д pj
м
Изобретение относится к подъемно- tpaHcnopTHOMy машиностроению и касается вспомогательных устройств подъ- «жных кранов для перемещения преимущественно пакетированного сортового ироката.
Цель изобретения - упрощение конструкции.
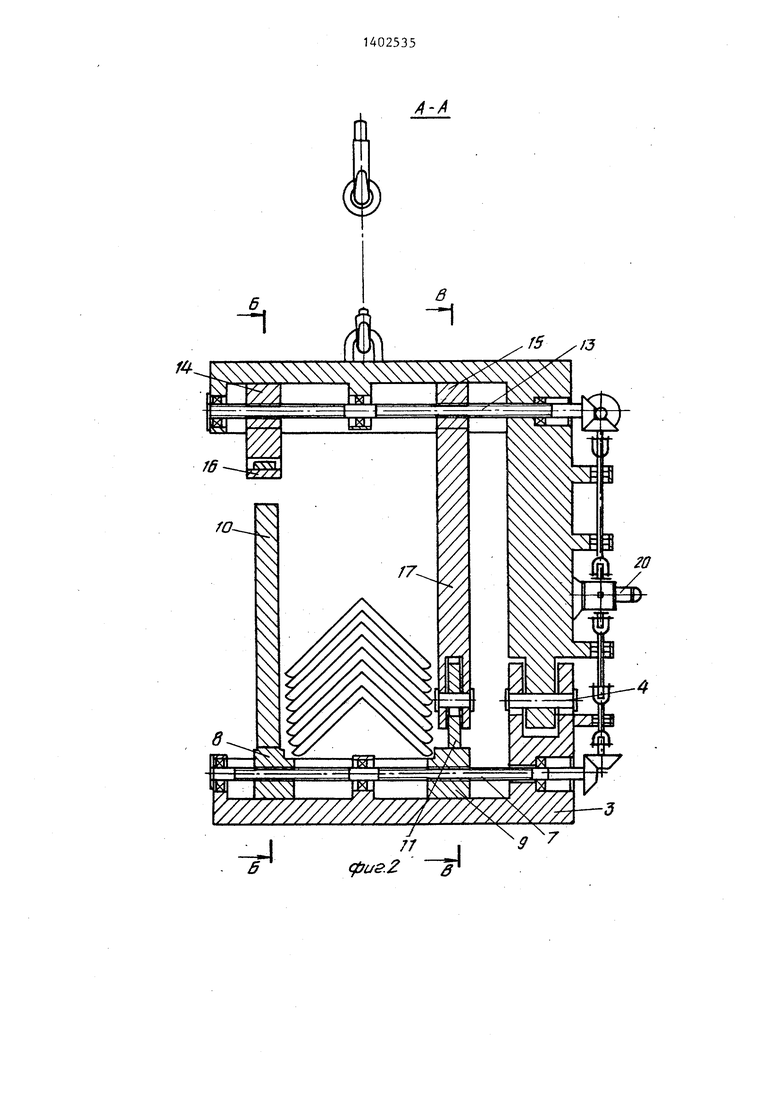
На фиг.1 представлено устройство, сЬбщий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б--Бнафиг.2; на фиг.4 - разрез В-В на фиг,2. ; Вилочный захват состоит из верти- альный,стоек 1, которые связаны межДу собой траверсой 2. Каждая стойка
1шарнирно соединена с соответствую- фей вилой 3 через ось 4, расположен
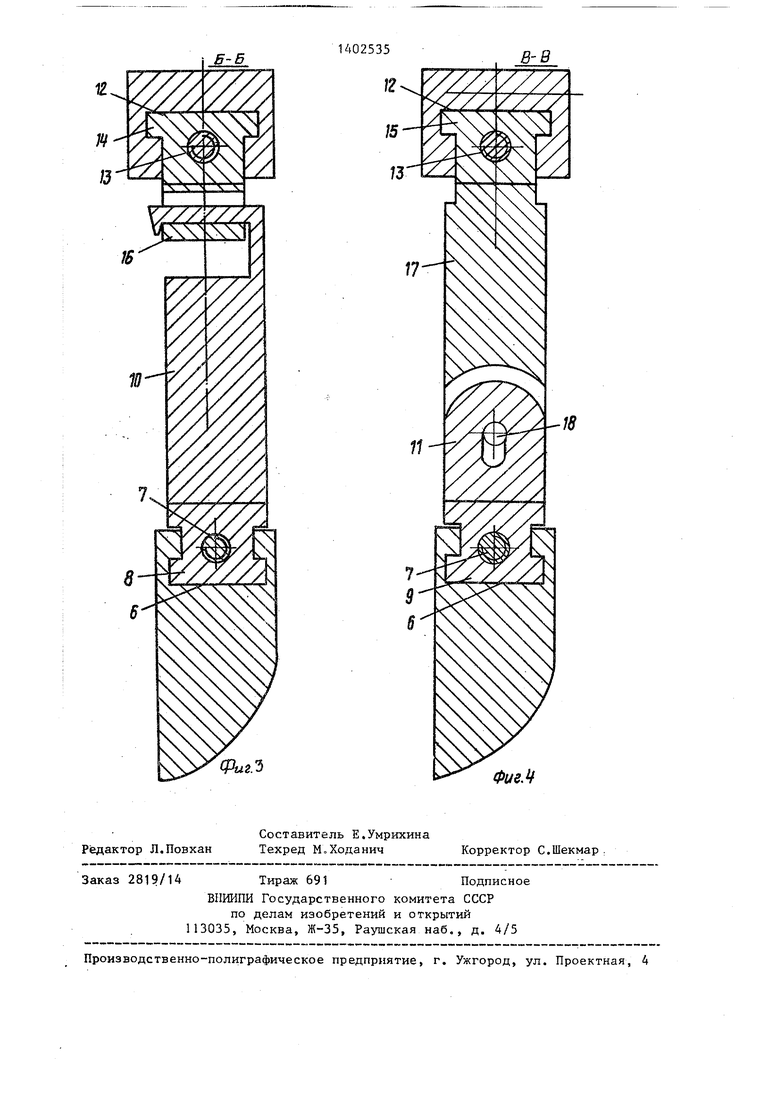
ую перпендикулярно плоскости стоек, тверстие 5 для оси в виде 3 выпол- ено овальной формы. Нижняя часть :филы 3 выполнена по профилю который Дозволяет вилке при опускании эахва- i a в нижнее положение проворачиваться на 90 :вокруг оси 4. В виле 3 выпол- ь|ен паз 6, в котором размещен ходовой инт 7 с ходовыми гайками 8 и 9. К 1|айке 8 жестко крепится ограничительный рычаг 10, а к гайке 9 рычаг 11. Напротив паза 6 в траверсе 2 выполнен 12 с ходовым винтом 13 и ходовыми райками 14 и 15. Hai гайке 14 размещен 4амок 16, а к гайке 15 жестко крепит 4я рычаг 17, соединенный осью 18 с гычагом 11, при этом ось 18 размещена соосно с осью 4. На захвате имеется кинематическая система 19 с приводом
2О для одновременного вращения ходо- 1ЫХ винтов 7 и 13. На траверсе имеютс гроушины 21 для подвешивания к крану.
Вилочный захват работает следующим ёбразом.
Перед началом работы вилочный зах- йат настраивают на требуемый размер изделий. Для этого с помощью привода 20 системы 19 ходовые винты 7 и 13 г1риводятся во вращение. Рычаги 10 и 17 перемещаются один навстречу другому вместе с,-ходовыми гайками 8,9, 14 и 15.
