Изобретение относится к машиностроению и может быть использовано в транспортах, конвейерах, делительных устройствах и т..д.
Цель изобретения - расширение кинематических возможностей путем обеспечения различного угла поворота ведомого звена при прямом и обратном ходе привода.
На чертеже изображен рьгчажно-хра- повой механизм с кривошипно-ползунны приводом, общий вид.
Рычажно-храповой механизм с.кри- вошипно- ползунным приводом содержит корпус 1, установленное в корпусе 1 на оси 2 храповое колесо 3, два кривошипа 4 и 5, выполненные в виде дисков, с собачками 6 и 7. Собачки 6 и 7 соединены пальцами 8 и 9 с шатунами 10 и 11 разной длины, которые в свою очередь связаны с помощью пальца 12 с поршнем 13, совершающим возвратно-поступательные перемещения В кривошипе 4 выполнен паз 14, в ко- торый установлен палец 8,
Рычажно-храповой механизм с кривошипно-ползунным Приводом работает следующим образом.
Поршень 13 перемещается влево, при этом шатун 10 перемещает палец 8 в пазу 14 кривошипа 4 до конца паза, а затем уже собачка 6 упирается в зуб храпового колеса 3 и поворачивает его на угол rf по часовой стрелке При этом собачка 7, установленная на (Кривошипе 5, проскальзывает по. зубья
5
,
5
0
0
5
Ьсрапового колеса 3, т.е. совершает холостой ход на угол ft , При перемещении поршня 13 вправо с соответствующим зубом храпового колеса 3 зацепляется уже собачка 7, установленная на кривошипе 5 и поворачивает храповое колесо на угол /i , а собачка 6 проскальзывает по зубьям храпового колеса .3, т.е. совершает холостой ход.
Таким образом, за цикл храповое колесо поворачивается на угол ( о + )
Вьтолнение шатунов 10 и 11 разной длины и размещение одной из собачек 6 или 7 в пазу 14 кривошипа 4 или 5 обеспечивает любое сочетание величин углов (/ и (S..
Формула изобретения
Рычажно-храповой механизм с кривошипно-ползунным приводом, содержащий храповое колесо, установленные соос- но ему два кривошипа с размещенными на них собачками, два шатуна, соединенные шарнирно с помощью пальцев с соответствующими кривошипами, и привод возвратно-поступательного перемещения, соединенный шарнирно с шату- нами, отличающийся тем, что, с целью расширения кинематических возможностей, шатуны выполнены разной длины, а в одном из кривошипов выполнен паз, в котором установлен палец, соединяющий его с шатуном.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для привода продольного транспортера кормораздатчика | 1988 |
|
SU1576083A1 |
| Пульсирующий конвейер с регулируемым шагом | 1984 |
|
SU1284906A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Устройство для привода продольных транспортеров кормораздатчиков | 1986 |
|
SU1327857A1 |
| Противоточный горизонтальный шнековый экстрактор | 1990 |
|
SU1819648A1 |
| Механизм привода питателя кормов | 1987 |
|
SU1475563A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| Кулачково-кулисный механизм с остановками | 1988 |
|
SU1523799A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1421923A1 |
| Привод шпинделя | 1979 |
|
SU770676A1 |
Изобретение относится к машиностроению и может быть использовано в транспортерах, конаейерах, делитель- , ных устройствах и т.д. Цель изобретения - расширение кинематических возможностей механизма путем обеспечения различного угла поворота ведомого звена при прямом и обратном ходе привода. Цель изобретения достигается выполнением шатунов 10 и 11 разной длины и размещением одной из собачек 6 или 7 в пазу 14 кривошипа 4 или 5. 1 ил. (Л ГС со 1C с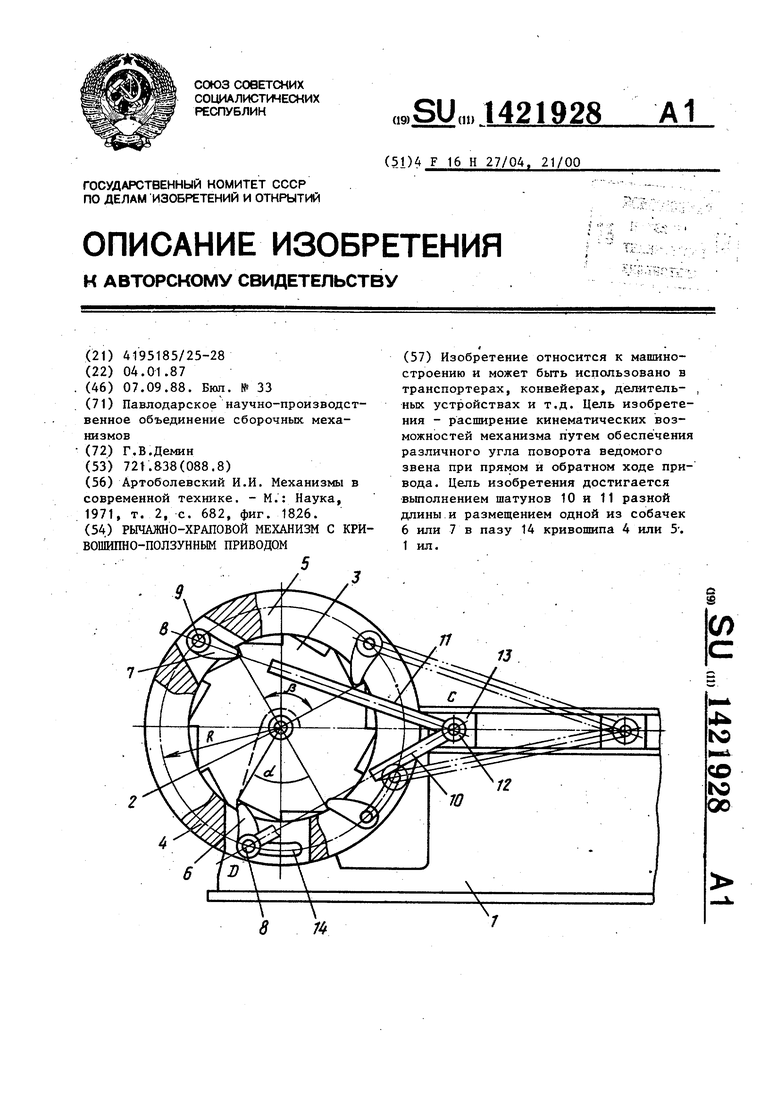
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1971, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ИЗМЕЛЬЧЕНИЯ ПЛАСТА, ОТВАЛИВАЕМОГО ПЛУГОМ | 1914 |
|
SU682A1 |
| Вертикальный ветряный двигатель | 1921 |
|
SU1826A1 |
