67.
/,5/7
J2 2 V
/4
//
4 f
18 f 7
Фи8.1
13
Изобретение относится к общему машиностроению и может быть нспользовано при автоматизации нроизводственных процессов, связанных с шаговым неремещением исполнительных органов в горизонтальной или вертикальной плоскостях на относительно большие расстояния.
Цель изобретения - новышенне надежности путем увеличения несущей снособно- сти механизма и упрон1ения конструкции, исключения его заклиниваний.
На фиг. 1 изображен предлагаемый реверсивный механизм, общий вид; на фиг. 2 - то же, вид сверху (при различных положениях его звеньев).
Реверсивный механизм содержит основа- пне 1 с двумя рядаму противоположно на- нравленных зубьев 2 и 3, взаимодействующих с собачками 4, установленными на осях 5 ведомого звена 6, выполненного в виде кареток 7 и 8. Собачки 4 подпружинены к основанию в сторону перемещения каре- ток 7 и 8. Каретки 7 и 8 кинематически шатунами 9 связаны с приводом (не показан) их возвратно-поступательного перемещения. Привод установлен на каретке 10, на которой имеется ось 11 для крепле- ПИЯ одной из собачек 4 в случае выполнения механизма с прерывистым перемещением ведомого звена 6. При это.м один из шатунов 9 отсоединяется от привода. Основание 1 имеет по две цилиндрические выемки 12 и 13 на концах каждого ряда зубь- ев 2 и 3. Каретки 7 и 8 установлены в направляющих 14 основания 1. Шатуны 9 соединены с кривошипом 15, а каретки 7, 8 и 10 имеют опорные колеса 16, на которых они неремещаются в направляющих 14. Для предохранения механизма от поломок при перегрузках направляющие 14 установлены : на пальцах 17 и подпружинены к основанию ; I пружина.ми 18.
0
5 0 5 о
5
Реверсивный механизм работает следующим образом.
При вращении кривошипа 15 от привода шатуна 9 попеременно перемещают каретки 7 и 8 в направляющих 14. Подпружиненные собачки 4 скользят по зубья.м 2 основания 1 и сцепляются с зубьями 3, и привод с кареткой 10 движется вправо. В конце хода каретки 10 вправо собачки, попадая в цилиндрические выемки 12 и 13, .выпрямляются и при дальнейшем вращении привода заходят в зацепление с зубьями 2, скользя по зубьям 3, и обеспечивают ход каретки 10 влево до цилиндрических выемок 12 и 13, находящихся на лево.м конце основания 1. При перегрузке механизма направляющие 14 вместе с каретками 7, 8 и 10 поднимаются на пальцах 17, собачки 4 разворачиваются, и каретка 10 начинает перемещаться в обратном направлении.
Формула изобретения
