваются и занимают положение (фиг. 5 нижняя часть). Включается Электропривод i, и тележка 8 перемещается по железнодорожному пути k в здание склада и останавливается у соответствующего вертикального ряд ячеек стеллажей 2. Для передачи груз в другой ряд стеллажей 2 склада теле ка 8 оста-навливается на пересечении с поперечным железнодорожным путем 7 включаются цилиндры 50 поперечного перемещения, и триверсы становятся в положение, при котором катки 7 поперечного перемещения приходят в контакт в рельсами поперечного желез нодорожного пути 7Подъемное устройство связано с тележкой гибким кабелем 5. который наматывается на барабан электродвигателем 63. на якорь которого подается пониженное напряжение с таким расчетом, чтобы ток якоря был равен номинальному при заторможенном якоре. Крутящий момент на еалу .электро двигателя 63 который создается при этом, достаточен для намотки кабеля 5 при опускании загрузочного уст ройства на передаточную тележку 8. При подъеме загрузочного устройства 10 кабель 5 разматывается с бар бана 55. преодолевая крутящий момен электродвигателя 63. 3 Подъзм груза Э производится слеДУ1ЦИМ образом. Включается соответствующий золотник гидроагрегата 15, и г.идроцилиндРы 20 и 37 соогбщаются с масленым баком гидроагрегата 1,5. Пружины 25 под.жимают кулаки 19 и 36 к упорам 5 вертикальных стоек k. Масло подается в Нижнюю полость А гидроцчлиндра }k, под действием которого подъемная площадка 12 поднимается вверх на полный ход поршня 32. При подъеме кулаки Зб скользят по скосам кулаков 5 и прощелкивают под действием пружин 25, работая подобно храповому механизму. 8 конце хода кулаки 36 входят во взаимодействие с упорами 5 (фиг. 5 в верхней части пунктирно) . 8 таком положении кулаки 36 передают через себя на упоры 5 всю нагрузку от загрузочного устройства и груза 9- Утим достигается безопасность в работе подъемного устройства 10, т.е. при обрыве шланга или других неполадок произвольного падения не происходит. При подъеме подъемной плсУщадки 12 направление осуществляется штангами 3, закрепленными на подъемной площадке 12 по втулкам 17 закрепленным в подъемноприводной каретке И. После этого масло из полости А гидроцигиндрз 1Ц выпускается, а в Полость Б впускается. ВЫду того, что шток 31 закреплен на раме подъемной площадки 12, а корпус гидроцилинда k закреплен на раме 13 подъемно-приводной каретки .11 . то под давлением масла на внутренний кольцевой уступ корпуса .гидроцилиндра 1t подъемно-приводная каретка 11 перемещается вверх на- величину полного хода корпуса гидроцилиндра h по отношению в данном случае неподвижного поршня 32. При подъеме кулаки 19 скользят по скосам упоров 5 и прощелкивают под действием пружин 25. В конце хода кулаки 19 входят во взаимодействие с упорами 5 (фиг. 5 - верхняя часть пунктирно).. В таком положении кулаки 1 9 передают через себя на упоры 5 всю нагрузку от веса подвижно-приводной каретки 11. Таким образом, поочередно чередуя операции впуска и выпуска масла в полости А и Б гидроцилиндра Tl, производится поочередный шаговый гюдьем подъемной площадки 12 огмосительмо подъемно-приводной каретки 1 I , а затем подъемно-приоод -1ой каретки 11 относительно подъемной площадки 12 по вертикальным стопкам ( с фиксацией положения относительно упоров 5Подпружиненные ролики 16 смонтированы в проушинах штанг, которые установлены в пружинах отъемных . корпусов и имеют нозмоиносгь переме щения в осевом направлении на не большую величину, таким образом, направляя и аммортизируя подъемное устройство 10 в боковом направлении при его перемеи1ёнии в нап|).:)8ЛЯ1Си(их 6 Направление подъемного устройства 10 вертикальными стойками ( осуществляется подвижными роли ками 16 по направляющим 6. Сталкивание тяжеловесного груза с подъемного стола 12 вместе с под™ доном 39 и возвращение его из ячейки 3 вместе с поддоном на подъемный стол 12 осуществляется механизмом с гидравлическим приводом. Опускание тяжеловесного груза 9 производится следующим . Масло подается под поршень 29 ги роцилиндров .0, кулаки 19 выходят из взаимодействия с упорами 5 масл выпускается из полости Б гидроцилиндра Vi, а в полость А впускается Происходит опускание подвижно-приво ной каретки 1I на величину хода кор пуса гидроцилиндра It по отношению, лоршня 32, после ;)а зершения опускания масло выпускается из гидроцилин ров 20, и кулаки 19 под действием пружин 25 поворачиваются и входят в взаимодействие с упорами S,Затем масло впускается в гидроцилиндр 37, кулаки 36 выходят из взаимодействия с упорами 5, после чего масло выпускается из полости А гидроцилиндра Il, а в полость Б впу кается, происходит опускание подъем ной площадки 12, после этого масло выпускается из гидроцилиндров 37 К лаки 36 входят во взаимодействие с упорами 5. Таким образом, чередуя указанные операции, подъемное устройство 10 опускается на тележку 8 для транспо тирования груза 9. Предлагаемое устройство позволит производить загрузку и разгрузку стеллажей высотного склада или нескольких складов, связанных железнодорожными путями, тяжеловесными грузами без ограничения их размеров по высоте, что расширит возможности использования склада при большой номенклатуре загружаемых грузов, а также при ее изменении путем перестановки стеллажей секций по высоте на., размер согласно высоты груза. Формула изобретения 1.Устройство для загрузки и разгрузки многоярусных стеллажей, стойки которых снабжены расположенными с определенным шагом по их высоте упорами, содержащее подвижную по вертикали и горизонтали каретку с грузозахватным приспособлением и приводным механизмом ее вертикального перемещения, взаимодействующим с . упорами на стойках, отличающ е е с я тем, что, с целью расширения, технологических возможностей устройства за счет обслуживания стеллажей с неодинаковым шагом расположения полок по высоте, каретка снабжена установленной на ней в вертикальных направляющих подъемно- опускной площадкой, а механизм вертикального перемещения каретки содержит попарно закрепленные на каретке и площадке подпружиненные поворотные кулаки, привод поворота которых выполнен в виде шарнирно прикрепленных к каретке и площадке силовых цилиндров, причем грузозахватное приспособление установлено на упомянутой площадке., 2.Устройство по п. 1, о т л ичающееся тем, что каретка становлена на подвижную во взаимно перпендикулярных направлениях тележку, которая снабжена механизмом управлёния, связанным с кареткой. Источники информации, принятые во внимание при экспертизе 1.Ааторское свидетельство СССР № , кл. В 65 G 1/02, 197, 2.Авторское свидетельство СССР № 591379, кл. В 65 G 60/00, 1976 (прототип),
a.2
1 „ ..
l-
.и:щй
Г.--. г
.i -ixr: 5 xV 74 // J2
©OQ О ©
V4-y
1 ,
т
I4--J
/ Ц f йУ лfgf f a.
/ /7
г1
so
U2.
flU
.8
fa.3
у
J
.fO
Ж51Ж