Через проушины 21 захват крепят к крану и подают „к бтопе прокатаэ размещенной на стойках. При этом рычаг 10 находится в вертикальном положении И своим концом крепится в замке 16. При этом за счет отверстия 5 в момент касания вилой 3 пола стойки 1 с тра
версой 2 продолжают движение вниз, конец рычага 10 выходит из зацепления с замком 16, и при дальнейшем опускании захвата вилы 3 проворачиваются вокруг оси 4 по своей профильной поверхности.
Рычаг 10 также занимает горизонтальное положение. Вилы 3 проводят под стопу. Затем захват краном поднимают...Вилы 3 под действием собственного веса возвращаются в начальное положение и в момент касания стопы конец рычага 10 входит в замок 16. Стопа фиксируется и в таком состоянии передается на следующую позицию.
Таким Ьбразом, в предложенной конструкции захвата рычаг откидывается таким образом, что возможно размещение стоп проката на близком расстоянии друг от друга. Это позволяет эко- номить производственные площади.
Формула изобретения
1.Вилочный захват для грузов, Уочоженных на опоры,преимущественно для перегрузки сортового проката, содержащий стойки, в зоне верхних концов связанные между собой траверсой, вилы, связанные с нижними концами стоек и поворотные в плоскости, перпендикулярной продольным осям вил, ограничительные рычаги-, соединенные каждый с соответствующей .вилой, отличающийся тем, что,
с целью упрощения конструкции, каждая вила соединена с соответствующей стойкой с возможностью поворота в плоскости, перпендикулярной своей продольной оси, и выполнена с профильной нижней поверхностью для взаимодействия с основанием, на которое установлены опоры для груза, а каждый ограничительный рычаг соединен с соответствующей вилой с возможностью одновременного поворота с ней, при этом вила выполнена массой, большей массы ограничительного рычага.