1.Реверсивный механиз.м, содержащий основание с направляющими, ведущее звено, кинематически связанное с ним ведомое звено с подпружиненными к основанию собачками, установленное с возможностью перемещения в направляющих основания, и привод ведущего звена, отличающийся тем, что, с целью повышения надежности, на основании выполнены два парал„аельных ряда противоположно направленных зубьев, предназначенных для взаимодействия с собачками, и расположенные по концам рядов цилиндрические выемки для изменения направления наклона собачек.
2.Механизм по п. 1, отличающийся тем, что направляющие установлены с возможностью перемещения относительно основания и подпружинены к нему.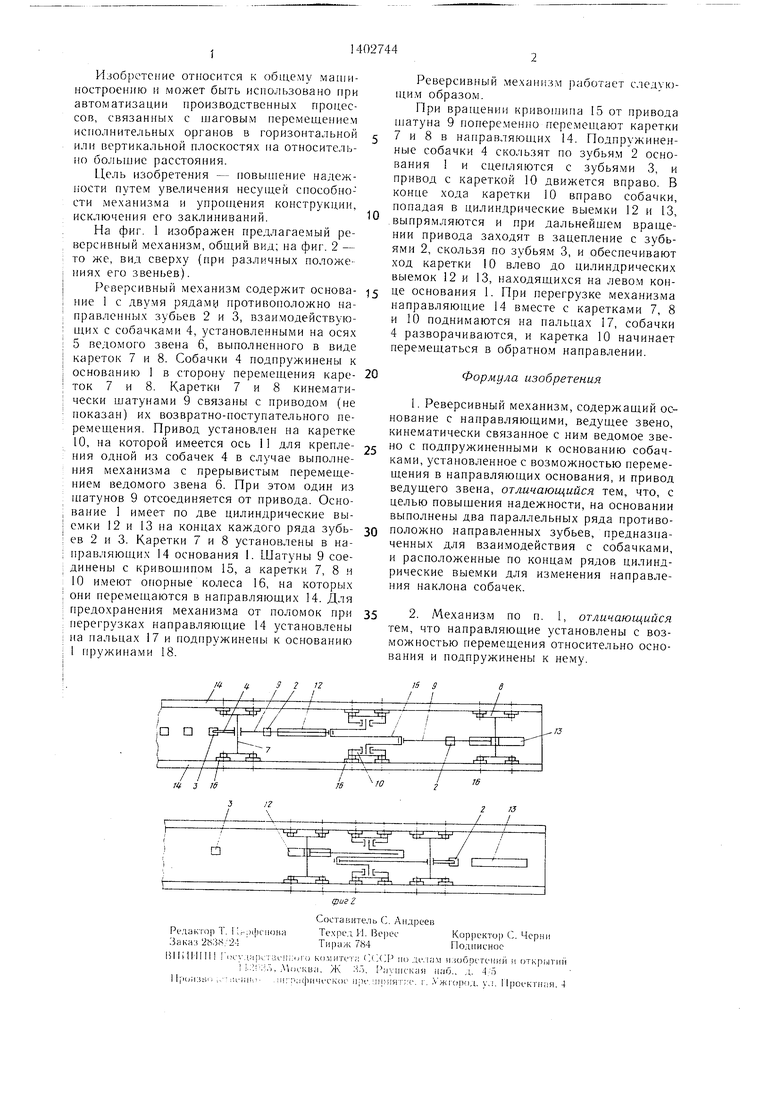
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полирования деталей | 1986 |
|
SU1433771A1 |
| Реверсивный механизм | 1982 |
|
SU1203278A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Накопитель | 1984 |
|
SU1206053A1 |
| МУФТА-ТОРМОЗ | 1987 |
|
RU2013675C1 |
| Рычажно-храповой механизм с кривошипно-ползунным приводом | 1987 |
|
SU1421928A1 |
| Коробка передач | 1986 |
|
SU1308793A2 |
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |
| Импульсный привод горного комбайна | 1981 |
|
SU1063997A1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
Изобретение относится к общему машиностроению и может быть использовано при автоматизации производственных процессов, связанных с шаговым перемещением исполнительных органов в горизонтальной или вертикальной плоскости на относительно большие расстояния. Цель изобретения - повышение надежности путем увеличения несущей способности механизма и упрощения конструкции, исключения его заклиниваний. При вращении кривошипа от привода шатуны 9 попеременно перемещают каретки 7 и 8 в направляющих 14. Подпружиненные собачки 4 скользят по зубьям 2 основания 1 и сцепляются с зубьями 3, и привод с кареткой 10 движется вправо. В конце хода каретки 10 вправо собачки 4 попадая в цилиндрические выемки 12 и 13, выпрямляются, при дальнейшем вращении привода заходят в зацепление с зубьями 2, и скользя по зубьям 3, обеспечивают ход каретки 10 влево до цилиндрических выемок 12 и 13, находящихся на левом конце основания 1. При перегрузке механизма направляющие 14 вместе с каретками 7, 8 и 10 поднимаются на пальцах 17, собачки 4 разворачиваются и каретка 10 начинает перемещаться в обратном направлении. 1 з.п. ф-лы, 2 ил. с: (Л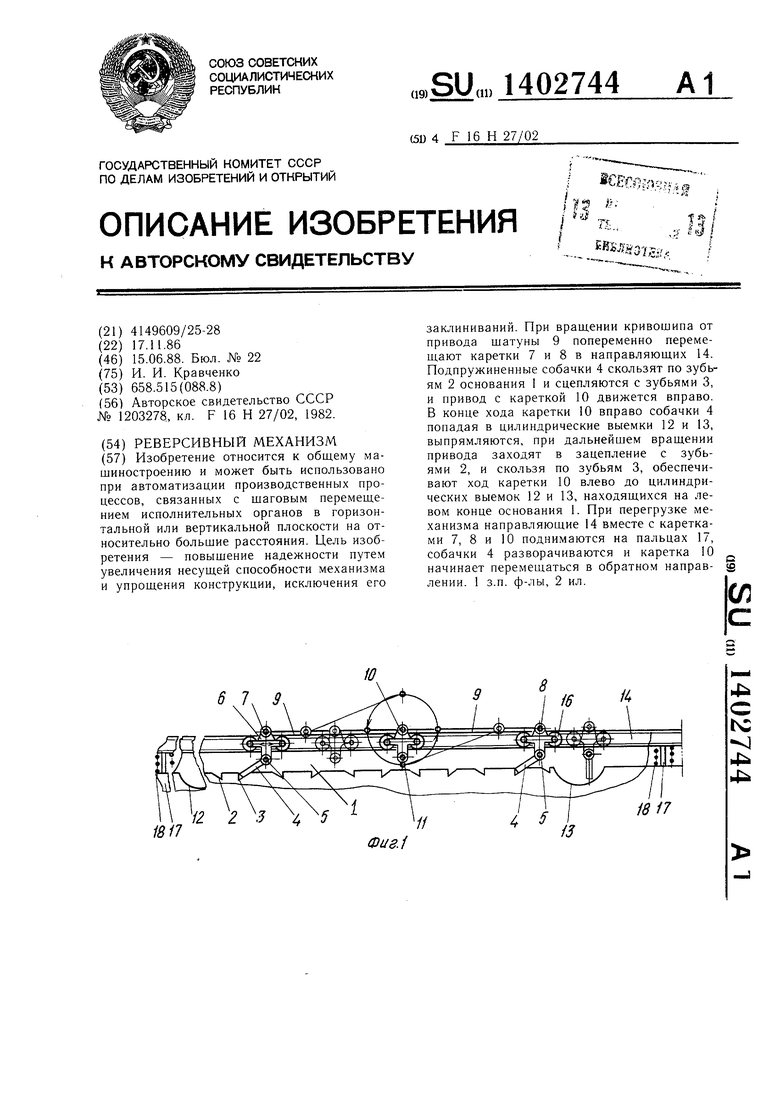
| Реверсивный механизм | 1982 |
|
SU1203278A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