2.Йилочный захват по п.1, отличающийся тем, что вилы закреплены на стойках посредством осей, размещенных в продольных пазах, выполненных в зоне нижних концов стоек, а свободньш конец рычага и траверса снабжены элементами фиксации рычага в рабочем положении.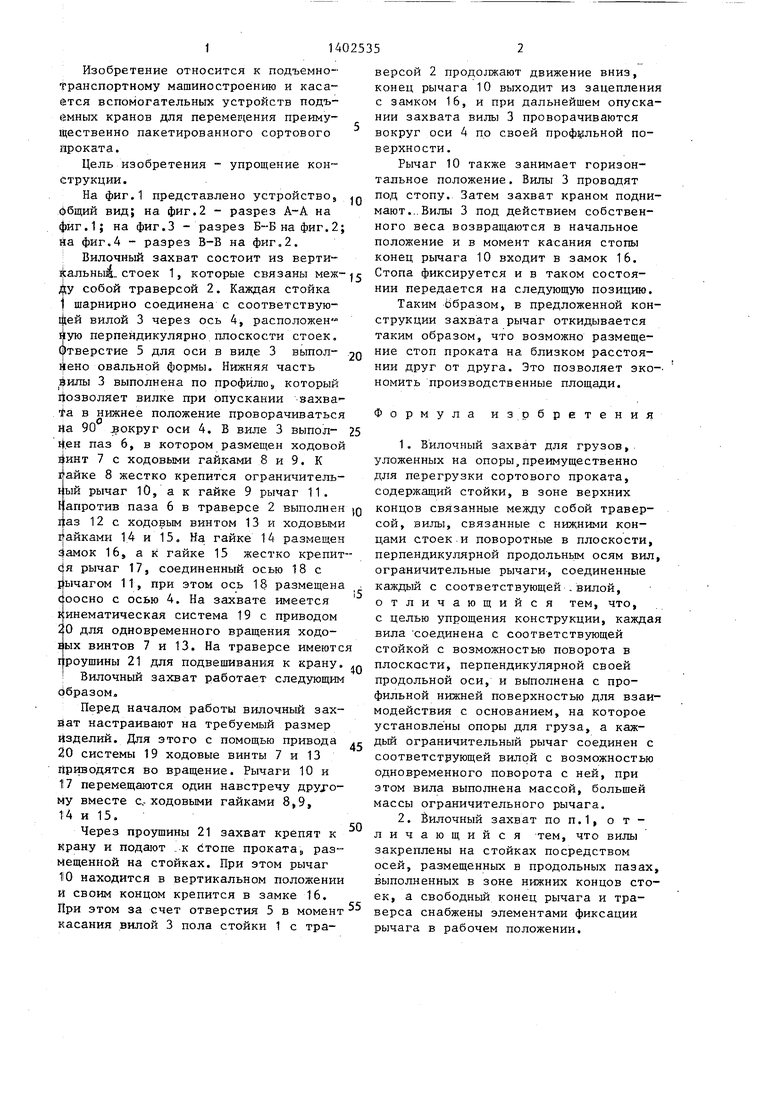
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Устройство для механизации доставки и возведения металлической арочной крепи | 1988 |
|
SU1610031A1 |
| Захват-манипулятор подъемного крана для перемещения пакетированного груза | 1977 |
|
SU683979A1 |
| Вилочный захват | 1984 |
|
SU1261883A2 |
| Вилочный захват | 1979 |
|
SU867841A1 |
| Устройство для переноса опор линий электропередач | 1990 |
|
SU1756185A1 |
| Крановый вилочный захват | 1986 |
|
SU1355587A1 |
| Вилочный захват | 1981 |
|
SU962177A2 |
| Комплекс для штамповки деталей из полосового и ленточного материала | 1983 |
|
SU1199379A1 |
| Вилочный захват | 1982 |
|
SU1041483A2 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к воспомогательным устройствам подъемных кранов для перемещения пакетированного сортового проката. Цель изобретения - упрощение конструкции. Захват содержит вертикальные стойки 1, связанные между собой траверсой 2, вильц шарнирно соединенные одним концом с каждой стойкой через ось 4, а другим - с откидным ограничительным рычагом, закрепленным на виле в вертикальном положен1ш и поворотньм в вертикальной плоскости, перпендикулярной продольной оси вил. Вилы выполнены с профильной нижней поверхностью, которая при опускании захвата взаимодействует с опорной поверхностью и, обкатываясь по ней, откидывает рычаг нз вертикального в горизонтальное положение. Для возврата рычага в исходное вертикальное положение вилы выполнены тяжелее рычага и выполняют функцию противовеса. 1 з.п. ф-лы, 4 ил. S
Г5 //j
Б-Б
1402535
Сриг.Ъ
В В
Фие.
| СПОСОБ ОЧИСТКИ НЕФТЕСОДЕРЖАЩИХ СТОЧНЫХ ВОД | 2008 |
|
RU2362742C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
